3: Working with Valve Characteristic Curves
When designing valve equipment we need to find the correct data for the
particular valve being used. This can be obtained from the manufacturer’s data sheet, which today can often be found on the Internet with little trouble. The data sheet will contains lots of information, some in short-form and others in a series of curves. Often the data contained in the curves seems to be just a lot of lines and curves and at first sight does not help very much. However, if these curves are correctly interpreted then a lot of valid design data is made available.
The short form data will often be given in tables and will typically contain data on the maximum ratings, filament voltage and current, capacitance of the various electrodes and usually some indication of the maximum operating frequency and any derating necessary. Let us look at this short form data to see what it tells us.
Maximum Ratings
Very often these are split into critical areas and others that are not so critical. The critical items will be things like the maximum anode voltage, anode current, anode dissipation and temperature. Exceeding any of these by a large amount is likely to either shorten the valve life or cause a catastrophic failure. Similarly, some valves need good filament supply regulation for long life. Mullard states that in general a tolerance of ±2.5% or better is necessary for longest life, although some valves designed for mobile radio applications can tolerate up to ±10% for short periods.
Other maximum rating items will be operating frequency and DC input power or current. Obviously if the valve is intended for RF amplification it is pointless selecting a valve that will not work properly at the frequency of choice. Normally valves do not stop working when the maximum frequency is exceeded, rather they gradually fall off in gain and efficiency, as the frequency becomes higher.
Typical Operating Recommendations
Normally the manufacturer will give some examples of the optimum values of anode voltage and power output to be expected when operated with the recommended supply voltages and currents. These are generally a very good indication if the valve will fulfil your requirements. It is prudent to select a valve that has a bit of capacity in hand, so you are not disappointed when the equipment is finally constructed. For example, if the operating frequency is 145MHz a valve with at least this rating is required and often manufacturers will give an example of operation at 175MHz. In this case 145MHz is quite a bit lower and this valve would suffice. However, if 432MHz is needed this valve is not going to be of much use.
The recommended values for anode voltage and current will give good valve life when complying to the CCS rating, Continuous Commercial Service. These assume operation is 100% of the ratings 24 hours per day. For short periods (intermittent rating) some of the parameters may by exceeded by about 25% without severely degrading the valve life. These ratings are the ICAS ratings – Intermittent Commercial and Amateur Service ratings. These need to be viewed with some caution. It is normally permissible to increase the anode voltage by up to 25% of the maximum CCS rating, but the assumption is made that the anode current is the same as the CCS rating. That is, you may increase one of them but not both simultaneously. Mullard states that where the stage efficiency is critical (lowest heat developed) it is preferable to keep the anode voltage as high as practical within the normal ratings and to reduce the anode current. Lowering the anode voltage and increasing the anode current to achieve the same input power is not as efficient, and in some cases can radically reduce the life of the cathode.
There are so many different valves available that to try to cover all types would be impossible. So this chapter will focus on a particular valve series. This is the popular dual-tetrode, the Mullard QQV06-40, which is part of a family of VHF / UHF valves. This also goes under the American number of 5894 and QQE06-40 is the later designation. Others in the series are the QQV03-20, QQV07-50, YL-1060 and YL-1070 series. It also covers the quick-heat filament version the QQZ06-40 /
YL-1030.
To make sense of the valve data we need to know how to interpret the characteristic curves and what each curve can tell us.
Conductance is the inverse of resistance: its shorthand unit is shown as G or g. It is a measure of how well a conductor, such as a copper wire, carries a current. If the wire is large in diameter it has a low resistance and can handle a large current. The conductance value is the opposite, if the conductance is high the resistance is low.
Transconductance S (gm)
This is a terminology used for both valves and semiconductor devices and is short for transfer conductance. In earlier days it was known as mutual conductance and this is why the shorthand notation is gm. If we look at a typical valve or transistor data sheet it is normally stated in one of several different ways. The reason is that over the years the industry changed from the old measurement system to the modern ISO system.
Units of Conductance
In the old measurement system the unit of conductance was the mho. This is the word Ohm spelt backwards and it made sense to use it as conductance is the reciprocal of resistance. A resistance of 1Ω is a conductance of 1mho. However, a resistance of 0.1Ω is equivalent to a conductance of 10 mho. (The Ohm is named after a German scientist Dr G S Ohm, hence when it is used it uses the upper-case letter. The mho is not named after a person so it uses the lower-case letter).
