В космосе
Рассматривая космос как среду с экстремальными условиями, мы видим, что он чрезвычайно враждебен по отношению к человеку — вакуум, радиация, холод и сами масштабы космического пространства превосходят границы известного нам из земного опыта. Вне космического корабля или скафандра человек просто-напросто замерзнет, сгорит или взорвется. Это мир гигантских расстояний и чудовищных условий, а кроме того, любая деятельность в нем связана с высокими политическими рисками. С тех пор как в XX веке началась эра полетов в космос, возник и вопрос о том, какой тип присутствия посредством каких машин мог бы обеспечить нам наиболее эффективное пребывание в его глубинах.
Почти 50 лет назад, когда Нейл Армстронг сажал свой лунный модуль, у него была и система автоматической посадки, и аналог индикатора на лобовом стекле. Это был индикатор пассивного типа, еще совсем простой конструкции: он представлял собой серию угловых отметок, нанесенных на стекло кабины Армстронга. Бортовой компьютер демонстрировал число на экране, наподобие ЖК-дисплея, и, если Армстронг правильно держал голову, он мог совместить соответствующую этому числу угловую отметку на иллюминаторе с той точкой лунной поверхности, в сторону которой компьютер вел их лунный модуль.
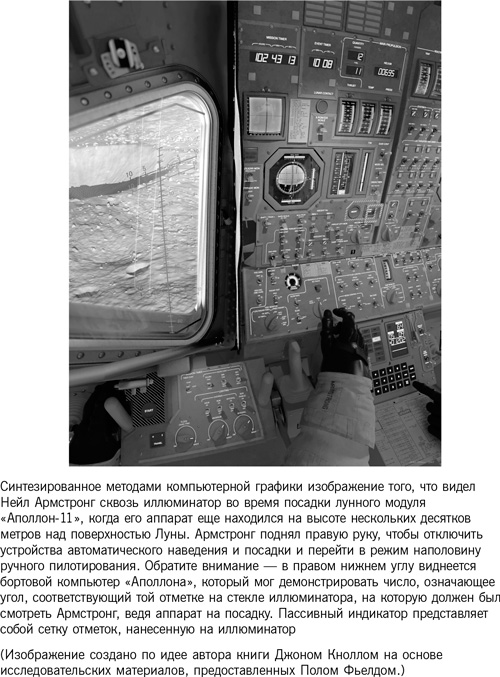
Если бы Армстронгу не понравился вид поверхности в этом месте из-за наличия там крупных камней или кратеров, он мог бы одним толчком джойстика в руке «переназначить» зону посадки, сместив точку дальше, ближе, правее или левее, почти так же, как управляют курсором на экране компьютера при помощи мыши. После этого компьютер перерассчитал бы необходимую траекторию и выдал бы пилоту новое число, показывающее, куда следует смотреть теперь. Армстронг имел возможность переназначать зону посадки сколько угодно раз, работая в человеко-машинном информационном цикле, позволявшем обоим его участникам прийти к согласию по поводу идеальной зоны, в которой автоматическая система выполнила бы безопасное прилунение.
Однако Армстронг так и не воспользовался автоматикой. В реальном полете «Аполлона-11» все произошло так: Нейлу не понравилась выбранная компьютером зона посадки, поскольку в ней были и кратер, и камни. Но вместо того, чтобы назначить новую зону, Армстронг отключил автоматическую систему и с высоты несколько десятков метров повел модуль на посадку в полуавтоматическом режиме (его действия послужили прообразом того, как поступил Люк Скайуокер в самом первом фильме «Звездные войны»: он тоже отключил компьютер и положился на свою мистическую Силу, чтобы взять верный прицел для уничтожения «Звезды смерти»).
В одной из своих ранее вышедших книг я писал как об этом, так и о том, что во всех пяти последовавших эпизодах прилунения «Аполлонов» буквально каждый командир лунного модуля отключал эту систему автоматической посадки примерно на одной и той же высоте. Большинство из них объясняли свои действия тем, что в изначально выбранной зоне имелись камни или кратеры, хотя компьютер без проблем мог бы посадить их в какой-либо другой зоне по их выбору.
