Книга: Универсум. Общая теория управления
Назад: 6.2. Режимы управления
Дальше: 6.4. Характеристики систем управления
6.3. Гибкость и устойчивость и управления
Скорость перехода системы с одного режима работы на другой определяет гибкость рассматриваемой системы управления.
Одно из наиболее распространённых и традиционных определений понятия «гибкость» подразумевает «свойство алгоритма, определяемое возможностью его адаптации к изменениям входной информации без изменения решаемой задачи» [53, 69]. С универсумной точки зрения понятие «гибкость» определяется способностью системы в зависимости от конкретного набора входных воздействий S обеспечивать своевременное переключение между различными режимами (схемами) управления для получения необходимой реакции R. Это переключение организует высшая освоенная данным универсумом страта управления. В практическом аспекте гибкость – это набор параметров (скорость, энергопотребление, импульсная мощность и др.), определяющих способность системы к переключению между режимами управления с целью сохранения устойчивости функционирования во внешней среде.
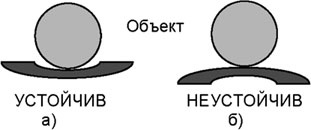
Рис. 6.9. Устойчивость объекта на поверхности различного типа
Что касается понятия «устойчивости», то, как известно, в большинстве отраслей науки и в технике понятие «устойчивость» построено на основе присущей объекту тенденции возвращаться к исходному режиму существования по всем (или по части)
параметрам, характеризующим его поведение, после того, как возмущающее воздействие, вызвавшее первоначальное отклонение параметров, будет снято. Периодические колебания приведут систему «шар-тарелка» в точку равновесия – устойчивости (рис. 6.9а). Отсутствие такой тенденции или наличие противоположной тенденции определяется как «неустойчивость». В этом случае отклонение шара от точки равновесия лишит систему «шар-тарелка» устойчивости (рис. 6.9б). то есть, в классической точке зрения устойчивая система просто должна «отработать» влияние внешнего фактора и вернуться на расчётную траекторию. Неустойчивая система самостоятельно возвратиться на заданную траекторию после снятия внешнего воздействия не может.
Следует также отметить, что традиционный подход обходит молчанием вопрос возможных отклонений траектории движения системы в случае отсутствия внешнего воздействия (наличия предельно ровной поверхности «тарелки»), ограничивая ответ некоторыми случайным и несущественными «девиациями».
Очевидно, что различные схемы управления для одних и тех же объектов в одних и тех же условиях обеспечивают как различную гибкость реагирования на возмущающие воздействия, так и различный максимально достижимый уровень устойчивости и качества управления.
Более полное раскрытие термина «устойчивость управления» требует рассмотрения различных траекторий достижения системами целевой функции в связи с их фазовыми характеристиками. Вопрос устойчивости процесса управления тесно связан с алгоритмикой работы схем, по которым оно осуществляется, с соотношением фазовых величин ОС восходящего и ПС нисходящего U-потока, образующих внутренние интегративные U-потоки положительной обратной связи (ПОС) и отрицательной обратной связи (ООС). В модели и терминологии импульсных и колебательных процессов этим связям будут соответствовать определённые траектории поведения системы.
Работа программной схемы (рис. 6.10а), реагируя на строго определённые входные состояния системы S, «вмешивается» в процесс управления преимущественно однозначным, дискретным способом. На траектории поведения системы чаще всего это может отражаться как «точка перелома». После осуществления программной реакции R система переходит в режим ожидания очередного однозначно определённого состояния S для выдачи соответствующей ему реакции R. Реакция на состояния системы, не предусмотренные программой, не осуществляется, балансный режим выполняется только в узких рамках набора запрограммированных SR-пар типа «Известный стимул – Соответствующая реакция» (УФУ-1).
Работа адаптивной схемы (рис. 6.10б) в классическом варианте описания поведения объекта при внешнем воздействии на него может быть представлена в виде некоторого отклонения от процесса идеального поведения с последующим возвращением на траекторию, близкую к идеальному режиму управления. Колебательный процесс траектории поведения объекта вокруг заданной траектории соответствует поведению шара в тарелке. Именно этот процесс классической теории управления признаётся критерием устойчивого поведения систем «по Ляпунову» (УФУ-3). Адаптивная схема реагирует на внешние воздействия с небольшим фазовым запаздыванием, она охвачена менее глубокой ООС.
Работа «межеумочной» (нулевой) схемы (рис. 6.10в) соответствует примерному равенству фаз ОС и ПС и, следовательно примерно нулевым значениям ООС и ПОС, что может привести систему в неустойчивый режим со случайными девиациями траектории поведения.
