Как управлять марсоходом
Откуда Curiosity знает, куда и как ехать по рельефу Марса? Возможно, вы рисуете в своем воображении инженеров лаборатории реактивного движения, сидящих с джойстиками наподобие тех, с помощью которых контролируют движения моделей на радиоуправлении или персонажей в видеоиграх. Но в отличие от тех, кто пилотирует радиоуправляемую модель или играет в компьютерную игру, водители марсианского планетохода не могут напрямую и сразу же наблюдать на видеоэкране, куда он едет. И точно так же, как во время посадки, всегда есть та или иная задержка по времени между посылом роверу команды и приемом ее на борту.
– Это не похоже на управление в реальном времени, потому что имеется задержка прохождения сигнала, – объясняет Джон Майкл Морукян, возглавляющий команду специалистов – «водителей» ровера.
По-настоящему должность Морукяна и членов его группы называется планировщик движения, что и является описанием сути того, что они делают. Вместо того чтобы заниматься вождением ровера как таковым, они заранее планируют его маршрут, потом вносят план в специальную программу, которая затем отправляет сформированный набор инструкций Curiosuty.
– Мы используем фотоснимки окружающей обстановки, которые присылает нам марсоход, – говорит Морукян. – У нас имеется набор стереоснимков с четырех черно-белых навигационных камер, фотографии с камер предотвращения столкновений с препятствиями (Hazcam), и все это дополняется цветными снимками высокого разрешения с камеры Mastcam, которые раскрывают для нас подробности строения грунта впереди по курсу и дают основания предполагать, камни и минеральные отложения какого типа мы можем найти в той или иной точке. Это помогает нам отыскивать структуры, которые выглядят интересно для ученых.
Используя все доступные данные, планировщики движения создают трехмерную визуализацию рельефа местности при помощи специальной компьютерной программы под названием «Программа создания последовательностей и визуализации маршрута ровера».
– По сути, это симулятор Марса, в котором мы помещаем виртуальную модель Curiosity в панорамную сцену, чтобы наглядно увидеть, как ровер может преодолеть свой маршрут, – разъясняет Морукян. – Еще мы можем надеть стереоочки, которые позволяют нашему зрению воспринимать сцену в трех измерениях, как если бы мы находились там, рядом с нашим марсоходом.
В виртуальной реальности «водители» марсохода могут манипулировать сценой и ровером, чтобы проверить все возможные варианты путей, выбирая лучшие и отсекая те, которых следует избегать. Здесь они имеют право совершать любые ошибки (увязнуть в дюнных песках, опрокинуть ровер, врезаться в большой камень, свалиться с обрыва) и таким образом выработать идеальную последовательность точек маршрута, а настоящий ровер при этом остается на Марсе в безопасности.
– Ученые тоже просматривают фотоснимки в поисках интересных для исследования особенностей и консультируются с планировщиками движения ровера, чтобы совместно проложить наилучший путь. Потом мы составляем подробные команды, которые необходимы, чтобы Curiosity проследовал из пункта А в пункт Б по заданному пути, – объясняет Морукян. – Мы можем добавить инструкции, необходимые роверу, чтобы воспользоваться рукой-манипулятором и выполнить определенные действия на нужных участках.
А каждую ночь марсоходу отдается команда отключиться на восемь часов, чтобы подзарядить свои электрические аккумуляторы от ядерного источника энергии. Но сперва Curiosity отправляет на Землю собранные данные, в том числе – снимки местности и накопленные научные сведения. На Земле планировщики движения принимают эти данные, учитывают их при обновлении программы создания последовательностей и пересылают сформированные инструкции обратно на Марс. Потом Curiosity «просыпается», загружает новые инструкции и приступает к работе. И далее весь цикл повторяется.
Кроме того, Curiosity оснащен системой автоматической навигации, которая позволяет марсоходу пересекать области, еще не зафиксированные на снимках. Поэтому он может перевалить через вершину холма и спуститься по другой стороне, следуя по не нанесенной на карту территории самостоятельно, а система автоматической навигации будет помогать ему избегать потенциальных опасностей.