In American manufacturer’s data sheets we see in the older devices the transconductance stated in micro-mhos, which was abbreviated to µmho. Today we have moved forward and after going through a transitional period we arrived at the modern method of stating conductance. In valves and semiconductors, the transfer conductance is a measure of how much the current will vary when the input signal is varied. Traditionally, the unit of transconductance measurement is the milli-Amp (mA) for a 1V change in input signal. The shorthand symbol for trans-conductance is known as gm. Hence, the gm of a device is given in mA/V.
The older American manuf-acturers’ valve data sheets, when the capacitance values of the various parts of the valve were characterised, also used the obsolete micro-micro Farad symbol (µµF). Today it is known as the pico-Farad (pF).
Today we use a different notation but the units are the same. In the old µmho notation, 1000 µmho = 1mA/V. A device denoted by the interim system of 25mA/V is the same as 25,000 µmhos. Today the unit of conductance is the Siemens, named after a German engineer-scientist Ernst Werner (von) Siemens, the founder of the present day Siemens company. The abbreviation of the Siemens is the upper-case letter S and not the lower-case, which is reserved as the shorthand unit for time in seconds. Note that the singular and plural is always Siemens, as it named after the inventor.
1mA/V is the same as 1,000 µmhos and 1 milli-Siemens (1mS).
The higher the transconductance value the smaller the grid driving signal needs to be to provide an adequate amount of anode current to flow. A small triode might have a transconductance as low as 2.5mA/V whereas a large transmitting tetrode might be as high as 50mA/V. The transconductance value is hence an indication of the power gain of a valve, high transconductance equating to high power gain.
Today this process is often automated and it takes very little time to produce a set of curves. It is used as a ‘Go / No Go’ test to find any faulty valves in production. However, not all points are checked, just sufficient to identify those valves needing rejection. If the requirement is for two perfectly matched valves it can be very laborious to sort through and test many valves to find a pair that are closely matched, and this is something you have to pay for!
Valve Curves and Charts
When the anode current curves of a valve are examined on a data sheet, it is normal to find that the curves on the chart are indeed curves and not straight lines. This can be misleading because the manufacturers charts are obtained in a different way to how the valve will normally be operated.
The curves are normally known as constant current curves as the valve is supplied with a fixed anode supply voltage, perhaps 100V, and the anode current varied by varying the control grid voltage. The valve is behaving as a variable resistance as the grid voltage is varied. The grid voltage is changed in logical steps and at each grid voltage the anode current is recorded. When one set of curves have been plotted the anode supply is changed to another DC voltage, perhaps 150V, and a new set of points are measured. This is repeated as many times as necessary to cover the anode voltage range and all the plotted points are then drawn on a single graph. All this takes a lot of effort to obtain accurate results and is a long-winded process.
The valve characteristic curves are obtained by using a test method as shown in Fig 3.1. For a tetrode or pentode another positive variable DC high voltage would be required with meters to measure voltage and current.

Fig 3.1: Basic test method for a triode valve.
Valve Characteristic Curves
There are three basic sets of curves and each one gives specific information on how the valve behaves under different operating conditions. Some valves used for RF amplifier duty today were not originally specified for linear amplification (or even RF amplifier duty – the 811 valve was only rated as an audio amplifier originally) but rather for Class C operation. Although the data sheet is primarily focussed on Class C operation, by extracting information from the curves we can determine the best method of operating in Class AB1 or AB2.
The first set of curves for the QQV06-40 / 5894 valve is shown in Fig 3.2. The QQE06-40 is virtually identical. Mullard supplies two different sets of curves. One is for a screen grid voltage of 200V and the other is for 250V. For maximum gain and output power normally we would select the 250V option. However, later we will see this isn’t always the best option.

Fig 3.2: Constant Current Curves for the QQV06-40 with Vg2 = 200V (from Mullard Technical Handbook, Book 2 Part 4, ‘Valves and Tubes’, 1969).