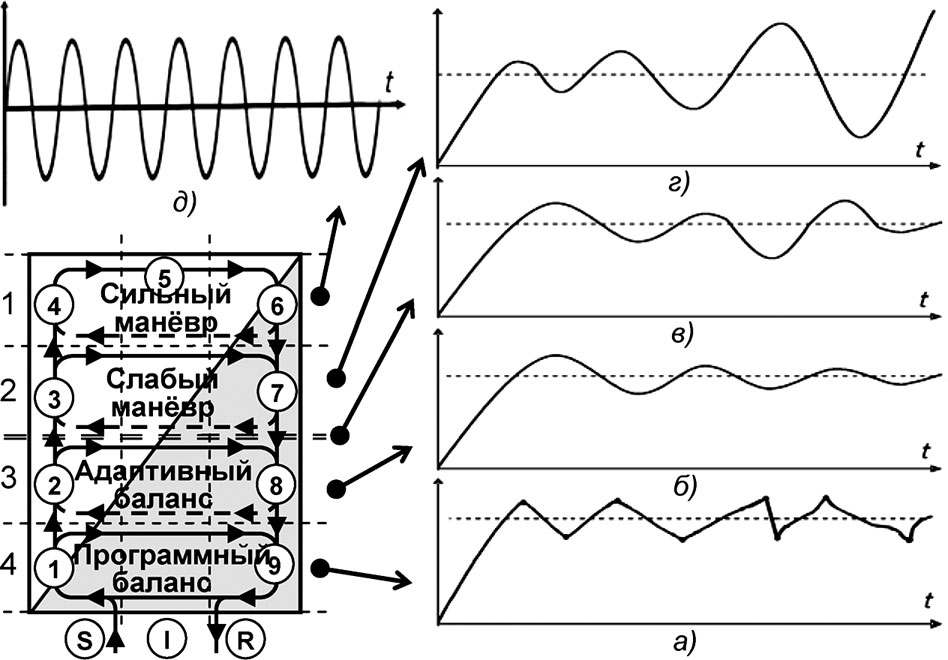
Рис. 6.10. Соответствие U-стратификации режимам управления и траекториям колебательных процессов
Работа предикционной схемы (рис. 6.10 г), осуществляющей слабый манёвр, соответствует неустойчивому варианту поведения шара в тарелке классической теории управления. С универсумной же точки зрения именно возможность «амплитудной раскачки» процесса управления позволяет системе подобрать новый, необходимый для «выживания» адаптационный вариант реакции на внешние воздействия (УФУ-5).
Работа прогностической (интеллектуальной) схемы (рис. 6.10д в электронной аналогии соответствует режиму U-потока OC с большим опережением фазой ПС, что соответствует сильной ПОС, способной перевести систему в режим автогенерации и/или близкий к автогенерации колебаний. Эта схема обладает максимальной устойчивостью, поскольку в максимально полной мере способна обеспечить вероятностную предсказуемость траектории поведения системы. Расчёт параметров «точки будущего» траектории системы, находящейся в состоянии автогенерации не представляет затруднений.
Траекторное описание термина «устойчивость» позволяет сделать ряд выводов, связанных с тем, что восходящий U-поток ОС имеет источником стимулы S, воздействующие на систему, а U-поток ПС определяет реакцию R системы на эти воздействия (рис. 6.11).
В универсумном описании программная и адаптивная схемы управления системой соответствуют балансировочному режиму работы.
Балансировочный режим – это ситуация, когда описывающий траекторию движения системы вектор состояния колеблется относительно неизменного положения в подпространстве контрольных параметров. Это тактика решения задач, реализуемая в рамках определённой стратегии посредством адаптационного и программного режимов работы. Программный режим обеспечивает решение стандартных оперативных действий, принимаемых в рамках конкретных тактических задач. Он также может использоваться и на «надёжных» участках траекторий, на которых объект достаточно хорошо застрахован от нежелательных внешних воздействий. Для работы системы в балансировочном режиме достаточно одного комплекта векторов управления (целей, состояния и ошибки управления), значения которых изменяются в определённых, достаточно небольших пределах. Выход траектории (вектора ошибки) за пределы допустимых величин требует от системы способности осуществления слабого манёвра.
Для проведения манёвров, представляющих предикционную и интеллектуальную схемы управления, необходимо уже не менее двух комплектов, отличающихся друг от друга ранжированием и/или набором целей векторов управления.
Рассмотрим устойчивость этих схем более подробно с точки зрения фазовых характеристик U-потоков различных типов связей.
1) Программная схема управления (контур 1–9 максимально сдвинутой «в прошлое» фазы ООС), не используя в качестве обратной связи динамические параметры внешней среды, максимально устойчива по запрограммированным для отработки воздействиям. Как максимально глубокая ООС она работает по жёстко заданной программе, конструктивно-механически. Реализацию накопленного в прошлом опыта может представлять, например, форма корпуса, стабилизирующая объект (корабль, самолёт) на заданном курсе или в заданном пространстве параметров даже без непосредственного управляющего воздействия.
