Книга: Универсум. Общая теория управления
Назад: 6.1. Векторы управления
Дальше: 6.3. Гибкость и устойчивость и управления
6.2. Режимы управления
Управление любыми процессами является отработкой, реакцией системы на возникающие во внешней среде не/благоприятные воздействия, случайные внешние и внутренние ошибки («сбои», «отклонения»), а также на скрупулёзно учитываемые благоприятные стимулы, факторы и ситуации («подарки судьбы»).
Для любого протекающего процесса это означает, что в зависимости от воздействия на систему параметры процесса будут в ту или иную сторону отклоняться от идеального режима, описывая определённые траектории, вполне поддающиеся универсумной классификации.
В соответствии с алгоритмикой обработки информации в векторах управления общая траекторика работы всех стратификационных уровней класса 4U представляет следующий порядок вложенности (рис. 6.6):
– траектория балансово-программного режима, предусматривающего жёстко ограниченный набор входных состояний при неизменности вектора целей;
– траектория балансово-адаптивного (адаптационного) режима, предусматривающего возможность «гибкого» изменения числовых значений вектора состояния при неизменности вектора целей;
– траектория «слабого манёвра», являющаяся изменением ранжирования элементов в векторах управления;
– траектория «сильного манёвра», представляющая переопределение целевых функций векторов управления;
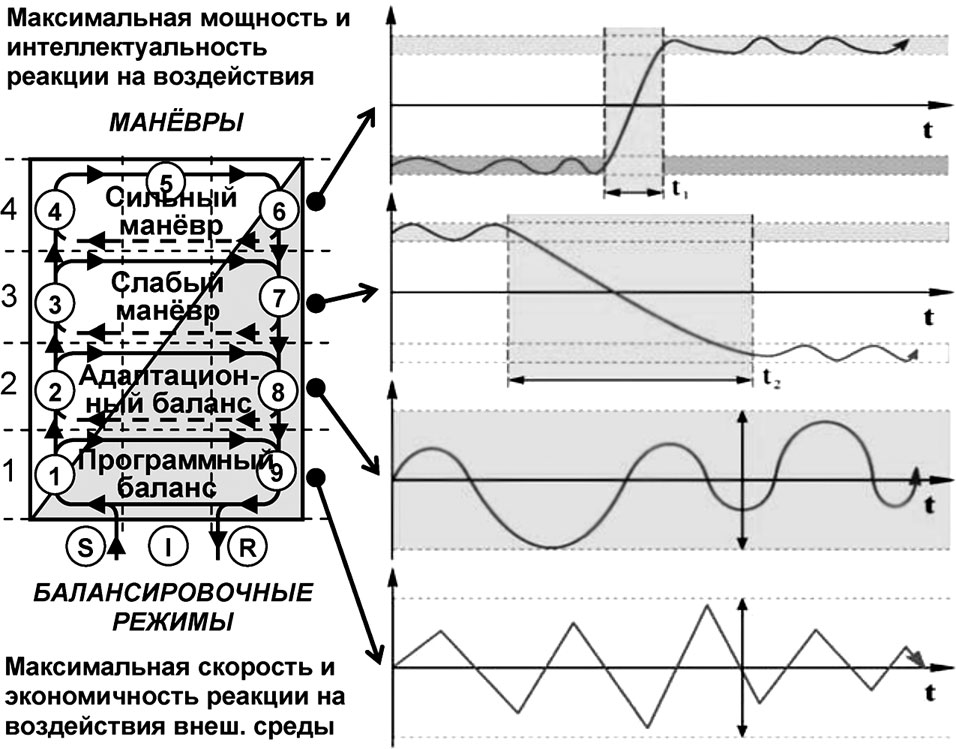
Рис. 6.6. Соответствие U-стратификации траекториям режимов управления
Можно рассмотреть работу этих режимов на совокупной сравнительной схеме (рис. 6.7).
Программный режим (∆t1, рис. 6.7) имеет возможности подстройки системы в самом узком диапазоне (d1) внешних воздействий, адаптивный режим расширяет способности системы (диапазон d2) без изменения иерархического порядка элементов векторов управления (отклонения входят в диапазон «Ранжирование векторов № 2») и без смены целевой функции (нижняя половина рисунка «Целевая функция № 1»).
Работа системы в режиме слабого манёвра (∆t3, точки траектории от А до В) предусматривает изменение порядка расположения элементов векторов управления («Ранжирование векторов № 2» меняется на «Ранжирование векторов № 1»), но также производится без смены целевой функции («Целевая функция № 1»). При этом диапазон отрабатываемых системой внешних воздействий (d3) за счёт включения в алгоритмику работы более одного диапазона ранжирования резко расширяется. В этом новом состоянии система может переключиться в новый адаптационный балансовый режим (диапазон d4, точки от В до С).