The horizontal axis of the curves gives the anode supply voltage (Va) and the vertical axis gives the anode current. As this is a dual-valve, the graphs show how each individual section or half of the valve behaves. This is stated as “Each Section” so there can be no confusion if this curve is for one section or both combined. The other clarifying factor is “Vg2 = 200V”. The maximum recommended anode voltage for the QQV06-40 is 600V, so the voltage scale does not exceed this.
The various curves are for different control grid voltage (Vg1), which are plotted between –20V and +25V. Under Class C operation the control grid is swung well above the zero voltage point, so considerable grid current flows. This allows high efficiency and high output power. Typically, the valve can achieve an efficiency of ~75% at 175MHz under Class C operation. When operated as a linear amplifier in Class AB1 or AB2 the efficiency will be lower.
Let us assume that the anode voltage is not 600V but something lower: 500V is convenient and so it will be used for this explanation. Before we start extracting data, we need to introduce the second graph. This is similar to the first but gives extra information we need to start the design. This chart is shown in Fig 3.3. This chart also contains the third set of curves, the grid current curves. (There is one further set of charts which we will ignore for now, these charts detail the screen grid current).

Fig 3.3: QQV06-40 curves of anode current versus control grid voltage (from Mullard Technical Handbook, Book 2 Part 4, ‘Valves and Tubes’, 1969).
Again, so that there is no confusion, Mullard states that the graph is “Each Section” and is for the condition of Vg2 = 200V. The curves also contain the details of the control grid current to be expected under various operating conditions. As with all manufacturers’ published data the results are the average from many different new valves, so your valve may well be very close, but not necessarily identical, to the curves given. If the valve has been in service for some time, or has been in prolonged storage – ‘new old stock’ (NOS) components – then a little degradation is to be expected. Using the chart, we can ascertain if the valve is actually any good for the envisaged application.
To start the design we first need to ascertain what control grid voltage will be required to cut-off the anode current so the valve is biased into Class C. This is found by moving along the bottom curve of 0mA until the curve intercepts the 500V volt vertical line. Now we draw a horizontal line to intercept the left-hand vertical axis that is the Vg1 scale. This scale is 2V per division. We find that it needs –29V to just bring the anode current to 0mA.
To construct a table of anode current versus input drive voltage is simple. We draw a vertical line at 500V and read off at each anode current curve what the Vg1 value is. See Table 3.1.
Anode Current mA | Vg1 Volts |
0 | -29 |
100 | -8 |
200 | 0 |
300 | +10 |
400 | +15 |
500 | +19 |
Table 3.1: QQV06-40 anode current versus input drive voltage.
From the same chart we can also establish what the value of grid current will be for different drive levels. Obviously, no grid current can flow until the control grid is driven positive with respect to the cathode and the vertical axis marked Vg1 is really the Vg1 to cathode measurement, but is often omitted for simplicity. By using a similar plotting method we can ascertain the grid voltage required for the grid current as these are marked in 10mA increments from 10mA to 40mA. This is shown in Table 3.2.
Grid Current mA | Vg1 Volts |
10 | +10 |
20 | +17 |
30 | +24 |
40 | +30 |
Table 3.2: QQV06-40 grid current versus input drive voltage.
Mullard states that for best efficiency under Class C a grid current of ~4mA is required, but excessive grid current causes heating of the grid structure and using more than about 5mA to 10mA is not recommended. From this we can interpolate that the peak grid voltage required is about +5V. The cut-off voltage we have ascertained as being –29V so to swing the grid up to +5V is a peak voltage of
(29 + 5) = 34V. To find the drive voltage in RMS value we multiply the 34V by 0.707 and we obtain a value of 24V RMS. In practice we normally bias the control grid much lower, a typical choice would be twice the cut-off voltage. So this equates to a grid bias voltage of about –58V. To now swing the grid positive by +5V needs a peak voltage swing of (58 + 5) = 63V, an RMS input signal of about 45V.
Push-Pull and Parallel Operation
This family of valves, although originally designed for push-pull operation, can also be used with the two halves strapped in parallel. In HF SSB mobile equipment it was a popular valve as it is a direct equivalent of 2 x 6146 valves and occupies less volume. The two halves of the valve are also very closely matched in manufacture, typically better than 1%. The 6146 has an anode dissipation of 20W (it was also made by Mullard as the QV06-20) and each half of the QQV06-40 has the same anode dissipation.