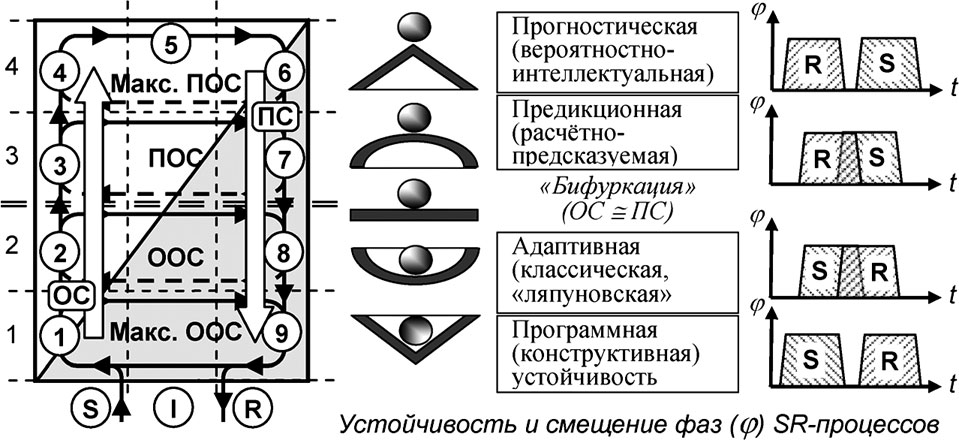
Рис. 6.11. Устойчивости и фазовые параметры систем управления 4U
В программном режиме выработка системой алгоритмики реакции R значительно отстаёт от появления инициирующих стимулов S. то есть, любой из возможных стимулов S вместе с алгоритмикой отработки в виде реакции R введён в работающую систему заранее, до возникновения в рабочем режиме. Для модели отработки колебательных и/или импульсных процессов можно сказать, что фаза R отстаёт от фазы S (или, что эквивалентно, фаза S опережает фазу R). Поскольку программа работы закладывается в систему заранее, на основании прошлого опыта взаимодействия подобных систем с внешней средой, то можно сказать, что программная схема управления охвачена почти 100-процентной ООС.
Программная система управления использует только соответствующие «самой себе» программные (подпрограммный, мультипрограммный и т. п.) режимы управления.
2) Адаптивная схема управления (контур 1–2–8–9), в которой фаза ОС, инициируемая стимулом S, немного отстаёт от реакции R в виде ПС (что эквивалентно ситуации, когда ОС незначительно отстаёт от ПС). Это оказывает на траекторию движения системы стабилизирующее влияние. Как и в программной схеме, любой из возможных стимулов S вместе с алгоритмикой его отработки в виде реакции R введён в работающую систему заранее, ещё до возникновения, но выбор конкретного варианта реакции осуществляется системой динамически, в процессе работы. Включение в качестве обратной связи динамических параметров внешней среды повышает степень устойчивости системы к влиянию внешних факторов. Эта схема управления по мере необходимости на отдельных участках траектории может использовать программный режим управления.
3) Предикционная схема управления (схема «предиктор-корректор, контур 1–2–3–7-8–9), использующая ПОС и учитывающая в структуре своей ОС ранее «просчитанные», расчётные параметры находящейся во внешней среде цели, имеет способность совершать слабые манёвры и гораздо бо́льшую устойчивость в смысле расчетной предсказуемости (предикции). В этой схеме фаза ПС несколько опережает фазу ОС, что повышает «избирательность» системы.
Слабый манёвр – это управление траекторией движения системы, основанное прогностике, поддающееся алгоритмизированному математическому расчёту в ограниченном пространстве параметров. По мере необходимости на отдельных участках траектории может использовать программно-адаптивный и программный режимы управления. Можно сказать, что слабый манёвр – это переход системы из одного балансировочного режима в другой. Он требует переключения системы с одного вектора управления, работающего в балансировочном режиме на другой вектор, также обеспечивающий балансировочный режим, но в другом диапазоне изменений вектора ошибки. Разница между этими двумя векторами ошибок определяется переранжированием нового вектора целей, определяемого необходимостью учёта в нём расчётной составляющей, включающей прогностику поведения цели (например, величину первой производной траектории). Можно сказать, что это траектория реализации стратегического плана достижения цели. Глубина прогностики определяется возможностью расчёта траектории, осуществляемой в пространстве видимости цели – до условной «линии горизонта». При выходе же цели за границы видимости управление системой может осуществляться только по интеллектуальной схеме управления, способной осуществлять сильные манёвры.
Предикционная схема реагирует на воздействия с небольшим фазовым опережением (просчитывая и задавая траекторию заранее), поэтому можно сказать, что предикционная схема управления охвачена ПОС. Именно наличие ПОС позволяет предикционной схеме осуществлять «переранжирование» прежних критериев оценки сложившейся ситуации и производить «перенацеливание» системы на новую траекторию движения, продолжающую выполнение целевой функции.
