Книга: Микромеханические системы и элементы
Назад: 1.1. Описание и принцип действия гироскопа
Дальше: 1.3. Технологии 3D-МЭМС
1.2. МЭМС-гироскопы
В этом разделе рассмотрены МЭМС-датчики для измерения ускорения (акселерометры) и угловой скорости (гироскопы). Данные устройства активно используются в системах управления летательными аппаратами, для обеспечения безопасности движения автомобилей, в сельскохозяйственной технике, изделиях специального назначения и др. Существует много различных решений по исполнению МЭМС-устройств. В их числе – одноосевой МЭМС-гироскоп с вибрирующим кольцом и трехосевой емкостной МЭМС-акселерометр.
1.2.1. Одноосевой МЭМС-датчик угловой скорости (гироскоп) с вибрирующим кремниевым кольцом
Кремниевый цифровой гироскоп разработан с учетом требований к низкой стоимости изделия и экономичному энергопотреблению для систем навигации и наведения нового поколения. Он имеет два режима вывода: аналоговый сигнал напряжения, линейно-пропорциональный угловой скорости, и цифровой по протоколу SPI. Режимы вывода – аналоговый или цифровой – выбираются пользователем при подключении датчика к системной плате. Отличительной особенностью гироскопа является применение технологии сбалансированного вибрирующего кольца в качестве датчика угловой скорости. Именно она обеспечивает надежную работу и точное измерение скорости вращения даже в условиях сильной вибрации. Возможны две основные конфигурации гироскопа, одна из них позволяет датчику измерять угловую скорость по оси, перпендикулярной к плоскости системной платы, другая дает возможность определять угловую скорость по оси, параллельной плоскости материнской платы. Сочетание в одном устройстве гироскопов обеих конфигураций дает возможность получить инерциальную систему, измеряющую угловую скорость по нескольким осям (любые сочетания тангажа, крена и рысканья летательного аппарата). Такие гироскопы выпускаются в герметичных керамических LCC-корпусах, которые можно устанавливать на системные платы.
Датчик состоит из пяти основных компонентов: кремниевый кольцевой МЭМС-сенсор (MEMS-ring), основание из кремния (Pedestal), интегральная микросхема гироскопа (ASIC), корпус (PackageBase), крышка (Lid). На рис. 1.1 представлен вид основных детелей кремниевого МЭМС-сенсора.

Рис. 1.1. Кремниевый кольцевой МЭМС-сенсор. Основные детали
Кремниевый кольцевой МЭМС-сенсор, микросхема и кремниевое основание размещены в герметичной части корпуса с вакуумом, частично заполненным азотом. Это дает серьезные преимущества перед сенсорами, которые поставляются в пластиковых корпусах, имеющих определенные ограничения чувствительности в зависимости от уровня влажности. Диаметр кремниевого МЭМС-кольца равен 3 мм, толщина – 65 мкм. Его изготавливают методом глубокого реактивного ионного травления объемных кремниевых структур на пластинах. Кольцо поддерживается в свободном пространстве восемью парами симметричных спиц, которые исходят из твердого концентратора диаметром 1 мм в центре кольца. Процесс объемного травления кремния и уникальная технология изготовления кольца позволяют получить хорошие геометрические свойства, необходимые для точного баланса и термической стабильности сенсорного кольца.
В отличие от других гироскопов, в этом нет расхождений, создающих проблемы с интерференцией и трением. Указанные особенности существенно определяют стабильность датчика при колебаниях температуры, вибрации или ударе. Еще одним преимуществом подобной конструкции является ее «врожденный» иммунитет к ошибкам, которые датчики могут выдавать под влиянием ускорения, или «g-чувствительности». Пленочные приводы и преобразователи прикреплены к верхней поверхности кремниевого кольца по периметру и для получения электроэнергии подключены к связующим контактам в центре концентратора через треки на спицах. Это активирует, или «заводит», периметр кольца в рабочий режим вибрации на уровне Cos2 и с частотой 22 кГц, определяя радиальное перемещение, которое может осуществляться по причине первичного движения привода либо за счет действия кориолисовой силы, когда гироскоп вращается относительно его оси чувствительности, – см. рис. 1.2.