It must be clarified that we are only dealing with one half of the valve at present, so the currents we ascertain are half of the total the valve will draw in operation, but only if the two halves are strapped in parallel. The grid and anode currents will be twice the values we have so far determined.
However, in a push-pull amplifier the two valves are driven by a grid voltage, which is 180º out of phase. When one half is being driven with an increasing anode current, due to the grid voltage rising towards the positive condition, the opposite half has an increasing negative grid voltage and its anode current is falling towards zero. The net result is that the anode current measured is approximately the true anode current of one half. As with the parallel amplifier each half of the valve provides half the total output power, but in the push-pull amplifier they take turns in supplying the power. In a parallel amplifier both valves operate together.
The other thing to appreciate is that the currents are the peak value the grid and anode will swing up to on the positive half of the input signal. The average value of a sinusoidal waveform is 0.637 of the peak. Any anode or grid current meter is an average reading type so the currents displayed are not the true peak values.
Plotting an alternative chart
It is useful to take extra readings from the charts to construct a fuller set of data points for the particular anode voltage required. This clears away most of the clutter of the normal curves and makes it easier to see the picture. Using Fig 3.2 as well as Fig 3.3 we can construct a true indication of how the anode current varies against the grid input signal. Again these are the peak values of the sinusoidal input signal.
Fig 3.4 is a plot of a typical curve for the QQV06-40 / 5894 valve for a screen voltage of 200V and 250V when the anode supply is 600V, so we can see the differences. In this case the valve is not biased to cut-off but for Class AB1 operation.
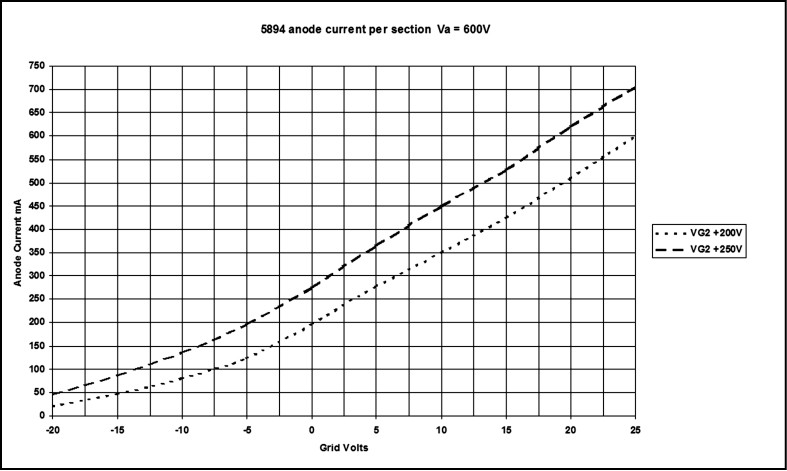
Fig 3.4: Typical characteristic curve.
As can be seen, the use of Vg2 of 250V allows a higher power input to be attained and hence a higher gain and output power than 200V. It does, however, mean that more care must be taken that the input drive level is not excessive to prevent over-dissipation in the valve.
Anode Resistance
The resistance the anode exhibits is determined by the grid-cathode voltage. When the grid voltage is lower than the cut-off voltage the valve appears to behave as a very high anode to cathode resistance. As the grid voltage is raised more positive, the anode resistance falls to a lower value. Fig 3.5 shows how a typical valve behaves when the grid voltage is varied.

Fig 3.5: Typical anode resistance variation versus control grid voltage.
At a grid voltage of –20V, the anode resistance is high. As the grid bias is lowered, the resistance falls to a low value. The resistance is also determined by the screen grid voltage (Vg2) and higher values of Vg2 cause more current to flow as the resistance can be driven lower. When the grid voltage exceeds 0V, the grid is now positive with respect to the cathode and greater anode current flows for the same anode voltage and screen grid voltage.
As is to be expected, when the screen grid voltage is higher the valve can draw more anode current for a particular grid voltage. It has more current gain and hence a lower anode resistance. From this chart we can ascertain the anode load required to extract the maximum power from the valve, the conjugate match criteria. It can be ascertained that each half of the valve exhibits a resistance of about 2kΩ when the grid voltage swings up to 0V, that is the maximum drive possible in Class AB1. Hence, in a push-pull amplifier the anode tank circuit needs to be ~4kΩ anode-anode for maximum power transfer at peak output. In parallel operation the anode resistance or load is halved.