В предикционном режиме выработка реакции R немного опережает появление инициирующих стимулов S. Любой из возможных стимулов S вместе с алгоритмикой его отработки в виде реакции R может быть просчитан работающей системой наперёд, ещё до возникновения, но выбор конкретного варианта реакции осуществляется системой в процессе работы. Для модели отработки колебательных и/или импульсных процессов можно сказать, что фаза R немного опережает фазу S.
Понятие «предикционная устойчивость» управления объектом предусматривает алгоритмику управления в смысле расчётной предсказуемости поведения в определённой мере под воздействием внешней среды и внутренних изменений. В этом случае не только при поступлении возмущающих факторов, но и при изменении вектора целей (координат цели) произойдёт не «промах», весьма вероятный в случае управления по адаптивной схеме управления, а корректировка вектора цели (координат цели) и система опережающим образом изменит траекторию своего движения, сохраняя «в поле зрения» конечную цель.
4) Интеллектуальная схема управления (управление по ПФУ) характеризуется тем, что фаза ПС может значительно опережать фазу ОС и в зависимости от амплитуды может обеспечить не только гибкую «избирательность» системы, но и перевести её в режим «самостоятельной работы» – авто/генерации. Интеллектуальная система управления – единственная схема, способная совершать сильные манёвры, обеспечивая режим работы по предсказуемости в полном смысле этого слова.
Сильный манёвр – это управление траекторией движения системы, основанное на способности интеллектуальных (самоорганизующихся) систем к прогностике в широком пространстве параметров, не поддающееся формальной алгоритмизации. Эта схема управления может использовать («включать» по мере необходимости) любой режим управления – совершать слабые манёвры, переходить в адаптивный или в программный режим управления. Именно интеллектуальный субъект управления и организует алгоритмику работы всех схем. Программная, адаптивная и предикционная схемы в определённом для них диапазоне параметров могут работать самостоятельно, без вмешательства интеллекта, но при выходе системы в новое пространство параметров управление системой должен брать на себя интеллект – самоорганизующаяся суперсистема, способная порождать качественно новые ИМ-модули описаний ОЯП внешнего мира.
Следует заметить, что сильный манёвр отличается от слабого не столько «крутизной» траектории, сколько принципами расчёта вектора ошибки (управления), который соответствует различным типам схем управления. Только интеллект способен обеспечить произвольно глубокую прогностику траектории движения цели (например, по второй, третьей и производным более высоких порядков) при её потере для непосредственного наблюдения и/или при осуществлении целью «противоударного» манёвра. При возобновлении идентификации (повторном обнаружении) цели интеллектуальная схема может вернуться в режим предикции или в балансировочный режим.
Сильный манёвр – это возможность осуществления точной вероятностной прогностики, основанной на работе самоорганизующихся систем в широком пространстве параметров, не всегда поддающаяся формальной алгоритмизации, поскольку часть параметров может находится «за горизонтом» видимости. Самый точный термин для описания такой траектории поведения объекта – выработка концепции достижения цели как «произвола».
В прогностическом режиме выработка системой алгоритмики реакции R значительно опережает появление инициирующих стимулов S. то есть, практически любой из возможных стимулов S вместе с алгоритмикой его отработки в виде реакции R просчитан работающей системой наперёд, ещё до возникновения. Для модели отработки колебательных и/или импульсных процессов можно сказать, что фаза R опережает фазу S.
Понятие «устойчивость управления» объектом в смысле предсказуемости наиболее вероятного поведения в определённой мере под воздействием внешней среды и внутренних изменений предусматривает алгоритмику управления объектом именно по прогностической (интеллектуальной) схеме.
Включение в иерархию систем управления понятия «интеллектуальная система» позволяет уменьшить степень субъективизма исследователя в оценке качества моделирования и управления, более точно связав тип системы с теми режимами, которые она может поддерживать. Поскольку организация интеллектуальной системы основана на виртуальных структурах, можно сказать, что различение в понимании принципов работы систем реорганизации ПРИОРИТЕТОВ (схема предикции) от систем изменения внутренней СТРУКТУРЫ (интеллектуальная схема) векторов управления позволяет точно разграничить сущность понятий слабого и сильного манёвра.
