Книга: Опционы: Разработка, оптимизация и тестирование торговых стратегий
Назад: 2.4. Многокритериальная оптимизация
Дальше: 2.6. Устойчивость оптимизационного пространства
2.5. Выбор оптимального решения по признаку робастности
Как было показано в предыдущем разделе, многокритериальная оптимизация имеет один существенный недостаток. В большинстве случаев одновременное использование множества целевых функций приводит к нахождению нескольких оптимальных решений. Хотя ни одно из них не является предпочтительным по отношению к другим, нам необходимо выбрать единственный вариант. Такой выбор можно сделать исходя из формы поверхности оптимальных областей, на которых находятся узлы найденных решений.
При выборе оптимального решения на основе многокритериального анализа принимаются в расчет только значения целевых функций каждого узла оптимизационного пространства. Целевые функции соседних узлов полностью игнорируются. Между тем рельеф оптимальной области является важным показателем надежности оптимизации. При прочих равных условиях предпочтителен такой узел оптимизационного пространства, который располагается в центре относительно гладкой высокой области (высота определяется значением целевой функции). Предпочтительно также, чтобы данная область имела широкие покатые склоны. Это означает, что узлы, окружающие узел оптимального решения, должны быть близкими к нему по значениям целевой функции.
В соответствии с данным ранее определением оптимальное решение, расположенное в пределах такой области, является робастным. Если же оптимальное решение располагается в области, характеризующейся большими перепадами высот, острыми пиками и глубокими впадинами, то оно является менее робастным и, соответственно, менее надежным.
Хотя применительно к процедуре оптимизации понятие робастности не имеет строгого математического определения, в общем виде можно утверждать, что оптимальное решение, расположенное на гладкой поверхности, является более робастным, чем решение, расположенное на изломанной поверхности. Если решение робастно, то небольшие изменения в значениях оптимизируемых параметров не приводят к большим изменениям целевой функции.
Для того чтобы выбор оптимального решения основывался не только на высотной отметке, но и учитывал робастность, необходимо количественно оценить рельеф окружающей области и меру его изломанности. В случае многомерного пространства эта задача очень сложна и требует привлечения методов топологии. Однако для двумерного пространства можно предложить несколько относительно простых в реализации решений.
2.5.1. Усреднение соседних ячеек
Этот метод оценки робастности аналогичен построению скользящих средних. При построении скользящего среднего усреднение целевой функции (обычно это цена или объем торгов) производится по мере движения во времени, а само усреднение используется для описания временной динамики и определения ценовых или каких-либо других трендов. Для изучения рельефа оптимизационной поверхности и оценки робастности оптимального решения, усреднение целевой функции производится по мере движения в оптимизационном пространстве. В каждом узле пространства значение целевой функции заменяется средним значением целевой функции соседних узлов, окружающих данный узел. Таким образом оригинальное оптимизационное пространство трансформируется в новое пространство, которое используется для поиска оптимального решения. Поиск производится по высотным отметкам трансформированного пространства. Новая высотная отметка каждого узла теперь содержит информацию не только о значении целевой функции самого узла, но и о значениях целевой функции небольшой области, окружающей данный узел. Следовательно, в процессе оптимизации производится не только максимизация целевой функции, но учитывается также робастность потенциального оптимального решения.
Единственным параметром усреднения является диапазон усредняемых узлов. Это могут быть только соседние узлы (одна линия узлов, расположенных вокруг данного узла). В случае двумерной оптимизации, каждый узел соседствует с восемью другими узлами (за исключением узлов, расположенных на границах допустимых значений параметров). Поэтому при усреднении одного ряда узлов, среднее значение рассчитывается по девяти данным – восьми значениям соседних узлов плюс значение центрального узла. При усреднении двух рядов расчет проводится по 25 данным, для трех линий – по 49 и т. д. В общем виде количество усредняемых узлов n определяется следующим образом:
n = (2m + 1)²,
где m – число рядов узлов, окружающих вычисляемый узел.