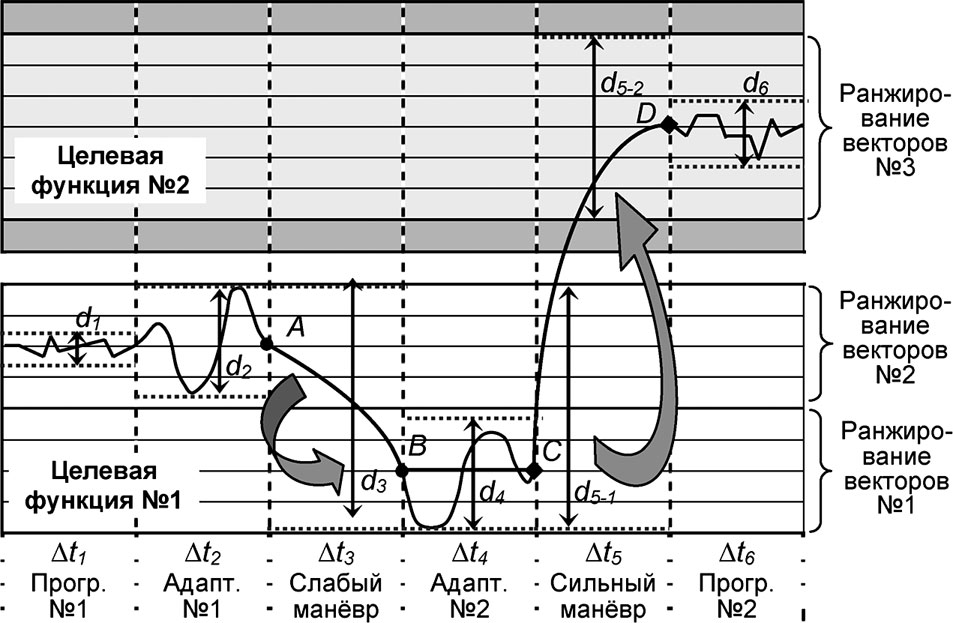
Рис. 6.7. Связь векторов управления с траекториями процесса управления
Переход системы в режим сильного манёвра (d5–1 и d5–2, точки С и D) означает ещё большее расширение диапазона работы и изменение целевой функции управления («Целевая функция № 1» заменяется областью «Целевая функция № 2»), после которого можно «уже в новой системе координат» перейти в другие режимы работы, например, в режим слабого манёвра, в адаптивный и затем в программный (∆t6), тем самым сузив и оптимизировав диапазон отработки внешних воздействий (d6).
Таким образом, во-первых, целевая функция или концепция управления – это алгоритмика обнуления элементов векторов ошибки управления и, во-вторых, ранжирование векторов управления по универсумному принципу позволяет определить ответ на вопрос, можно ли считать процесс управления успешным, если часть параметров, заложенных в векторы, ухудшилась, а часть улучшилась.
Ответ прост: качество управления улучшилось, если улучшились параметры более приоритетных (информационных) элементов векторов и качество управления ухудшилось, если значения этих параметров ухудшилось. Ещё раз отметим: улучшение/ухудшение параметров векторов, имеющих более высокий приоритет рано или поздно, но неизбежно приводит к соответствующему изменению значений в менее приоритетных элементах векторов.
Следует подчеркнуть, что в соответствии с U-законом неразрывности переход системы с одного в другой режим может осуществляться только последовательно, страта за стратой, поэтому при переводе системы из адаптационного режима в точке С в режим сильного манёвра по умолчанию подразумевается вначале перевод системы в режим слабого манёвра, и только затем в область сильного манёвра. Аналогично и в точке D после осуществления сильного манёвра система по умолчанию должна перейти в режим слабого маневра, затем в адаптационный режим, и лишь после этого она может работать в программном режиме.
Диапазон колебаний траектории программного режима работы определяется главным образом «материальными» ограничениями конструкции системы. Диапазон колебаний траектории адаптивного режима работы определяется главным образом «материальными» ограничениями настраиваемых элементов системы. Диапазон колебаний траектории «слабого манёвра» определяется глубиной и сложностью предикционного расчёта. Диапазон колебаний траектории «сильного манёвра» определяется интеллектуальным уровнем, определяющим возможности суперсистемы к прогностике.
Привязка режимов управления к типологизации систем управления показывает их однозначное соответствие (рис. 6.8). Программный и адаптивный тип СУ – это балансировочные режимы работы, прогностический (предикционный) и интеллектуальный – это манёвры супер/систем.

Рис. 6.8. Соответствие типа СУ режимам управления классов 4U и 2U
Конечно же, данная стратификация не является догмой: универсумный подход позволяет детализировать это описание, разбив его на пять, шесть, восемь, сто двадцать восемь и любое другое количество уровней в зависимости от требований к точности описания систем различной сложности. Универсумный подход позволяет более точно представить и однозначно связать между собой описание различных схем, режимов, систем, областей состояний и критериев качества процесса управления.
Назад: 6.1. Векторы управления
Дальше: 6.3. Гибкость и устойчивость и управления