When the valve is not fully driven its anode resistance is higher and it no longer complies with the conjugate match criteria, as the anode tank circuit is fixed at a particular load resistance. The efficiency will then be much lower than at peak output. Considering typical efficiency that can be attained in Class AB1, it is only about 55% at best. The efficiency when the valve is only driven to half the power will then be 27.5% and if only driven to quarter power it will be 12.75% at best. In SSB operation the peak power only occurs rarely as the average power is normally much lower.
For Class AB2 the valve is driven into grid current. The amount that can be tolerated is largely a function of how linear the valve is. The QQV06-40 was not specifically designed for operation in linear modes and it cannot normally tolerate more than about 1mA of grid current before it becomes non-linear. This limits the extra power the valve could give under AB2 operation. For Class C, where linearity is not an issue, the valve can give appreciably more power output with a higher efficiency.
Checking Emission
If your valve is of dubious previous life, a simple test will ascertain if it is suitable for further use. All valves slowly degrade over their life as the cathode may have lost some of its emission and no longer fits the manufacturer’s data. To check emission is simple. Power up the filament and apply a known anode, screen grid and a variable bias supply to the control grid. Try to pick an anode voltage and screen grid voltage close to the recommended values. A safer and simpler method is to strap the screen grid and anodes together and the two control grids together to operate the two halves in parallel as a dual triode. Use a fairly low supply voltage, +200V will give a valid result as this is plotted on the anode voltage curves for the 200V Vg2 chart (Fig 3.2).
By measuring the anode current as the grid voltage is varied we can see what anode current is possible. This needs to be done at low anode current because if the current is too high the danger of damaging the valve is greater: do not hold the anode current on for longer than needed to make a measurement.
Apply a high negative grid voltage and gradually decrease it until you see some small anode current begin to flow. Adjust the grid voltage to obtain a logical anode current, say 200mA, this is the curve marked 100mA as the two halves are now connected in parallel, and read off the grid voltage for this current. This anode current is the maximum allowed anode dissipation of the two valves, being
(200V x 0.2A) = 40W. As long as the measurement is made quickly it will not harm the valve. The QQV06-40 can tolerate this dissipation for several minutes if it has adequate cooling. The valve will get hot, but not so hot that it is damaged. Now by finding the anode current curve applicable you can determine what grid voltage should be needed for this anode current. (On Fig 3.3 the 0mA cut-off grid voltage is about –26V and the 100mA curve requires about –7.5V.) You may have to estimate from the curves the approximate grid voltage. If the grid voltage is much lower (less negative) than the manufacturer’s value, the emission is down and it may not be worth continuing.
Valves used in receivers and low power transmitting valves are amazingly long life devices. It is common to find that a valve of 50 years of age is still within 10% of the new values. These sort of valves age gracefully and slowly fade away. If the emission is a bit down, but higher than 70% of the new valve it is often possible to reform the cathode in some cases. To do this all the other supply voltages are removed and the filament voltage increased by about 20% and the valve is ‘baked’ for about an hour. This boils off any impurity in the cathode and when next checked the emission is normally much higher. But it is not a guaranteed method!
Manufacturer’s Output Power Data
Some manufacturers give comprehensive data and others simply the bare minimum. Mullard tend to give comprehensive data that contains some useful extra data. In a practical valve RF amplifier, there are two quoted output power values. The first one is the power the valve can supply to the resonant tank circuit: this is called the ‘Available Output Power’ by Mullard and most other manufacturers. It is the power the valve has transferred from the DC-input power to appear at the anode and is available to be transformed to the final output impedance to the load.
The anode tank circuit has some losses associated within it, so some of the anode power is lost in this network. What is left is the ‘Load Power’ available to excite the antenna. Other manufacturers use slightly different terminology, but the meaning is the same. Table 3.3 shows the data given by Mullard for a push-pull Class C amplifier using the QQV06-40 at 200MHz.
Va | 600V |
Vg2 | 250V |
Vg1 | -80V |
Ia | 2 x 100mA |
Ig2 | 2 x 9mA |
Ig1 | 2 x 3.5mA |
Pin (driver) | 3W |
Pout (anode) | 90W |
η | 75% |
Pout (load) | 78W |
Table 3.3: Mullard test data for the QQV06-40 at 200MHz Class C operation.