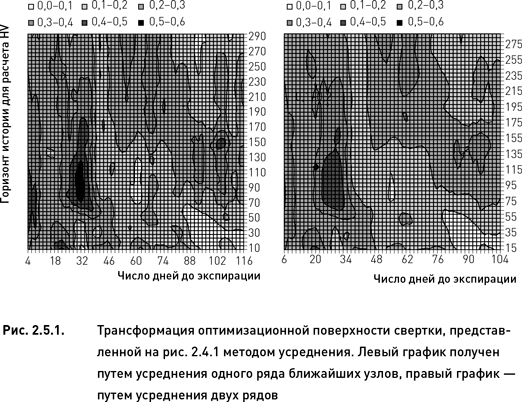
Применим данную процедуру к оптимизационной поверхности, полученной ранее в результате свертки трех целевых функций. Исходное оптимизационное пространство (рис. 2.4.1) содержит три оптимальные области, каждая из которых может рассматриваться в качестве кандидата на поиск оптимального решения. На рис. 2.5.1 показаны две трансформации оригинальной поверхности, построенные для m = 1 (усреднение одного ряда соседних ячеек) и m = 2 (усреднение двух рядов). После трансформации, состоящей в усреднении ближайших узлов (левый график рис. 2.5.1), из трех оптимальных областей осталась только одна, расположенная в диапазоне от 28 до 34 дней по параметру «количество дней до экспирации» и 75–125 дней по параметру «период истории для расчета HV». Причина исчезновения двух других областей заключается в том, что их экстремумы оказались менее робастны, чем экстремум сохранившейся области. Трансформация, полученная путем усреднения большего количества узлов (правый график рис. 2.5.1), приводит к аналогичным результатам – исчезновению двух оптимальных областей и сохранению одной области оптимизационного пространства в качестве оптимальной. Таким образом, обе трансформации указывают на предпочтительность выбора одной и той же области. Данная область, помимо наибольшей робастности, имеет еще и наибольшую площадь. Это является дополнительным преимуществом для выбора оптимального решения в пределах именно этой области.
2.5.2. Отношение среднего к стандартному отклонению
Хотя описанный в предыдущем разделе метод усреднения и учитывает при выборе оптимальной области ее высоту (значение целевой функции) и гладкость (робастность), но влияние первой величины перевешивает влияние второй. Предлагаемый в этом разделе метод придает робастности гораздо больший вес. В соответствии с данным методом значение целевой функции в каждом узле исходного оптимизационного пространства заменяется отношением среднего значения целевой функции группы узлов к стандартному отклонению, рассчитанному для этой же группы. Понятие «группы узлов» имеет тот же смысл, что и в процедуре усреднения. К группе относится сам узел и один, два, и т. д. рядов окружающих узлов. Такая трансформация поверхности учитывает как высотные отметки оптимальной области (числитель), так и гладкость ее рельефа (знаменатель).
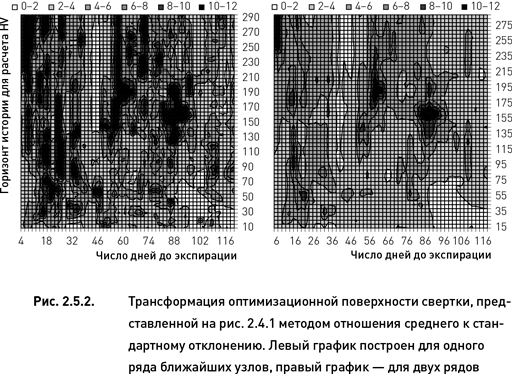
На рис. 2.5.2 показаны две трансформации свертки, изображенной на рис. 2.4.1. Также как и в предыдущем разделе, трансформации строились с использованием одного и двух рядов соседних узлов (m = 1 и m = 2 соответственно). При использовании одного ряда узлов (левый график рис. 2.5.2) возникает большое количество новых оптимальных областей (исходное оптимизационное пространство содержит всего три оптимальные области). Количество новых областей столь велико, что выбор одной из них практически невозможен. Эта проблема разрешается путем использования большей группы узлов (два ряда). В этом случае рельеф трансформированного оптимизационного пространства существенно упрощается (правый график рис. 2.5.2) и мы получаем всего три оптимальные области, из которых необходимо выбрать одну.