У спейс-шаттла тоже была система автоматической посадки. После возвращения с орбиты раскаленный от торможения в плотных слоях атмосферы «челнок» имел возможность следовать за специальным микроволновым лучом, и компьютер довел бы его до посадки, а пилоты могли лишь следить за процессом и вообще не касаться рычагов управления (хотя им было необходимо вручную выпускать посадочные шасси и тормозной парашют). Спейс-шаттл выполнил 135 полетов, начиная с 1981 года и заканчивая его выводом из эксплуатации в 2011-м. И в каждом из полетов командиры шаттлов отключали автоматику перед посадкой и приземляли корабль вручную.
Пожалуй, ближе всего к выполнению посадки «на автомате» орбитальная ступень была лишь во время третьего полета — в тот раз в целях испытания системы астронавт Джек Лусма позволил автоматике довести орбитальную ступень до высоты около 37 м над поверхностью планеты. Приземление на полигоне «Уайт Сэндз» в штате Нью-Мексико происходило в условиях сильного порывистого ветра, и программное обеспечение не очень справлялось с выполнением захода на посадку. Из-за этого при переходе с автоматического на ручное управление аппарат подвергся незапланированной тряске и даже серьезно «закозлил» в момент касания полосы колесами шасси. И хотя программу с тех пор усовершенствовали, ей больше так и не доверили посадку до самого окончания череды полетов шаттла.
Легко приписать действия пилотов, отключавших автоматику для того, чтобы пилотировать вручную, их «профсоюзной солидарности» в форме протеста против технического нововведения. Конечно, профессиональная гордость играла свою роль, но было бы ошибкой фокусировать внимание только на одном этом факторе.
Я спрашивал бывших командиров шаттлов, почему они не пользовались автоматической посадкой, несмотря на то что были обучены этому режиму на тренажерах и при тренировках на самолете — имитаторе шаттла? Они отвечали, что в том случае, если бы что-нибудь пошло не так и им пришлось бы перехватывать управление, было бы слишком сложно и чревато аварией «вклиниваться в процесс» управления за короткий промежуток времени до касания (к тому же чувствительная наземная аппаратура, которая требовалась для наведения «челнока» на посадочную полосу, была не на всех запасных аэродромах, предназначенных для аварийного приземления аппарата). Учитывая, что у вас есть всего лишь одна попытка посадить шаттл, самое лучшее — вести его на посадку вручную с самого начала. Вспомните, как обескуражены были пилоты рейса 447 авиакомпании Air France, когда машина вдруг устранилась от управления самолетом.
Тем не менее, как и упомянутые ранее летчики компании EuroAir, пилоты шаттла вели орбитальную ступень, пользуясь точкой наведения и вектором направления полета. Собственно говоря, эти данные поступали от той самой системы автоматической посадки, которая вовсе не выключалась, а лишь была связана запретом на выдачу команд на органы управления космического корабля. Таким образом, через точку наведения алгоритм автоматической посадки, по сути, руководил действиями пилотов, направлявших полет шаттла.
Астронавты «Аполлонов» и командиры шаттлов, обремененные ответственностью за судьбу своей страны и вынужденные рисковать жизнью, делали по отношению к машине тот же самый выбор, что и пилоты EuroAir, — активно взаимодействовали с ней, визуально контролируя процесс, вместо того чтобы лишь «надзирать» за ее действиями.
Пренебрежение возможностями системы автоматического приземления шаттла — всего лишь одно из звеньев в сложной истории полетов человека в космос. В 2011 году, сорок лет спустя после начала космической эры, «челноки» отправились в отставку, и американцы оказались на распутье. И реальные, и виртуальные полеты в космос принесли свои невероятные плоды, хотя этот опыт и был омрачен неудачами.
Заглядывая в будущее, многие задавались вопросом: нужно ли человеку по-прежнему выходить в космос или все задачи уже можно решить, удаленно управляя приборами с Земли? Наряду с этим отмечу, что в наследии полетов спейс-шаттлов красной нитью проходят не только плодотворные научные достижения, но и действия людей. Такие примеры, как ремонт на орбите космического телескопа имени Хаббла и строительство Международной космической станции, казалось, укрепляли веру в важность присутствия человека в космосе с традиционными целями — чтобы строить и ремонтировать.
