Книга: Микромеханические системы и элементы
Назад: 2.5. Перспективы и тенденции развития магниточувствительных и магнитоуправляемых микросхем
Дальше: 2.7. Тензорезисторы
2.6. Магниточувствительные датчики перемещения
Промышленное производство магнитных датчиков перемещения осуществляется многими зарубежными фирмами. Среди них наиболее известны фирмы Honeywell, Murata, Allegro Micro Systems Inc., Hitachi, Siemens A. G., RS Components, которые выпускают магнитные датчики перемещения с использованием всех известных типов преобразователей магнитного поля. В качестве примера рассмотрим характеристики отдельных типов датчиков перемещения, выпускаемых зарубежными производителями.
2.6.1. Магнитные датчики линейного перемещения
Датчики линейного перемещения (ДЛП) предназначены для преобразования линейного перемещения объекта контроля в выходной электрический сигнал, пропорциональный этому перемещению. Основное требование к датчикам линейного перемещения – это линейная зависимость выходного сигнала от расстояния перемещения. Внешний вид датчиков линейного перемещения поясняется на рис. 2.18.
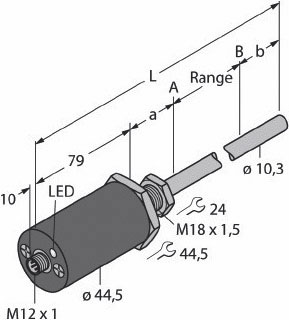
Рис. 2.18. Внешний вид датчиков линейного перемещения
2.6.2. Координаточувствительные магнитные датчики
В качестве координаточувствительных магнитных датчиков (КМД) могут использоваться различные преобразователи магнитного поля, имеющие оригинальную топологию МЧЭ и включенные соответствующим образом. Как один из вариантов такого датчика рассмотрим двухкоординатный датчик линейного перемещения с использованием двух магниторезисторов, внешний вид которого приведен на рис. 2.19.
Магниточувствительный элемент такого датчика состоит из двух одинаковых плеч, расположенных под прямым углом друг к другу. Управляющее магнитное поле имеет форму квадрата, длина стороны которого равна длине элемента L или больше нее. Каждый магниточувствительный элемент подключен к источнику тока, и через него протекает ток I [16]. При перемещении источника магнитного поля в любом направлении в первом квадранте на выводах элементов возникают напряжения, пропорциональные горизонтальной и вертикальной составляющим перемещения.
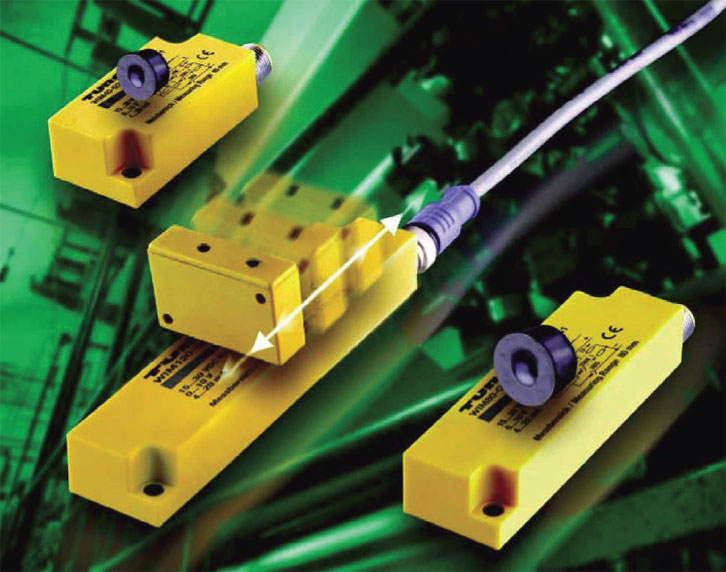
Рис. 2.19. Координаточувствительный магнитный датчик на производстве
На рис. 2.20 приведена схема четырехкоодинатного датчика для регистрации перемещения в любой точке плоскости X, Y. Четыре магниторезисторных элемента, каждый длиной L, расположены крестообразно. Элементы подключены к источникам тока, через них проходит ток I. Выходное напряжение, пропорциональное составляющей перемещения по горизонтальному направлению, снимается с выводов А и В, а выходное напряжение, пропорциональное составляющей перемещения по вертикальному направлению, – с выводов С и D.
Полюсный наконечник имеет форму квадрата со стороной, длина которой равна длине каждого элемента L. Начальное положение датчика определяется местом, в котором наконечник расположен симметрично относительно центрального электрода, при этом половина длины каждого МЧЭ находится под воздействием управляющего магнитного поля и выходные напряжения, снимаемые с концов каждого элемента, равняются нулю [5].