В отличие от трансформации методом усреднения (см. предыдущий раздел) ни одна из трех оптимальных областей не совпадает с оптимальными областями оригинального оптимизационного пространства. Это объясняется тем, что оптимальные области исходной свертки представляют собой узкие хребты и высокие пики. То есть эти области не достаточно робастны и обладают довольно ломанным рельефом. В противоположность этому три оптимальные области трансформированного пространства хоть и не расположены на самых высоких хребтах, зато находятся на достаточно гладких и широких плато средней высоты, что может быть предпочтительно с точки зрения их робастности. Поскольку эти три оптимальные области равноценны как по значению целевой функции, так и по робастности, выбрать из них одну можно по площади поверхности и по ее форме. При прочих равных условиях предпочтительно, чтобы оптимальная область имела большую площадь поверхности и более округлую форму (узкие области менее робастны по крайней мере по одному из параметров). Этим критериям соответствует область, расположенная в диапазоне 84–92 дней по параметру «количество дней до экспирации» и 155–175 дней по параметру «период истории для расчета HV».
2.5.3. Геометрия поверхности
Две методики, описанные в предыдущих разделах, основываются на трансформации оптимизационного пространства. Теперь мы опишем альтернативный подход, не требующий трансформации. Он основан на изучении и сравнении геометрии оптимальных областей. В принципе можно разработать множество таких подходов, требующих применения математического аппарата большей или меньшей сложности. Здесь мы предложим один из возможных путей решения этой задачи.
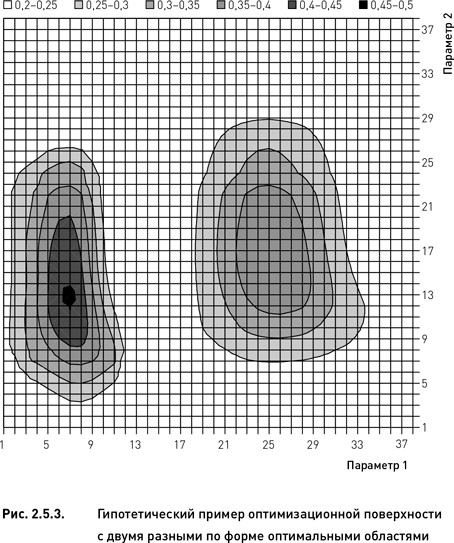
Рассмотрим гипотетическое оптимизационное пространство (рис. 2.5.3), имеющее две оптимальные области. Одна из них (расположенная в левой части пространства) меньше по площади, имеет более вытянутую форму и более высокую вершину. Другая область (расположенная правее) имеет большую площадь, более округлую форму и меньшую высоту. Необходимо принять решение, которая из двух областей предпочтительна для выбора оптимального решения. Предлагаемый нами подход основан на допущении о предпочтительности той области, которая имеет большую площадь поверхности. Такое допущение вполне реалистично, поскольку большая площадь может быть признаком оптимального сочетания двух факторов – более высокого значения целевой функции в точке экстремума и большей робастности потенциального оптимального решения.
Будем считать, что оптимальная область представляет собой конус. Безусловно, такое допущение является упрощением, в реальности области имеют более сложную форму. Тем не менее многие из них действительно напоминают по форме конус. Любую оптимальную область можно привести к конусу путем несложных математических манипуляций. Это позволит вычислить площадь поверхности оптимальной области, не прибегая к сложным методам дифференцирования. Для того чтобы численно выразить площадь путем приведения определенной области оптимизационного пространства к конусу, необходимо выполнить следующие процедуры.