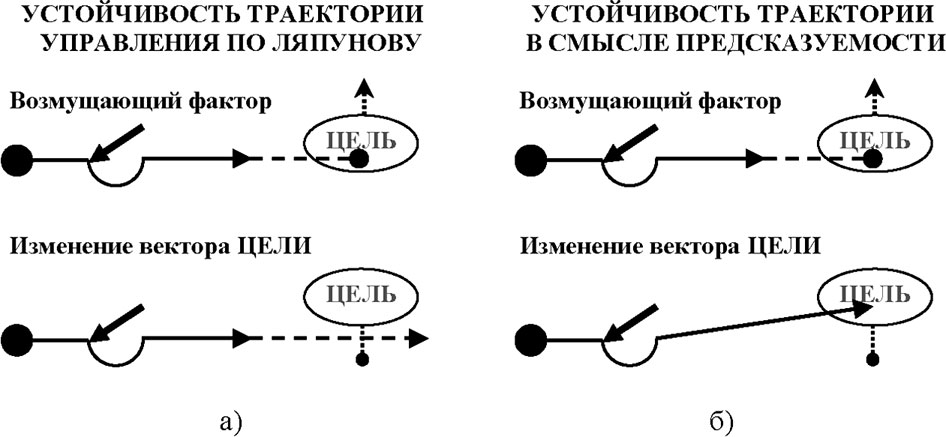
Рис. 6.12. Стандартные траектории поведения систем. а) балансировочный режим; б) режим маневрирования.
Сравнение алгоритмики работы балансировочных и маневровых схем показывает, что после возникновения некоторого возмущающего внешнего фактора, вызывающего изменение траектории движения системы как балансировочные, так и маневровые схемы имеют примерно равные шансы выполнения своей целевой функции. И та, и другая схемы могут примерно с одинаковым успехом достичь цели, если она не изменила свою траекторию поведения. В случае же определённого изменения координат движущейся цели балансировочная схема, сохраняя заданный вектор цели, скорее всего «промахнётся» (рис. 6.12а), а вот маневровая схема, совершив сильный или слабый манёвр, обеспечит более высокую способность «попадания в цель» (рис. 6.12б).
Следует отметить, что в современных технических системах принцип использования ПОС, т. е. маневровых схем, находит всё более и более широкое применение. Например, российские истребители СУ по аэродинамическим характеристикам являются неустойчивыми объектами, т. е. объектами, конструктивно включающими в свою аэродинамику ПОС. Поэтому при выполнении обычного полёта система управления, компенсируя ПОС, принудительно держит самолёт в адаптационной алгоритмике работы, при выполнении же фигур высшего пилотажа и манёвров ПОС используется как дополнительный фактор, резко повышающий манёвренность истребителя. С точки зрения вероятности достижения целевой функции устойчивость маневровых схем гораздо выше, чем балансировочных.

Рис. 6.13. Соответствие универсумной типологизации различным описаниям
Таким образом, типология систем управления, их устойчивость и фазовые характеристики связаны друг с другом вполне определённым образом (рис. 6.13), что позволяет определить четыре базовых типа устойчивости супер/систем класса 4U:
– Программную (конструктивно-механическую);
– Адаптивную (классическую, «ляпуновскую»);
– Предикционную (расчётно-предсказуемую);
– Прогностическую (вероятностно-интеллектуальную).
В классификации 2U можно говорить не только о балансировочном режиме для нижних страт и режиме манёвров для верхнмх, но и о пассивном поведении нижних универсумных страт и активном верхних; управляемости нижних страт и самоуправляемости верхних и так далее. В более широком смысле можно обратить также внимание на тот факт, что именно между адаптивной и предикционной системами проходит граница между растительным и живым (животным) миром: живое отличается от растительного именно способностью к предикционному расчёту и прогностике.
Универсумное описание максимально уточняет требования, предъявляемые к режимам и манёврам, осуществляемым различного типа системами управления и к траекториям, описывающим поведение этих систем в процессе управления. Так, сложные технические системы, например, автомобиль, самолёт, тот же российский Луноход или американский Марсоход могут работать в одной из трёх алгоритмик – программной, адаптивной (балансировочный режим удержания на курсе) и даже по схеме «предиктор-корректор» (слабый манёвр – уход от некоторой неожиданной помехи на курсе). Это, конечно же, не означает, что такие системы как автомобиль или самолёт наделены интеллектом. Они – воплощение Интеллекта, интегранты, управляемые суперсистемой, но не сам Интеллект. По схеме «предиктор-корректор» Марсоход может объехать скатившийся с откоса камень (совершить слабый манёвр), но если он неожиданно наткнётся на яму или другое препятствие, то он запрограммировано (что было сделано заранее Интеллектом) остановится, ожидая оперативного вмешательства Интеллекта (сильного манёвра) со стороны Центра управления.
Отдельного внимания заслуживает «межеумочная» граница перехода систем адаптивного управления в системы предикционного класса, в которых соблюдается мера примерного равенства фаз и амплитуд материальных и информационных составляющих U-потоков прямой и обратной связи. Такая «плавающая» случайным образом фаза может сделать систему предельно чувствительной к самым минимальным дифференциациям фазовых, амплитудных и частотных характеристик U-потока. В какой-то момент времени получить случайное преимущество может ОС. Тогда система будет работать по адаптивной схеме (или даже «застынет» в программном режиме работы). В другой момент времени преимущество может получить ПС и система может обнаружить свойства избирательности (и даже перейти в режим автоколебаний). Это эквивалентно нахождению системы в состоянии случайных перетоков U-потока по каналам отрицательной и положительной связи. Траектория поведения такой системы в обычном масштабе координат трудно предсказуема – «неравновесна», что дало некоторым философским школам повод для введения в понятийный оборот якобы нового природного явления – «порядка, возникающего из хаоса», чаще всего связываемого с понятием синергетики «точка бифуркации».