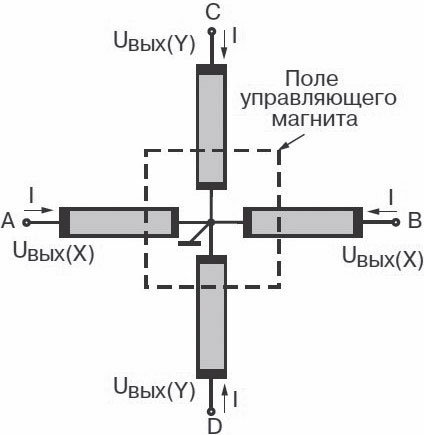
Рис. 2.20. Схема четырехкоодинатного датчика для регистрации перемещения в любой точке плоскости X, Y
При перемещении полюсного наконечника в любом направлении на плоскости X-0-Y на выводах элементов 1 и 2 возникают два независимых напряжения со знаком полярности, соответствующих направлению горизонтальной и вертикальной составляющих перемещения и пропорциональных им.
2.6.3. Устройства для определения вектора магнитного поля с применением феррозондов
Принципы работы устройств, использующих феррозондовые преобразователи магнитного поля, рассмотрены во многих технических изданиях. А потому в качестве примера приведу краткие описания принципов работы нескольких таких устройств.
Конструкция простейшего феррозондового датчика направления, используемого в автомобильном навигаторе. Датчик навигатора представляет собой кольцо из материала с высокой магнитной проницаемостью, на которое намотаны обмотка возбуждения и перпендикулярно друг другу две измерительные обмотки. Принцип действия датчика заключается в следующем.
Если на обмотку возбуждения подать переменное напряжение, то магнитный поток в сердечнике будет изменяться, и за счет возникновения электромагнитной индукции на выходе измерительных обмоток появится «наведенное» напряжение. При отсутствии внешнего магнитного поля напряжение на измерительных обмотках будет тоже отсутствовать, поскольку изменение магнитного потока в этом случае вызывает появление в двух точках сердечника напряжений противоположной полярности, которые компенсируют друг друга. Если перпендикулярно обмотке X воздействует магнитное поле с напряженностью Н, то оно складывается с магнитным полем возбуждения, и изменения магнитного потока становятся асимметричными. В результате этого появляется выходное напряжение, пропорциональное производной разности магнитных потоков.
2.6.4. Ориентационный МЭМС-датчик угла наклона
На рис. 2.21 схематично показан датчик типа TMS-215, выпускаемый фирмой TDK. Ведущим производителем феррозондовых датчиков является фирма Applied Physics System, которая выпускает серию датчиков: APS544, APS520, APS520A, APS533, APS534, APS428C, APS450, APS460, APS470, HP3529 и др.
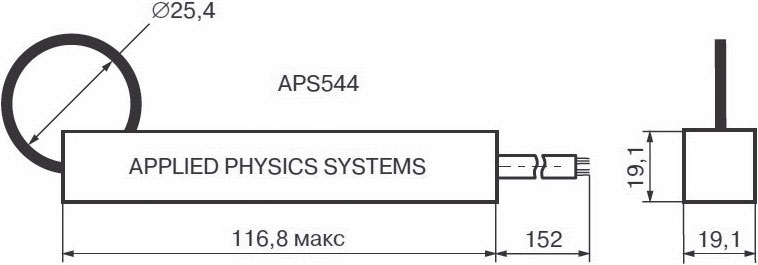
Рис. 2.21
Миниатюрный ориентационный датчик угла APS544
Устройство представляет собой трехкоординатный магнитометр, сопряженный с трехкоординатным акселерометром. Прибор регистрирует магнитное поле, направленное по любой из трех осей (X, Y, Z). Он выполнен в виде отдельного модуля, в котором используется миниатюрный феррозондовый датчик, схема усиления и обработки сигнала. Результаты измерений выводятся по специальному кабелю в цифровой форме. Для вывода информации используется стандартный интерфейс RS-232.
Прибор размещен в пластмассовом корпусе прямоугольной формы. Максимальные габариты – 19,1×19,1×117 мм, масса – 50 г. Внешний вид этого датчика показан на рис. 6.59.
Ориентационный датчик APS544 предназначен для применения в системах ориентации и навигации различного назначения (в том числе буровых установок и бакенов); для измерения параметров магнитных полей, для аппаратуры слежения за миграцией животных и т. п.
Назад: 2.5. Перспективы и тенденции развития магниточувствительных и магнитоуправляемых микросхем
Дальше: 2.7. Тензорезисторы