В то же самое время серия маленьких роботов-планетоходов, работавших на Марсе, подарила ощущение непосредственного присутствия на далекой планете как группам ученых, так и широкой публике, несмотря даже на то, что пропускная способность их канала была очень ограничена и передача сигнала страдала от задержек. Как же ученым удалось «почувствовать себя на месте действия» на таком огромном расстоянии? Как люди работают на Марсе?
Чтобы ответить на эти вопросы, давайте подробно разберем эти хорошо известные аспекты космической деятельности — пилотируемые полеты и работу автоматических аппаратов. И сервисно-ремонтные полеты к «Хабблу», и удаленная работа на Марсе посредством роботов в равной степени служат примерами присутствия человека в космосе, но в очень разных ролях: в одном случае человек выступает как ремонтник или строитель, который использует ловкость собственных рук, а в другом — он исследователь, принимающий решения на основе своих научных знаний.
В обоих случаях, по мере того как люди учатся работать за пределами привычной земной оболочки, их опыт и мастерство находят применение посредством обширных, межпланетных масштабов сетей различных средств. Развитие робототехники оказало глубокое влияние на возможность операций по ремонту космического телескопа «Хаббл», а следовательно, и на процесс строительства Международной космической станции. Удаленные планетоходы на Марсе позволили ученым и инженерам каждый день присутствовать на другой планете и вести там научную работу.
Космический телескоп «Хаббл», который обращается по своей орбите вокруг Земли уже больше двух десятков лет, ремонтировали и усовершенствовали люди, работавшие в просторном отсеке полезной нагрузки шаттла, пять раз за 16-летний период. На первый взгляд, эти операции кажутся примером непревзойденного мастерства и ловкости рук опытных специалистов, действовавших в космическом пространстве. Но все, что выполнялось во время них, было тесно связано с робототехникой. До того как мы перенесемся в настоящие космические дали, где человек присутствует удаленно, — на Марс и еще дальше, — стоит обратить внимание на то, в какой степени «пилотируемый космос» завязан на использование различных машин, а также на то, что опыт взаимодействия с роботами — важнейший навык современного астронавта.
Сама история космического телескопа есть история о том, как менялся опыт работы астрономов. По сути, астрономия — это изучение удаленных объектов, и астрономы никогда не соприкасаются с объектами, которые исследуют. И тем не менее у них существует традиция проводить целенаправленные наблюдения в затворничестве, скажем, на вершинах гор, далеко от мирской суеты (например, на гавайском вулкане Мауна-Кеа), или просто сидя ночью на крышах зданий по всему миру. В наши дни астрономы часто выполняют наблюдения удаленно, посылая из офиса запросы на использование какого-либо телескопа, а взамен получая через Интернет готовые снимки и данные. Размещенный в космосе телескоп — пожалуй, наиболее яркий пример работы астрономов с инструментом, расположенным в удаленной точке наблюдения.
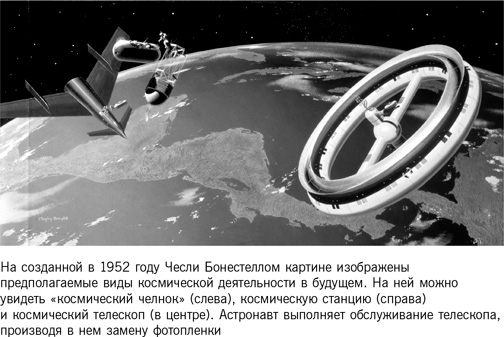
Идея космического телескопа имеет давнюю историю и восходит к немецкому пионеру ракетной техники Герману Оберту, который выдвинул свою идею в 1923 году. Позднее, в 1952 году, его ученик и последователь Вернер фон Браун, работая совместно с художником Чесли Бонестеллом, создал оказавшую на многих глубокое влияние серию иллюстрированных статей о перспективах пилотируемого освоения космоса. Статьи публиковались в журнале Collier's. В числе прочего фон Браун описывает орбитальный космический телескоп, который управляется автоматически, а астронавты лишь время от времени наносят ему визиты для замены фотопленки. Хотя фон Браун и не сумел предугадать будущих достижений в области получения цифровых изображений, сама идея о том, что люди могут удаленно обслуживать размещенные в космосе телескопы, реализовалась.