The efficiency (η) was determined by building a very high quality output stage using the best available (low loss) components and then testing the valve in this set-up. The efficiency determined fits well with the theoretical value for a Class C stage. As we can see, the anodes provided a total of 90W to the tank circuit. After the impedance was transformed down to the load, the power measured was 78W.
The DC input power to the anodes was (600V x 0.2A) = 120W. The power at the anodes being 90W and the DC input of 120W gives an efficiency of 75%. However, the actual load power output is only 78W and if this is used to calculate the efficiency it gives a value of (78 / 120) = 65%. The 12W lost in the anode tank circuit is the reason the efficiency is not the value Mullard quotes: they give the calculated anode efficiency for the measured anode input power.
This comes about because after the test amplifier was used and readings were taken, the amplifier was powered down and the valve was removed. Then the amplifier output network was measured to determine the insertion loss it provided when under power. Hence, the 90W value stated is not an actual measurement but an inferred one. The power lost in the tank circuit is 12W out of 90W, which as a percentage is 13.33%. 1dB loss in round numbers is 20%, so the tank circuit loss amounted to about 0.66dB.
Mullard did not count the screen grid DC input or the filament power input as being part of the DC input supplied to the valve. The screen grid supply provided an extra (250 x 0.018) = 4.5W of input. Similarly, the filament power was (6.3V x 1.8A) = 11.33W.
If these extra power inputs are included, the value of efficiency drops quite a bit. The total power input to the valve is (120 + 4.5 + 11.33) = 135.83W and the output power to the antenna is 78W. Hence, the true efficiency is 57.4%. If we factor in the power supply and other parts of the amplifier that consume power (fans, dropper resistors etc) it gets even worse. If we were to make a total power input measurement from the AC mains and compare it to the RF output power, it is possible to end up with an overall efficiency of below 30%.
So knowing these facts explains why when we measure an amplifier we get different results and not as good we expected. It also clarifies why, when constructing a RF amplifier, the critical part is the anode tank circuit. If this uses unsuitable or potentially lossy components a great deal of power can be lost.
Anode Current Plot when Biased to Cut-off
When a valve is operated in Class C, the grid bias is a high negative voltage, and more than required to just cut-off the anode current. When the input signal is applied at low amplitude there is insufficient voltage developed to cause the valve to begin conducting. When the input signal is raised the anode current starts to flow in short duration pulses: this is a non-linear type of operation. When the driving signal is a little above the cut-off voltage, the current pulses attain a higher amplitude and the valve can be operated at a high efficiency. An example plot is shown in Fig 3.6 for an input signal that is a little below the maximum amplitude.

Fig 3.6: Anode current plot for a valve biased beyond cut-off.
The grid bias is set to –45V so that no current flows without drive. As the amplitude is gradually raised, the valve starts to draw current at –42V as the peak of the input signal is just overcoming the fixed grid bias. At a greater input level, the anode current is driven higher. The X-axis shows the effective grid-cathode voltage. When the grid voltage is driven positive the current rises to a high amplitude. This particular valve is the YL-1060 dual-tetrode and the graph shows the current for one half of the valve.
If the valve must be operated in the most linear fashion the grid voltage cannot exceed 0V. Should it do so then grid current will flow and the linearity suffers. Where linearity is not such a concern, but the greatest output power with good efficiency is required, allowing the grid to become positive on the peaks of the input sinusoidal waveform leads to greater power and better efficiency. There is, however, some penalty to be paid for this choice, which will be covered later.
Perhaps it is not obvious to the reader what some of the valve manufacturer’s terminology represents. When we see the ‘CW rating’ in a data sheet, it is not the same as radio amateurs understand. ‘CW’ is short for Continuous (or Carrier) Wave and means full carrier for an indefinite time, unless the manufacturer states a time limit. This is radically different to the radio amateur meaning of Morse code, which is an intermittent form of transmission.
