The electronics had been installed in the field cutout beneath the platform. We used an Arduino Uno and a 5v battery to electricity the sensors, Bluetooth, and control good judgment. A 3s LiPo battery changed into used to strength the automobiles.

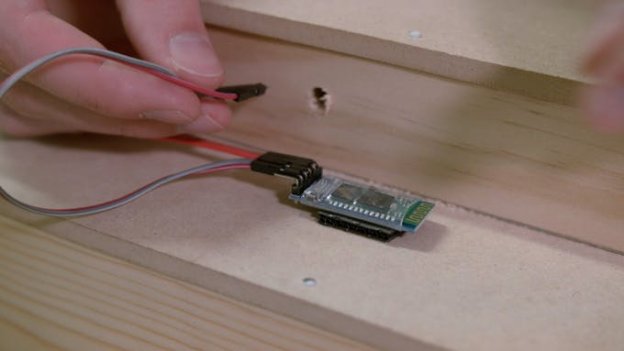
A HC-05 Bluetooth module was established at the the front of the platform for better variety. The relaxation of the components such as a L298N motor driving force, PAM-7Q GPS, and HMC6883L compass were installed inner and linked to the Arduino thru the breadboard.
The compass works with I2C, so we linked the SLC and SDA pins to A5 and A4 respectively. The rest of the pins were linked thru virtual I/O. For more information on how we related the wires, see the diagrams provided within the schematics section under.
The vehicles were powered by way of drilling holes through the platform and attaching them the L298N motor driving force board. The 3s LiPo turned into linked as the main power source and we tied the ground together with the Arduino electricity source for manage good judgment.
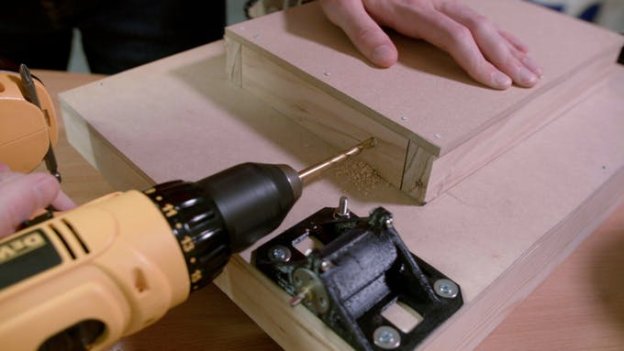
the subsequent image indicates what everything appeared like once it was related inside the electronics field.