Рис. 1.2. Иллюстрация функционала гироскопа
Существуют одна пара приводов первичного движения, одна пара первичных снимающих преобразователей и две пары вторичных снимающих преобразователей. Комбинация сенсорной технологии и восьми вторичных снимающих преобразователей улучшает в датчике соотношение «сигнал/шум», что позволяет получать малошумящие устройства с отличными свойствами по угловому случайному дрейфу гироскопа, которые являются ключевыми для применения в сферах инерциальной навигации (например, стабильность наведения камеры или антенны).
Описанную схему можно сравнить с камертонной структурой, содержащей бесконечное количество камертонов, интегрированных в единую балансирующую вибрирующую кольцевую конструкцию. Это обеспечивает наиболее высокую стабильность измерения угловой скорости по времени, температуре, вибрациям и ударам для МЭМС-гироскопов этого класса. Концентратор в центре кольца сенсора установлен на цилиндрическом кремниевом основании диаметром 1 мм, которое связано с кольцом и ASIC с помощью эпоксидной смолы. Микросхема гироскопа имеет габариты 3×3 мм и изготовлена по технологии 0,35 мкм КМОП. ASIC и МЭМС-сенсор (кольцо) разделены физически, но соединены электрической цепью через золотые проводки. В связи с этим в подобной схеме отсутствуют внутренние каналы, что позволяет уменьшить шумовую нагрузку и получить отличные электромагнитные свойства. Керамический корпус датчика изготовлен по технологии LCC и представляет из себя многослойную оксидно-алюминиевую конструкцию с внутренними контактными площадками для «разварки», соединенными через корпус с наружными контактными площадками посредством многослойных вольфрамовых соединений.
Аналогичные интегральные соединения есть в крышке гироскопа, что обеспечивает размещение чувствительного элемента датчика внутри щита Фарадея и хорошие электромагнитные показатели гироскопа. При этом внутренние и наружные контактные площадки покрыты гальваническим путем – наложением слоем никеля и золота. Корпус включает в себя уплотнительное кольцо, на верхней части которого шовной сваркой приварена металлическая крышка. Сварка произведена электродом сопротивления, что создает полную герметичность конструкции.
В отличие от большинства МЭМС-корпусов, доступных сегодня на рынке, при изготовлении корпуса данного устройства используется специально разработанная шовная сварка, при которой исключена возможность образования комочков (брызг) сварки внутри гироскопа. При использовании других технологий сварки сварочные брызги могут попадать на нижние конструкции и негативно влиять на надежность гироскопа за счет воздействия на вибрирующий МЭМС-элемент, особенно в тех местах, где конструкции имеют небольшие зазоры. В корпусе также есть встроенный датчик температуры для обеспечения внешней термокомпенсации.
Принцип действия системы гироскопа
Описываемые гироскопы обычно являются твердотельными устройствами и не имеют движущихся частей, за исключением сенсорного кольца, которое имеет возможность отклоняться. Оно показывает величину и направление угловой скорости за счет использования эффекта «силы Кориолиса».
Во время вращения гироскопа силы Кориолиса действуют на кремниевое кольцо, являясь причиной радиального движения по периметру кольца. По периметру кольца равномерно расположены восемь приводов/преобразователей. При этом есть одна пара приводов «первичного движения» и одна пара первичных снимающих преобразователей, расположенных относительно их главных осей (0° и 90°). Две пары вторичных переключающих преобразователей расположены относительно их вторичных осей (45° и 135°). Приводы первичного движения и первичные переключающие преобразователи действуют вместе в замкнутой системе, чтобы возбуждать и контролировать первичную рабочую амплитуду вибрации и частоты (22 кГц). Вторичные снимающие преобразователи распознают радиальное движение на вторичных осях, величина которого пропорциональна угловой скорости вращения, благодаря которой гироскоп обретает угловую скорость.
Преобразователи производят двухполосный сжатый передающий сигнал, демодулирующийся обратно в полосы, ширина которых контролируется пользователем одним простым внешним конденсатором. Это дает пользователю возможность полностью контролировать производительность системы и делает преобразование абсолютно независимым от постоянного напряжения или низкочастотных параметрических условий электроники. На рис. 1.3 продемонстрирована структура кремниевого кольца сенсора, показывающая приводы первичного движения «PD» (одна пара), первичные снимающие преобразователи «PPO» (одна пара – слева) и вторичные снимающие преобразователи «SPO» (две пары – справа).

Рис. 1.3. Иллюстрация структуры кремниевого кольца сенсора с приводами
На рис. 1.4 схематично показано кольцо, при этом спицы, приводы и преобразователи удалены для ясности. В данном случае гироскоп выключен, кольцо круглое.