Однако ранняя концепция телескопа «Хаббл» предполагала, что его обслуживание в полете будет проводиться только при помощи роботов. Сценарий был такой: шаттл выполняет сближение с телескопом, его захват при помощи руки-манипулятора и установку на жесткое основание в своем отсеке полезной нагрузки (практически так это и происходило во время реальных полетов для обслуживания аппарата).
Но в сценарии не предусматривалось, что астронавтам потребуется надевать космические скафандры и напрямую манипулировать с аппаратурой телескопа. Идея заключалась в том, что рука-манипулятор будет заменять модули телескопа, вытаскивая из него части, подлежащие замене, помещая их в отсек полезной нагрузки и вставляя взамен новые. Все компоненты должны быть заранее известны и размещаться на жесткой монтировке, так что задача казалась посильной даже для робототехники 1970-х годов — по образцу автоматической сборки на конвейере.
Люди должны были управлять процессом, находясь внутри гермокабины «челнока», и лишь отдавать руке-манипулятору команды на выполнение заранее запрограммированных задач. «Все, что требовалось от астронавта, это сидеть в отсеке и жать на кнопки, — вспоминает Фрэнк Сеполлина, отец-основатель практики обслуживания спутников на орбите в NASA, — а манипулятор заменял бы модули-инструменты». Для отработки этих операций было построено большое сооружение-тренажер, где модули телескопа с датчиками и целевой аппаратурой можно было извлекать и заменять при помощи средств роботизации. Такое понимание задачи подстегнуло создание механической руки-манипулятора для шаттла, которая была сделана в Канаде и сравнительно поздно стала разрабатываться как часть системы спейс-шаттла.
Многое из этого исходного варианта и в самом деле вошло в реальные сценарии ремонтных работ на «Хаббле»: например, жесткое крепление телескопа и управление рукой-манипулятором изнутри кабины «челнока». Но решающую роль все же сыграли астронавты в скафандрах, работавшие в пределах отсека полезной нагрузки, зачастую — в закрепленном положении на конце манипулятора, а иной раз практически полностью забираясь внутрь ремонтируемого инструмента.
«Хаббл» стал первым спутником NASA, построенным с учетом возможности ручного ремонта. Он был выведен на орбиту в 1990 году, и вскоре представился случай такой ремонт выполнить. Из-за ряда ошибок в расчетах и промашек, допущенных конструкторами, оказалось, что некоторые небольшие отклонения от правильной формы были допущены одновременно и в главном зеркале телескопа, и в том оборудовании, при помощи которого проверялась правильность формы.
Когда оказалось, что качество получаемых с «Хаббла» изображений не соответствует ожиданиям, сложилось впечатление, что дорогущий телескоп на орбите, затраты времени и средств на который были больше обещанных, — сущий хлам. «Название "Хаббл" звучало для всех, как "Гинденбург", — вспоминал астронавт Джефф Хоффман. — Для NASA это была катастрофа».
На обложке выпуска от 9 июля 1990 года журнала Newsweek красовался заголовок: «Звезды нам не светят: NASA просчиталось на 1,5 млрд долларов». И это лишь один из примеров обрушившихся на управление злых шуток и обвинений.
Так, невероятная серия операций по ремонту «Хаббла» началась с необходимости заменить неисправную оптику телескопа. NASA сумело собрать команду ремонтников, которым предстояло выполнять свою работу в космосе. Ведущими специалистами были Джефф Хоффман и Стори Масгрейв. Хоффман, получивший в Гарварде ученую степень доктора в области астрофизики, до этого трижды летал в космос. Масгрейв имел подготовку и опыт в различных областях: он был авиамехаником и пилотом авиации корпуса Морской пехоты США, а также врачом. Его опыт в хирургии давал надежду на то, что он справится со сложными манипуляциями, необходимыми для решения задачи. Двоим астронавтам предстояло поступить с «Хабблом» как с живым пациентом: вскрыть его оболочку, заменить определенные части, устранить проблемы, провести необходимые усовершенствования, а затем подлатать и отпустить на все четыре стороны.
