Командование роем: стигмергия
Следующим вопросом будет управление и командование роем роботов. Как осуществлять эффективный контроль над роем? Какие команды могут отдаваться рою? Как можно сбалансировать конкурирующие цели, такие как оптимальность, предсказуемость, скорость и устойчивость к разрушению?
Возможные роевые модели командования и контроля (рис. 6), основанные на подходе от более централизованного к более децентрализованному управлению, включают в себя:
– Централизованное управление, где элементы роя передают информацию центральному планировщику, который ставит задачи каждому элементу в отдельности;
– Иерархическое управление, где отдельные элементы роя контролируются агентами на уровне «подразделения», которые, в свою очередь, управляются контроллерами более высокого уровня, и так далее;
– Координацию на основе консенсуса, где элементы роя общаются друг с другом и принимают решение путем голосования или методом аукциона;
– Эмерджентную координацию, которая возникает естественным путем между отдельными элементами роя, реагирующими на других, как делают стаи животных.
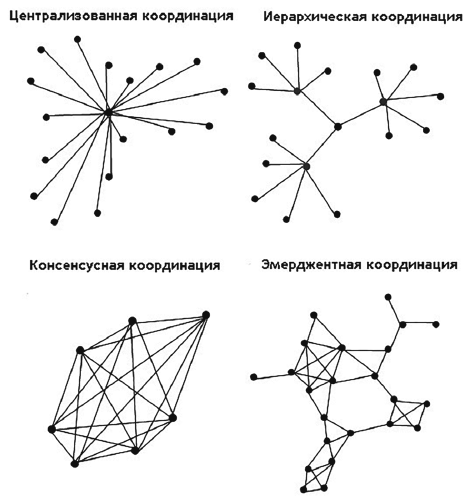
Рис 6. Роевые модели командования и контроля.
Каждая из этих моделей имеет свои преимущества и может быть предпочтительной в зависимости от ситуации. В то время как полностью децентрализованные рои могут найти оптимальные решения сложных проблем, например, так же, как колонии муравьев сходятся вместе на кратчайшем пути, чтобы нести пищу обратно на базу, выбирая оптимальное решение, которое может требовать несколько взаимодействий и, следовательно, займет определенное время. Централизованное или иерархическое планирование может позволить рою принимать оптимальное или, по крайней мере, «достаточно хорошее» решение быстрее, но требует более высокой пропускной способности для передачи данных центральному источнику, который затем высылает инструкции назад в рой. Действие на основе консенсуса путем механизмов голосования или аукциона может быть использовано при наличии низкой пропускной способности связи между элементами роя. Когда прямая коммуникация невозможна, элементы роя могут по-прежнему полагаться на косвенные связи, чтобы достичь эмерджентной координации. Это может произойти путем совместного наблюдения, например, как делают стада животных или табуны, или стигмергические связи, изменяя внешнюю среду, подобно тому, как термиты строят сложные структуры.
Термин «стигмергия» был придуман в 1950-х годах французским зоологом Пьером-Полем Грассе, который исследовал термитов. Он образован из двух греческих слов: стигма – «знак, метка», и эргон – «действие, работа», что обозначает метки индивидов, которые они оставляют в окружающей среде, стимулирующих дальнейшую активность других индивидов.
Централизованное управление не всегда является оптимальным, даже если существуют возможности для высокой пропускной связи, так как подробные планы и чрезмерно специфическое управление могут оказаться хрупкими в быстро меняющейся среде поля боя. Децентрализованное управление через локализованных «командиров отделений», механизмы голосования на основе консенсуса или эмерджентную координацию имеет преимущество проталкивать принятие решений непосредственно на поле боя. Это может как ускорить скорость немедленной реакции, так и сделать рой более устойчивым к сбоям в связи. Полчища отдельных элементов, реагирующих на своем месте в соответствии с целью командира более высокого уровня, представляют конечную цель децентрализованного исполнения. При отсутствии центрального контроллера, на которого можно положиться, рой не может быть исключен в целом, хотя отдельные элементы могут быть изолированы. Что децентрализованный рой может пожертвовать в плане оптимальности, то можно будет искупить за счет более высокой скорости реакции. И рои, которые общаются опосредованно через стигмергию или совместное наблюдение, как стаи или стада, невосприимчивы к прямой помехе связи.
Пол Шарре считает, что «толпы» простых, автономных агентов, действуя сообща, в соответствии с централизованным намерением командира, но децентрализованным исполнением, будет чертовски трудно победить. Десант парашютистов, выброшенный в Нормандии во время вторжения союзников, разрушил подробные планы союзников, но создал непреднамеренный эффект, и немцы не смогли противостоять «небольшим группам парашютистов», рассеянных вокруг, в тылу и внутри их территориальных единиц. Простые указания, типа как «бегите на звуки выстрелов и стреляйте во всех, кто одет не так, как вы» могут быть эффективным методом передачи приказа командира, оставляя возможности для адаптивных решений, связанных с ситуациями на местах. Недостатком полностью децентрализованного роя является то, что его будет более трудно контролировать, так как конкретные действия не обязательно могут быть предсказуемы заранее.
Поэтому выбор моделей командования и контроля для роев может зависеть от баланса конкурирующих и желаемых атрибутов, таких как скорость реакции, оптимальность, предсказуемость, устойчивость к потрясениям и уязвимость коммуникаций. Оптимальная модель командования и контроля для любой конкретной ситуации будет зависеть от множества факторов, в том числе:
– Уровня разведки элементов роя относительно сложности выполняемых операций;
– Количества информации, известной в отношении задачи и внешней среды до начала миссии;
– Степени, в которой изменяется внешняя среда в ходе миссии, или изменяется сама миссия;
– Скорости реакции, необходимой для адаптации к меняющимся событиям или угрозам;
– Степени, в которой между элементами роя требуется сотрудничество для того, чтобы выполнить задачу;
– Связи, как среди элементов роя, так между роем и контролерами, с точки зрения пропускной способности, задержки и надежности;
– Риски, как с точки зрения вероятности и последствий, субоптимальных решений и прямого отказа.
Лучший рой сможет адаптировать свою парадигму командования и контроля к изменяющимся условиям, таким, как доступная пропускная способность каналов коммуникации, но с адаптацией ее к децентрализованному процессу принятия решений, когда этот канал не работает. Кроме того, модель командования и контроля может изменяться во время различных фаз операции, а для определенных типов решений могут быть использованы различные модели.