Чаще всего примитивное понимание зависимости качества от сложности структурных отношений ОЯП проявляется в признании современными философами некоего «синергетического эффекта», под которым при выполнении людьми некоторых совместных работ подразумевается появление из неоткуда некой волшебной (а реально – не учитываемой ранее) энергии, разумно помогающей людям в осуществлении их желаний. Кроме того, понятие бифуркации используется в качестве веского аргумента подтверждения «тотально конструктивной роли случайности и хаоса», распространяемого на множество «труднообъяснимых», но вполне соответствующих описанию хаоса, турбулентности и прочих завихрений в смысловом наполнении гуманитарных дисциплин – философии, социологии, политологии и в других науках.
В синергетике убедительно показано, что современная наука имеет дело с очень сложноорганизованными системами разных уровней организации, связь между которыми осуществляется через взаимопереходы хаоса и гармонии. Отличие синергетического взгляда от традиционного диалектического, очевидно, состоит в переходе от исследования простых систем к сложным, от закрытых к открытым, от линейности к нелинейности (сложным траекториям развития), от равновесных форм к неравновесным, от господства стабильности к господству нестабильности [29, 24].
Популярен ещё один термин – «синергетический эффект», под которым чаще всего подразумевается волшебный результат взаимодействия двух и более факторов, при котором их суммарное действие превосходит эффект каждого отдельного компонента в виде их суммы. Это укоренившееся в научном сленге словосочетание является лишь бледной тенью более подробного и логичного описания эффекта, сделанного ещё в начале XX века А. А. Богдановым.
…загадка решается просто – надо только представить организуемые активности вместе с теми сопротивлениями, которые они преодолевают…Итак, организованное целое оказалось на самом деле практически больше простой суммы своих частей, но не потому, что в нем создавались из ничего новые активности, а потому, что его наличные активности соединяются более успешно, чем противостоящие им сопротивления.Наш мир есть вообще мир разностей; только разности напряжений энергии проявляются в действии, только эти разности имеют практическое значение. Там, где сталкиваются активности и сопротивления, практическая сумма, воплощенная в реальных результатах, зависит от способа сочетания тех и других; и для целого эта сумма увеличивается на той стороне, на которой соединение более стройно или «гармонично», заключает меньше «противоречий». Это и означает более высокую организованность [7].
Для установления более точного универсумного соответствия между схемами и системами управления, траекториями их поведения и устойчивостью следует рассмотреть границы областей устойчивого, неустойчивого, допустимого, недопустимого и других видов управления, рассматриваемых различными научными школами (рис. 6.14).
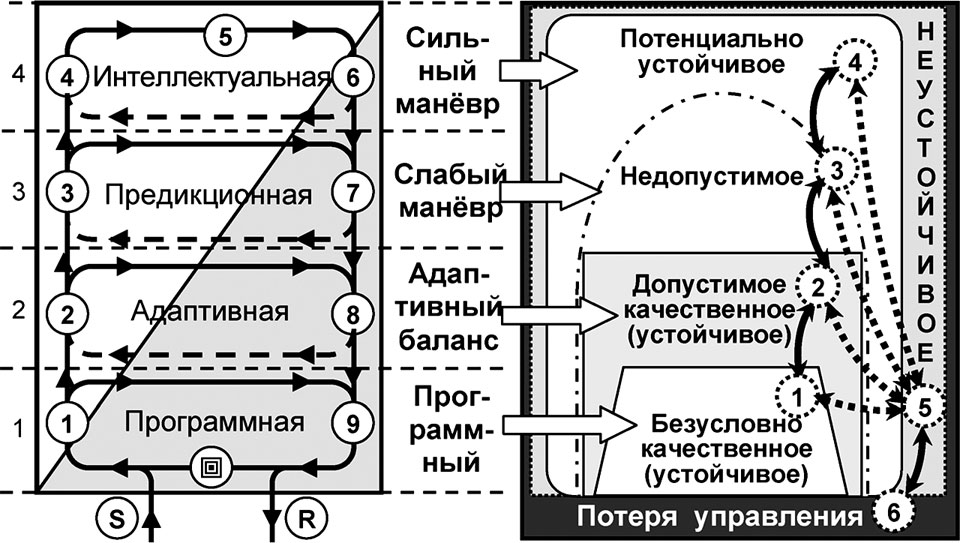
Рис. 6.14. Стандартные области устойчивость систем 4U
Очевидно, что высшие универсумные уровни (4) и (3) способны обеспечивать работу систем в режиме самоуправления и в них необходимо учитывается влияние положительной обратной связи, т. е. это – режим манёврирования. Уровням (2) и (1) более характерны исполнительские, стабилизирующие, пассивные функции, т. е. они работают под влиянием отрицательной обратной связи, в балансировочном режиме управления. Из этой стратификации легко вывести её соответствие ряду граничных состояний, представляющих следующую иерархию:
1) Безусловно качественное (классическое устойчивое) управление (цифра 1 в точечном круге) обеспечивается в области, где система управляется по закону однозначной ответной реакции на определенное входное воздействие. Пример: нажал водитель (СУ) на тормоз (ПС) – машина (ОУ) затормозила (ОС), повернул руль – машина осуществляет поворот. Это ни что иное, как алгоритмика работы программной схемы управления;
