Эра роботизированных кошек
В конце июля 1994 г. ученые из Университета Карнеги — Меллона отправились на Аляску с дерзкой миссией — проникнуть в кратер действующего вулкана и собрать данные. Но исследователи, действовавшие по поручению NASA, не собирались спускаться в кратер сами; туда предполагалось отправить «Данте II» — восьминогого автономного робота, который собирал бы образцы токсичных газов и составлял топографическую карту внутренности кратера при помощи лазеров. Робот, соединенный с управляющей станцией на гребне кратера шлейфом, должен был несколько дней ползти вниз, до дна, и примерно столько же обратно.
Миссия эта в основном оказалась успешной. «Данте II» спустился на дно, собрал нужные данные и начал двигаться в обратном направлении. Однако за время операции изменилась погода, и твердый заснеженный грунт превратился в ненадежную и скользкую грязь. На обратном пути наверх «Данте II» поскользнулся на склоне 30°, опрокинулся и застрял. Потребовалось несколько дней, чтобы вытащить из кратера робота, весившего примерно тонну. Первая попытка поднять его из грязи вертолетом не удалась, и это заставило геологов самим принять участие в спасательной операции, что, вероятно, обесценило, по крайней мере символически, идею отправить в такое опасное место робота. Ученые прикрепили к нему трос, который позволил вытащить робота из вулканической горячей точки, чтобы он мог теперь спокойно отдыхать в музее в качестве экспоната — с семью сломанными ногами и разбитым лазерным сканером.
Нельзя сказать, что вариант, при котором робот споткнется, был совершенно неожиданным. Его заранее рассматривали и разбирали со всех возможных сторон — и очень этого боялись. Как сказал Джон Беарс — специалист по робототехнике из Университета Карнеги — Меллона: «В худших своих кошмарах мы видели, как одна из ног погружается в землю и просто не выходит обратно». «Данте II» был разработан с прицелом на статическую стабильность: имея восемь ног, он должен был в любой момент держать более чем две из них на грунте, даже при ходьбе. Благодаря своей конструкции робот был способен автономно передвигаться по пересеченной местности, но ничто в управляющей им программе не позволяло ему вносить поправки в случае неожиданных соскальзываний и падений.
Дело было не в ограничениях конструкции «Данте II», которая на тот момент являлась суперсовременной. Робототехника с давних времен страдала от неспособности машин адаптироваться к сложным условиям среды. Какой-нибудь робот, с легкостью преодолевающий обстановку смоделированного офиса, где мебель имитируется простыми геометрическими фигурами, полностью теряется, оказавшись в сложной обстановке реального офиса.
Но время шло, и появлялись новые стратегии. Когда «Данте II» упал, специалисты по робототехнике как раз пробовали новый подход к конструированию машин; вдохновение в этом новом подходе они черпали из природы, ориентируясь на биологические системы. Эволюция давно уже решила многие из задач, которыми занимаются сегодня создатели роботов, поэтому естественно было обратиться за готовыми решениями к продуктам эволюции. Насекомое, к примеру, может иметь почти такую же форму, что и «Данте II», но при этом оно способно преодолевать чрезвычайно сложный рельеф и даже адаптироваться к потере одной или нескольких конечностей. И любому роботу, предназначенному для функционирования в опасной среде, придется научиться имитировать такое умение. Возникшее при этом новое поле исследований на стыке биологии и робототехники получило название биоробототехника, и падающая кошка стала важным объектом исследований в этой новой области. Оказалось, кстати говоря, что рефлексивное переворачивание кошки роботам необычайно сложно имитировать.
Биоробототехнику можно условно разделить на две подобласти — два поля исследований. Первое — это робототехника, вдохновляемая биологическими идеями; в ней биологические системы изучаются с целью создания новых роботов. Вторая — биоробототехническое моделирование, при котором роботизированные модели животных конструируются для того, чтобы лучше разобраться в биологии животных.
Обе эти стратегии существовали задолго до того, как в оборот было пущено слово робот, даже раньше, чем человеку удалось обуздать электричество и создать первые электрические машины. Автор первых фотографий падающей кошки Этьен-Жюль Марей, к примеру, делал механические модели системы кровообращения, летающих насекомых и птиц. Он использовал эти схемы, как он их называл, для того чтобы понять, как животные живут и двигаются.
По иронии судьбы первую механическую модель падающей кошки — хотя и очень грубую — изготовил в 1894 г. Марсель Депре, который поначалу яростнее всех возражал против кошачьих фотографий Марея. Согласившись в конечном итоге с точкой зрения Марея, Депре опубликовал статью, в которой описал свое устройство.
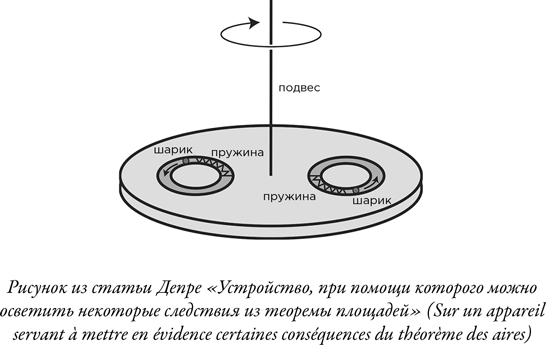
Плоский диск свободно подвешен на веревке и висит горизонтально. В поверхности диска вырезаны две кольцевые выемки, в каждой из которых находятся пружинка и металлический шарик, который она может толкнуть. Обе пружинки сжаты и сдерживаются нитями. Когда нити пережигают и тем самым освобождают пружинки, оба шарика запускаются по выемкам, проходят полный круг и оказываются в итоге в том же месте, откуда стартовали. Шарики движутся в одном направлении, и по закону сохранения момента импульса весь диск должен повернуться на какой-то угол в противоположном направлении. Однако поворота диска на полные 360º не произойдет, потому что он намного тяжелее шариков. В результате система окажется в том же внутреннем состоянии, с какого начинала, — мы пренебрежем небольшим изменением, связанным со сжатием пружин, — но повернутой на некоторый конечный угол. В эксперименте Депре устройство повернулось на 40º. Эта система, утверждал он, аналогична кошке, поскольку кошка тоже использует внутреннее движение, чтобы в конечном итоге развернуться в противоположную сторону, несмотря на то что в конце ее тело имеет ту же форму, что и в начале.
Кошачья модель Депре — хороший прибор бионического моделирования; исследователь использовал механическую модель, чтобы объяснить свое решение задачи о падающей кошке. Примером другого типа биоробототехники, черпающей вдохновение из природы, можно назвать «парового человека» Джорджа Мура, изобретенного примерно в это же время.
Человечество давно мечтало о создании автоматов — машин, способных двигаться и вести себя подобно живым существам. Эти автоматы можно рассматривать как предтечи современных роботов. «Паровой человек» Мура, описанный в журнале Scientific American в 1893 г., представлял собой мощный и потенциально взрывоопасный автомат в форме человека, способный шагать со скоростью 6–8 км/ч.
«Паровой человек», сделанный внешне похожим на марширующего рыцаря, двигался за счет размещенного в его груди парового котла; отработанный пар выходил у него через нос. Пар двигал передаточный механизм, который заставлял рыцаря шагать. Приведенные в журнале рисунки, однако, обманчивы, поскольку на них не показан горизонтальный стержень, на котором был установлен «паровой человек»; этот стержень был закреплен на вращающейся платформе. «Паровой человек» ходил кругами, и стержень не давал ему упасть.