1. Задать уровень целевой функции, определяющий границу оптимальной области. Все узлы, находящиеся выше этого уровня, считаются принадлежащими к оптимальной области и, соответственно, к поверхности конусов. Данный уровень является основанием конуса. На рис. 2.5.3 в качестве такого уровня принят 0,25.
2. Определить площадь основания конуса, выраженную в количестве узлов, расположенных в пределах границы оптимальной области. В примере, представленном на рис. 2.5.3, эта площадь равна количеству ячеек, расположенных в пределах кольца, определяющего уровень 0,25.
3. Зная площадь основания конуса k, можно рассчитать радиус условной окружности, лежащей в основании конуса: 
4. Рассчитать площадь боковой поверхности конуса по формуле S = Lπr, где L – это сторона конуса.
Используя теорему Пифагора, можно вычислить сторону конуса по формуле
где h – это высота конуса. Высота конуса нам известна – это значение целевой функции в точке экстремума оптимальной области. Зная длину стороны, можно рассчитать интересующую нас площадь боковой поверхности конуса:
Произведя простые алгебраические преобразования, получим:

Применяя данную методику, необходимо учитывать, что k и h выражены в разных единицах измерения. Первая величина выражена в количестве узлов, а вторая – это значение целевой функции, которое может быть любым (проценты, доллары, любой другой показатель). Поэтому S является безразмерной величиной, которая, хотя и пропорциональна реальной площади оптимальной поверхности (и может использоваться для сравнения между собой разных оптимальных областей), не является площадью в истинном смысле. Во избежание недоразумений в дальнейшем мы будем называть этот показатель «условной площадью». Необходимо, чтобы k и h имели приблизительно одинаковую размерность (например, если максимум целевой функции h = 5, а k = 70, то следует преобразовать k путем нормирования его значения на 10. Кроме того, величина h не должна быть меньше 1, поскольку в противном случае возведение в квадрат (см. формулу 2.5.1) не увеличит, а уменьшит результирующую величину.
Продемонстрируем практическое применение этой методики. В гипотетическом примере, представленном на рис. 2.5.3, левая область состоит из 185 узлов; значение целевой функции узла с максимальной высотной отметкой равно 0,47 (то есть k = 185, h = 0,47). Для правой области k = 266, h = 0,40. Для того чтобы привести переменные k и h к единой размерности, следует разделить k на 100 и умножить h на 10 (чтобы соблюсти условие h > 1). Воспользовавшись формулой 2.5.1, получим:
Показатель условной площади левой оптимальной области меньше показателя правой области. Это означает, что, несмотря на то что левая область имеет большую высоту, правая является предпочтительной. Следовательно, в данном случае преимущество более широкой и покатой поверхности правой области (то есть преимущество по признаку робастности) перевесили преимущество более высокого значения целевой функции левой области.
Теперь рассмотрим пример, основанный на реальных рыночных данных. На правом графике рис. 2.5.2 имеются три области с высотными отметками выше 10 (напомним, что данная оптимизационная поверхность является продуктом трансформации исходной поверхности, полученной путем свертки трех функций полезности). Обозначим их как «левая», «средняя» и «правая». Все три области имеют близкие по величине площади основания (kleft = 10, kmiddle = 13, kright = 14) и высотные отметки (hleft = 14,09, hmiddle = 13,45, hright = 11,91), что делает выбор одной из них затруднительным. Применение нашей методики позволяет сделать объективный выбор. Поскольку k и h имеют одинаковый порядок величин и h > 1, никаких трансформаций не требуется. Подставляя значения в формулу 2.5.1, получим: Sleft = 79,6, Smiddle = 86,9, Sright = 80,2. Следовательно, выбор средней области является в данном случае предпочтительным. Это решение не тривиально, поскольку данная область не имеет ни наибольшую из трех вариантов площадь основания, ни наибольшую отметку. Интересно, что данный пример демонстрирует комбинированное применение двух методик: вначале оптимизационное пространство было трансформировано путем вычисления отношения среднего к стандартному отклонению, а затем выбор оптимальной области осуществлялся по методу оценки геометрии поверхности.

