Книга: Непридуманные космические истории
Назад: Как управлять марсоходом
Дальше: Найти равновесие на Марсе
Проблемы роверов
И Морукян, и Васавада говорили о своем огромном облегчении и удовлетворении от того, что у Curiosity в целом не было серьезных неполадок – по крайней мере до сих пор. Практически вся научная программа сейчас выполняется почти в полном объеме. Но сотрудники команды инженеров держат на контроле несколько проблем.
– Примерно в 400-й сол мы поняли, что колеса изнашиваются быстрее, чем мы ожидали, – рассказывал Васавада.
И этот износ представлял собой не просто маленькие дырочки. Команда начала замечать проколы и выглядевшие угрожающе дыры. Инженеры поняли, что они возникают из-за езды по твердым, зазубренным камням, целое поле которых ровер преодолевал в тот момент.
– Мы не могли однозначно предсказать, какие именно острые камни могут нанести роверу ущерб, – говорит Васавада. – Мы провели испытания и увидели, что одно колесо может толкать другое на камень, делая повреждения еще более значительными. Теперь мы управляем марсоходом куда более осторожно, не так, как раньше. Мы вполне способны свести вред к куда более приемлемому уровню.
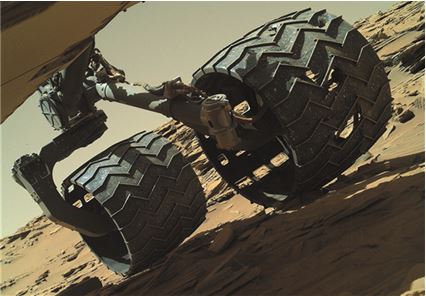
Чтобы проверять состояние колес, через определенные промежутки времени команда, управляющая марсоходом Curiosity, использует камеру для микрофотосъемки (MAHLI), находящуюся на роботизированной «руке». Эта фотография левого среднего и левого заднего колес ровера была сделана в ходе проверки, проходившей 18 апреля 2016 года во время 1315-го сола от начала работы Curiosity на Марсе. На снимке можно заметить отверстия в колесах. Источник: NASA / лаборатория реактивного движения Калифорнийского технологического института / Malin Space Science Systems
Ранее во время миссии компьютер Curiosity несколько раз уходил в безопасный режим, что означает: если программное обеспечение ровера обнаруживает проблему, его деятельность прекращается и следует «звонок домой».
Специальное программное обеспечение, защищающее от сбоев, присутствует на всех модулях и инструментах, и, когда возникает проблема, ровер останавливается и посылает на Землю информацию о событии. Эта информация может иметь различные категории срочности. В начале 2015 года ровер прислал сообщение, в сущности, говорившее о том, что «все очень и очень плохо». В буре на роботизированной «руке» произошло нечто вроде короткого замыкания.
– Программное обеспечение Curiosity может обнаруживать короткие замыкания примерно как обычный земной прерыватель короткого замыкания, стоящий у вас в ванной комнате, – объяснил Морукян. – Только вместо того, чтобы зажечь желтую лампочку, оно сообщает вам: «Все очень и очень плохо».
Поскольку инженеры не могут отправиться на Марс и все починить, ремонт приходится производить, либо посылая на ровер обновления программного обеспечения, либо изменяя порядок выполнения процедур.
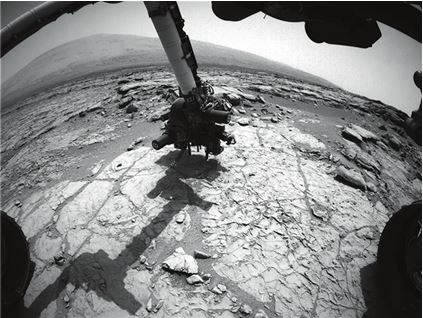
Бур Curiosity, расположенный на турели в конце роботизированной «руки» вместе с другими инструментами, пришел в соприкосновение с каменистой поверхностью. Это первое бурение в экспедиции состоялось на 170-й сол от начала работы Curiosity на Марсе (27 января 2013 года) в Йеллоунайф-бей. Фотография была сделана камерой предотвращения столкновений с препятствиями (Hazcam). Источник: NASA / лаборатория реактивного движения Калифорнийского технологического института
– Теперь мы просто используем бур более осторожно, – говорит Васавада, – и не сверлим сразу со всей мощностью, а наращиваем ее постепенно. Произошло примерно то же самое, что и с управлением марсоходом: мы делаем все деликатнее, но тем не менее добиваемся поставленной цели. Невосполнимого вреда пока что не было.
Более осторожное обращение с буром также необходимо, когда ровер наталкивается на более мягкие сланцы или песчаники. Морукян рассказал, что инженеры беспокоились, годится ли стандартный протокол бурения для слоистых пород. Поэтому они изменили методику так, чтобы использовать самые низкие параметры, которые только позволяют буру проходить сквозь камень.
Но, когда Curiosity начал свое путешествие в гору, появилось больше возможностей воспользоваться буром. Ровер сейчас двигается по местности, которую Васавада называет «богатой целями и очень интересной территорией», а команда ученых работает, чтобы связать общим геологическим контекстом все, что они видят на фотографиях.
Назад: Как управлять марсоходом
Дальше: Найти равновесие на Марсе