2) Допустимое качественное (классическое устойчивое) управление. Это область (цифра 2) плавной подстройки параметров (векторов) управления при каких-либо отклонениях от заданного режима работы. Пример: попало колесо в выбоину на дороге – водитель (СУ) легко довернёт руль (ПС) и машина (ОУ) продолжит движение в нужном направлении (ОС). Это – балансировочная алгоритмика работы адаптивной схемы управления;
3) Потенциально устойчивое (предикционное, вариабельно недопустимое и допустимое) управление. Это область (цифра 3), где отсутствие корректного ситуации предикционного расчёта может привести систему в устойчивое недопустимое состояние, с последующей аварией, катастрофой, крахом. С другой стороны, система, попавшая в недопустимое состояние, может выйти из него, перейдя в качественно другое, уже допустимое устойчивое состояние (2) посредством осуществления адекватного реалиям окружающей среды предикционного расчёта (3). Пример: отвлёкшийся на поиск в кабине нужного предмета водитель (СУ) выехал на обочину, тряска машины увеличилась (ОС), но водитель вовремя успевает вывести машину на дорогу (ПС), после чего машина (ОУ) продолжает двигаться в нужном направлении (ОС). Это – слабый манёвр предикционной схемы управления. Приоритет «поиск предмета» быстро (гибко) меняется на «выравнивание автомобиля». При этом выход за пределы допустимого управления в область потенциально устойчивого управления (4) не обязательно означает возникновения аварийной ситуации, но предупреждает о возможности дальнейшего перехода объекта управления в область неустойчивости (5). Попадание в область недопустимого управления – верный признак близкого наступления аварийной ситуации и недвусмысленный сигнал о настоятельной необходимости перехода на более высокий (т. е. более устойчивый) уровень управления, способный перевести систему в потенциально устойчивое состояние;
4) Потенциально устойчивое (интеллектуальное) управление (цифра 4) – это высший уровень управления, осуществляющий не только слабые, но и сильные манёвры, способные «спасти систему» в самых сложных ситуациях. Так, маневрирование водителя на скользком участке дороги посредством умелого и «нестандартного» управления рулём и тормозами способно предотвратить дорожно-транспортное происшествие в, казалось бы, безнадёжной ситуации. Конечно же, интеллектуальный уровень управления нужен в первую очередь для недопущения возможности попадания в аварийные ситуации. Именно он «включается», например, в виде решения водителя о необходимости снижения скорости движения на сложных участках дороги.
5) Неустойчивое управление. Если в области как недопустимого (3) или любого другого режима управления (1, 2) перехода на более высокий уровень управления (4) нее произошло, то система попадает в область неустойчивого управления (цифра 5). Так, например, если заснувший за рулём водитель (СУ) выезжает на обочину и, не ощущая тряски, продолжает жить в сновидениях, то машина (ОУ) сваливаться в кювет. Это – переход в область потери управления (6). В терминах динамического программирования происходит «срыв управления». Если водитель (4) всё же просыпается, то может и успеть вывести машину на дорогу (ПС). Это – возможность осуществления (или неосуществления) сильного манёвра в интеллектуальной схеме управления (4). Для интеллектуальной системы управления алгоритмика выхода из области неустойчивости (5) такова: управленец должен последовательно переводить объект в потенциально устойчивое состояние (4), возможно даже при этом используя область недопустимого управления (3). затем осуществить перевод в допустимое (2) и, наконец, в устойчивое (1) состояние. Чем более качественная интеллектуальная схема управления будет задействована в этом процессе, тем более надёжным и быстрым будет переход объекта в режимы устойчивого управления. Способность к устойчивому управлению растёт с повышением Меры понимания интеллектом законов Внешнего мира.