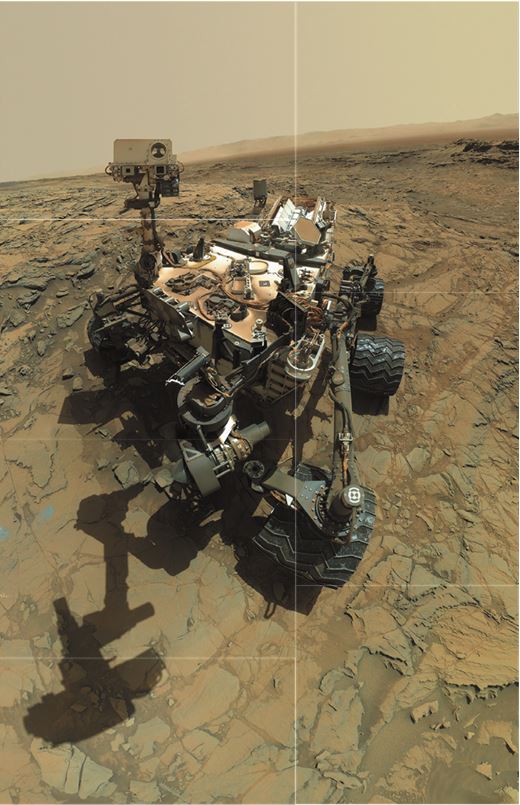
На этом селфи марсоход Curiosity показан на участке под названием «Большое небо», где он пробурил глыбу песчаника (виднеется в левом нижнем углу). Фотография является комбинацией снимков микрокамеры на манипуляторе (MAHLI), сделанных на 1126-м соле (6 октября 2015 года). Источник: NASA / лаборатория реактивного движения Калифорнийского технологического института / Malin Space Science Systems
– Мы не слишком часто пользуемся автоматической системой, потому что она требует большого количества вычислений, а это отнимает много времени, – рассказывает Морукян. – Часто оказывается гораздо выгоднее просто подождать до завтра, посмотреть полученные изображения и ехать до того места, которое мы можем видеть.
Показывая мне различные помещения, которые использовали группы планировщиков движения в лаборатории реактивного движения, Морукян объяснил, как им приходится действовать, имея дело с различными сроками.
– Мы должны распланировать не только маршрут движения на каждый день, – говорит он, – но также провести долгосрочное стратегическое планирование, используя орбитальные фотографии, сделанные камерой высокого разрешения HiRISE на Mars Reconnaissance Orbiter, и выбирать маршруты, основанные на характерных особенностях местности, заметных с орбиты. Наши команды вырабатывали стратегию, определяя наилучшие пути движения аппарата на много месяцев вперед.
Еще один процесс назвали «сверхтактическим» прогнозом на несколько следующих недель. Он включает согласование научных планов и уточнение видов деятельности, которой роверу предстоит заниматься в ближайшее время. И поскольку никто из команды больше не живет по марсианским часам, по пятницам планировщики разрабатывают задания на несколько дней.
– Поскольку по выходным мы не работаем, в пятницу приходится планировать деятельность на несколько солов вперед, – рассказывает Морукян. – Две работающие параллельно команды решают, в какие дни ровер будет двигаться, а в какие – заниматься другой деятельностью, например работать с роботизированным манипулятором или другими инструментами.
Тем не менее данные, которые поступают с марсохода в выходные, отслеживаются. Если возникает проблема, то вызывают членов команды, чтобы они рассмотрели ситуацию более детально. Морукян отметил, что несколько раз им приходилось по выходным собирать группу для экстренной работы, но пока что серьезных проблем не было. «Хотя ровер и держит нас в постоянном напряжении», – признал Джон.
Среди характерных особенностей марсохода – способность проводить определенные проверки на безопасность, такие как отслеживание общего наклона платформы аппарата и соединения системы подвеса колес. Благодаря этому, если ровер наедет на слишком большой предмет, он тут же останавливается.