The typical anode current curve in Fig 3.6 highlights one of the potential problems of a high transconductance valve. Should the grid bias fail, the anode current can reach a level to cause a meltdown in the valve! If the grid bias should disappear, due to a fault, the grid voltage will rise to 0V. For an anode voltage of 800V and a Vg2 of 250V, it will try to draw about 350mA per section. This is a total anode current of 700mA and the anode dissipation will be (0.7 x 800) = 560 watts, assuming that the anode supply does not collapse under the stress. The maximum anode dissipation of the YL-1060 is 60W. (The 1060 in the part number denotes a maximum anode voltage of 1kV and 60W anode dissipation.) This is 500W more than the valve is rated for and it will expire very quickly, probably with an imploded envelope as the vacuum sucks in the softened glass!
Peak Anode Current
The peak current the valve will experience depends on the biasing condition selected and the amplitude of the driving signal. For the AF and RF linear amplifier there are three possible modes of operation. These are Class B, Class AB2 and Class AB1. For Class B the valve is biased just to cut-off and the grid voltage swings the anode current in a sinusoidal manner. For Class AB2 the anode draws a small amount of idle current and for Class AB1 the idle current is higher. Fig 3.7 illustrates the different anode current pulse for a similar input drive level.
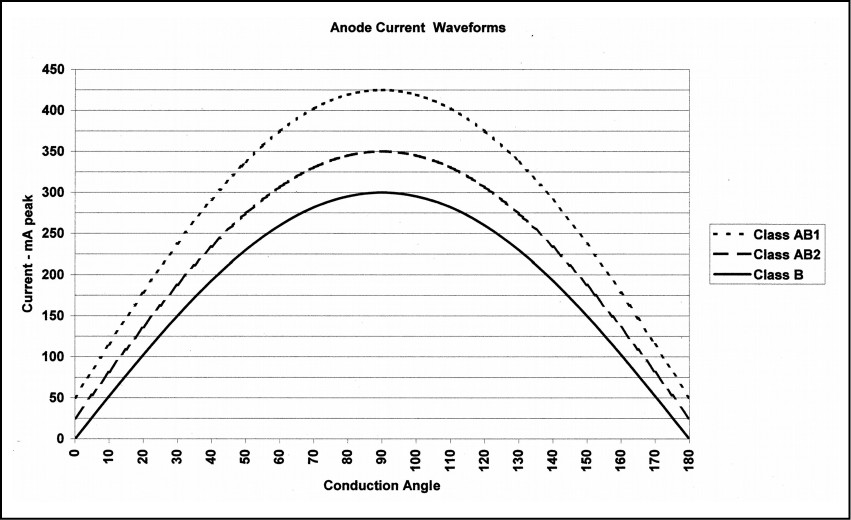
Fig 3.7: Anode current pulses for linear operation.
Class B requires the greatest drive level and the anode current starts at zero current. Class AB2 requires a little less drive level and the idle current is greater than zero. Class AB1 requires the least drive signal and the idle current is greater than Class AB2. Consequently, the peak anode current is the highest for AB1 and less for the other two modes, for the same input level of drive.
Supply Voltage Effects
Normally the high voltage supply used for the anode is a simple unregulated type, using a rectifier and a smoothing capacitor. For many applications this is acceptable. If we turn back to Figs 3.2 and 3.3 we can see that although the anode voltage can vary over a wide voltage range the curves are substantially straight lines, almost horizontal. Most anode high voltage supplies sag a bit in voltage as the current drain is increased, due to the regulation factor. For a triode valve it is the only supply voltage required, apart from the filament / heater supply. However, for the tetrode and pentode a separate lower voltage supply is required and this supply does need to be well regulated. The same applies to the control grid supply, if it is not generated by ‘self-biasing’ using the grid current.
Very often the screen grid supply is derived from the same transformer as the anode supply, using another secondary winding and rectifier components. For fixed bias supplies it is also common to use another secondary winding to derive this supply. As the anode current is usually the largest as it varies it changes the other secondary voltages. For linear amplifiers utilising tetrode / pentode valves this variation in the screen grid voltage causes additional non-linearity, as well as any inherent non-linearity due to the non-perfect transconductance curves. If linearity is critical in these amplifiers voltage stabilisers are required for both the screen grid and control grid supplies to hold them within close limits. This topic will be covered in more detail later.
The screen grid in a tetrode / pentode valve has almost as much control on the anode current as the control grid. Therefore, if the screen grid voltage wobbles around as the anode current varies it will upset the operation.