6) Потеря управления. Попадание траектории движения системы в область потери управления (цифра 6) означает невозможность дальнейшего управления объектом. Пример: заснувший за рулём водитель (СУ) сваливает машину (ОУ) в кювет и опрокидывается. Это вариант отсутствия своевременных управляющих воздействий, способных изменить ситуацию. В терминах динамического программирования это означает невозможность после факта «срыва управления» достижения максимально качественного состояния процесса.
Ещё один сокращённый пример управления по зонам устойчивости из области авиации:
(1) – полёт самолёта по курсу на «автопилоте»;
(2) – отключение автопилота и небольшая «перестройка» курса самолёта на новый радиомаяк;
(3) – изменение курса и эшелона полёта после поступления сообщения о грозовых облаках – облёт грозы;
(4) – решение командира воздушного судна о возвращении на аэродром вылета ввиду резкого изменения погодных условий;
(5) – попадание в зону высокой турбулентности, вулканической активности (в облако шлейфа извержения) и т. п.;
(6) – авария или катастрофа вследствие выхода из строя систем управления полётом, разрушения корпуса, крыльев и т. п. причин.

Рис. 6.15. Оптимизация уровней и областей управления 4U
При рассмотрении вышеописанных областей в виде вложенных друг в друга множеств, следует обратить внимание на порядок перевода системы из одного состояния в другое. Устойчивое (безусловно качественное) управление возможно осуществлять только в области допустимых (качественных) видов управления. Если рассматриваемая система поддерживает только часть схем управления, например, не имеет возможности перехода в режим потенциально устойчивого управления, то область пространства управления будет сужена. Система с полным функциональным набором (от безусловно качественного до потенциально устойчивого управления) позволяет говорить о возможности устойчивого управления в любом из режимов – как в программном и балансировочном, так и при работе по схеме «предиктор-корректор» и при интеллектуальном управлении.
Области устойчивого (т. е. допустимого и качественного) управления можно назвать нормальными режимами работы систем управления, потенциально устойчивый и недопустимый – рискованными, поскольку они имеют повышенные шансы перехода в аварийный и неустойчивый режим работы. С другой стороны, очевидно, что присущая потенциально устойчивым областям определённая не/предсказуемость – верный критерий развитости систем, позволяющий достичь максимальной устойчивости объекта управления.
Аварийный режим характеризуется попаданием объекта управления в область воздействия параметров, на работу в которых он не рассчитан. В каком-то пространстве аварийных параметров система иногда ещё может работать, но чаще всего авария приводит систему в неустойчивое состояние. Вывод системы из аварийного состояния – это проявление гибкости, выраженной в возможности оперативного применения схем управления более высокого порядка. Так, для сохранения работоспособности программной схемы (системы, режима) управления её необходимо подчинить адаптивной схеме. Если это решение не приносит успеха, то необходимо продолжить реорганизацию: адаптивную схему следует включить в состав предикционной, способной совершать слабые манёвры, а для сохранения жизнеспособности предикционной системы придётся её включать в алгоритмику работы интеллектуальной схемы управления, способной совершать сильные манёвры.
Верным признаком необходимости повышения степени «интеллектуальности» любых систем (стрелка 1–2, рис. 6.15а) является даже единичный факт их вхождения в аварийный режим работы, за которым в любой момент может последовать переход в область неустойчивого управления, а затем и его потеря. Такую систему, конечно же, необходимо «интеллектуально» усилить, но из этого вовсе не следует, что следует постоянно и всегда использовать только интеллектуальные схемы управления, поскольку каждая из схем, имея свои недостатки, имеет также и свои преимущества, и оптимальные для себя области применимости.
Так, использование интеллектуального потенциала (1) для выполнения работ, например, в области допустимого качественного управления (3) расточительно и нерационально. Такая система требует «упрощения», т. е. снижения уровня организации управления.
На примере процессов управления предприятием (стрелка 1–2–3, рис. 6.15б) это означает, что процесс управления (1) некоторыми стратами и конструктами система (подразделением, отделом, цехом) можно осуществлять даже без использования креативных профессионалов (2), достаточно ограничиться людьми (3), знающими необходимые должностные инструкции (т. е. работающими в адаптивном режиме управления).
Также, в соответствии с этим подходом, например, по Мере ослабления интеллектуальных и физических возможностей человек, достигший или близкий к пенсионному возрасту, может постепенно переводиться на выполнение менее трудоёмких работ. По мере старения он обладает всё меньшей гибкостью и запасом устойчивости, поэтому нагрузка и сложность выполняемых им работ должна снижаться. С точки зрения частотных характеристик высвобождение запаса устойчивости в данном случае означает освобождение от работы элементов универсума, работающих в более высокочастотном диапазоне. Их можно переориентировать на решение других, более сложных задач.
Конечно же, как в том, так и в другом случае реорганизуемые системы должны сохранять способность выполнения целевых функций.
Назад: 6.2. Режимы управления
Дальше: 6.4. Характеристики систем управления