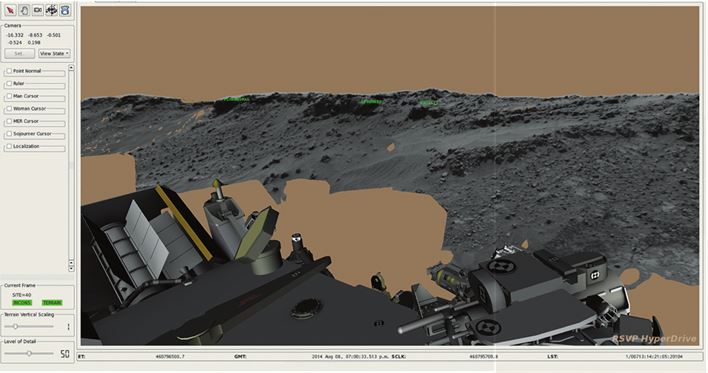
Навигационные камеры Curiosity каждый день делают черно-белые фотографии и отсылают их на Землю, а группы планировщиков совмещают их с другой информацией с марсохода, чтобы создать объемные модели территории. Добавив в них трехмерную модель аппарата, они могут лучше понять его положение, а также масштаб характерных особенностей ландшафта и расстояние до них. Источник: NASA / лаборатория реактивного движения Калифорнийского технологического института
Curiosity построили не ради достижения большой скорости. Аппарат был спроектирован для того, чтобы проезжать до 200 м в день, но ему редко удается одолеть такое расстояние за один сол. К середине 2016 года ровер прошел по поверхности Марса всего лишь около 13,2 км.
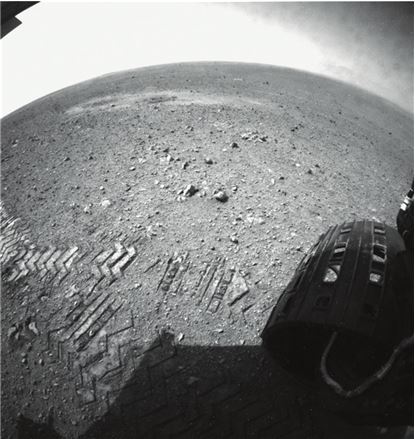
На этой фотографии мы видим изображение крупным планом следов, оставленных марсоходом Curiosity. Заметные на этом снимке отверстия в колесах ровера оставляют отпечатки, которые можно использовать для более точного управления аппаратом. Эти отпечатки являются написанными азбукой Морзе буквами сокращения JPL – «лаборатория реактивного движения» и помогают отслеживать, как далеко проехал марсоход. Источник: NASA / лаборатория реактивного движения Калифорнийского технологического института
Есть несколько способов определить, насколько далеко проехал Curiosity, но самые точные измерения позволяет провести метод, который называется визуальной одометрией. В колесах ровера есть специальные отверстия в форме символов азбуки Морзе, которые выводят на марсианской почве первые буквы слов «лаборатория реактивного движения» – дань уважения месту, ставшему домом для марсоходов и всех инженерных коллективов, работающих с ними.
– Для проведения визуальной одометрии сравнивают два самых последних стереоизображения из тех, которые получают примерно через каждые несколько метров продвижения, – рассказывает Морукян. – Отдельные характерные черты пейзажа сравниваются и отслеживаются, чтобы измерить, как камера (а вместе с ней и ровер) передвигается и поворачивается в трехмерном пространстве за время между двумя фотографиями. Это дает нам очень реалистичное ощущение того, как далеко прошел Curiosity.
С помощью тщательного изучения следов ровера можно определить тип сцепления колес с поверхностью, и, если они, например, скользят, это говорит о большом наклоне или песчаной почве.
К сожалению, теперь в колесах Curiosity появились новые отверстия, которых там вовсе не должно быть.
Назад: Другие открытия
Дальше: Проблемы роверов