Рис. 1.4. Иллюстрация кольца в положении покоя
В момент, когда датчик находится в выключенном состоянии, в кольце возбуждается движение вдоль его основных осей за счет приводов первичного движения и первичных снимающих преобразователей, воздействуя в замкнутом контуре на систему контроля ASIC. Круглое кольцо принимает в режиме cos2 эллиптическую форму и вибрирует с частотой 22 кГц. Это показано на рис. 1.5, на котором гироскоп уже включен, но еще не вращается. Так, на четырех вторичных снимающих узлах, расположенных на периметре кольца под углом 45° по отношению к основным осям, нет радиального движения.

Рис. 1.5. Иллюстрация состояния включенного гироскопа в отсутствие движения
Если гироскоп подвергается воздействию угловой скорости, то на кольцо действуют силы Кориолиса: по касательной к периметру кольца относительно главных осей. Эти силы деформируют кольцо, что вызывает радиальное движение вторичных снимающих преобразователей. Данное движение, определяемое на вторичных снимающих преобразователях, пропорционально прилагаемой угловой скорости. При этом двухполосный сжатый передающий сигнал демодулируется с учетом основного движения. В итоге получается низкочастотный компонент, который пропорционален угловой скорости.
На рис. 1.6 представлен внешний вид монтажной платы ASIC-гироскопа.
В таком виде устройство можно встретить в современных блоках и конструкциях.

Рис. 1.6. Внешний вид ASIC-гироскопа
Подобные датчики обладают миниатюрными габаритами (6,5×1,2 мм) при сверхнизком потреблении энергии (12 мВт). Для них характерны широкий диапазон измерения, сверхмалый вес 0,08 г и высокая стабильность работы. Гироскопы подобной конструкции можно с успехом применять для измерения скоростей вращения объекта по трем осям в транспортных и персональных навигаторах для определения и сохранения параметров движения и определения местоположения; в системах отслеживания по трассе на сельскохозяйственной технике для стабилизации антенн; в промышленной аппаратуре, робототехнике и других сферах. Использование датчиков угловой скорости на летательных аппаратах позволяет на порядок уменьшить габариты, вес, энергопотребление приборов и в результате значительно снизить цену навигационной системы в целом. Надежность и точность в управлении широкого спектра самолетов, вертолетов и других летательных аппаратов при этом увеличиваются. Таким образом, данный вид гироскопов оптимально подходит для использования в ситуации, когда есть ограничения по габаритам, весу и стоимости изделия.
В табл. 1.1 представлены некоторые технические характеристики гироскопов с датчиками МЭМС.
Таблица 1.1. Технические характеристики гироскопа

1.2.2. Емкостной трехосевой МЭМС-акселерометр с цифровым выходом
Высокопроизводительный трехосевой емкостной акселерометр изготовлен по специальной технологии 3D-МЭМС и представлен на рис. 1.7.
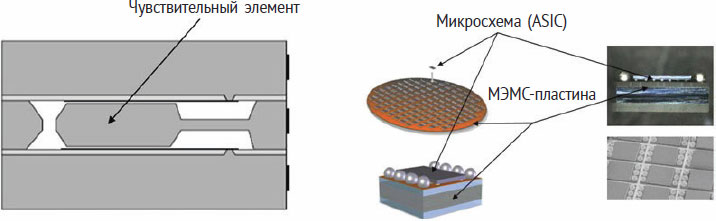
Рис. 1.7. Высокопроизводительный трехосевой емкостной акселерометр
В корпусе датчика находятся высокоточный чувствительный элемент для определения ускорений и сервисная электроника (ASIC) с гибким цифровым выходом SPI.
Схематичное расположение ASIC и блока сенсорного элемента в датчиках подобной конструкции показано на рис. 1.8.

Рис. 1.8. Схематичное расположение ASIC и блока сенсорного элемента
На рис. 1.9 представлен внешний вид высокопроизводительного 3-осевого емкостного акселерометра.

Рис. 1.9. Внешний вид платы высокопроизводительного 3-осевого емкостного акселерометра
Корпус акселерометра изготовлен из пластика, а крышка – из металла. В нижней части корпуса по обеим сторонам расположены плоские свинцовые выводы для поверхностного монтажа на печатную плату. На рис. 1.10 представлен внешний вид готового корпуса акселерометра.

Рис. 1.10. Конструкция корпуса акселерометра
Подобная конструкция корпуса гарантирует надежную работу сенсора на протяжении всего жизненного цикла. Для обеспечения стабильного выхода акселерометры подобного класса разрабатываются, производятся и тестируются в широком диапазоне температур, влажности и механического шума. У датчика есть возможность самодиагностики по нескольким сценариям. Он полностью совместим с одно– и двухосевыми акселерометрами данного типа, что дает возможность комбинировать датчики при построении различных сенсорных систем.