Перед стартом администратор NASA Дэниел Голдин вызвал команду корабля в свой офис и заявил им, что будущее агентства зависит от того, насколько хорошо они выполнят свою работу. Проект перспективной космической станции только обсуждался в конгрессе, и его судьба еще не решилась. NASA было необходимо доказать, что оно способно компенсировать допущенные при создании «Хаббла» ошибки, а его люди могут выполнять сложную, рискованную работу на орбите. Для сборки станции требовалось очень много ручного труда, но, если бы NASA не удалось восстановить свою репутацию с «Хабблом», конгресс не доверил бы управлению новый, гораздо более масштабный проект. Чисто техническая на первый взгляд задача починки инструмента, предназначенного для того, чтобы вглядываться в глубины космоса, имела далекоидущие политические последствия на Земле.
Для того чтобы привыкнуть работать в невесомости, команда долгими часами тренировалась в специальной гидролаборатории NASA. Отрабатываемые действия были столь сложны, что их список не помещался у Масгрейва и Хоффмана на справочных табличках, прикрепляемых к запястьям. Их коллегам, остающимся внутри «челнока», приходилось зачитывать им инструкции по радио. Хоффман и Масгрейв улучшили и заново написали сценарий ремонта, предоставленный производителем, попутно отрабатывая «хореографию» своих перемещений и действий в особых ситуациях, о возможности которых никто не сообщал им заблаговременно.
Пуск шаттла «Индевор» в декабре 1993 года положил начало одному из самых дерзких предприятий за все время действия программы «космического челнока». Планом полета было предусмотрено пять сеансов внекорабельной деятельности, и еще два могли быть выполнены в случае необходимости. Через сутки после запуска «Индевор» сблизился на орбите с «Хабблом». За это время команда успела проверить работу всего оборудования. Вскоре астронавты заметили несчастный телескоп, и тут же стало ясно, что у него есть еще одна проблема: действующие панели солнечных батарей оказались повреждены. На следующий день, чтобы подготовить аппарат к ремонту, из наземного центра управления в Мэриленде «Хабблу» были посланы команды перейти в защитный режим и сложить антенны.

Под контролем компьютера шаттл на двигателях малой тяги все ближе и ближе подбирался к телескопу. В конце концов командир Ричард Кови взял управление на себя и подвел корабль к «Хабблу», заставив его зависнуть на расстоянии около 10 м от телескопа, который казался совершенно неподвижным. Хоффман вспоминал: «Это была какая-то чертовщина... Представьте себе: вы видите, как этот огромный телескоп неподвижно парит над отсеком полезной нагрузки, и в то же время и вы, и он мчитесь со скоростью 29 000 км/час».
Швейцарский астронавт Клод Николлье при помощи руки-манипулятора корабля «Индевор» захватил телескоп и поместил его на безопасное причальное устройство в отсеке полезной нагрузки. «Мы обменялись рукопожатиями с телескопом мистера Хаббла», — прокомментировал Кови по радио. После этого пойманный телескоп был зафиксирован в отсеке замками. Команда стала изучать свое поле деятельности с помощью камеры, передававшей изображение с конца руки-манипулятора.
На третий день полета Масгрейв и Хоффман стали надевать скафандры для своего первого выхода в космос. Их инструменты свисали с контейнеров, закрепленных на груди, а также с длинного приспособления со множеством крючков, которое они называли «кукан».
Оказавшись в пустоте за бортом космического корабля, увешанные торчащими во все стороны инструментами и механическими конечностями, астронавты начали обустраивать свое рабочее место в грузовом отсеке шаттла. Они делали это по образцу того, как слесарь обустраивает верстак: рядом с местами, подлежавшими ремонту, помещали инструменты — какие-то из них были действительно необходимы, а другие имелись на всякий случай. «У нас были молотки, ножовки, монтировки, — вспоминает Масгрейв. — К счастью, ни один из этих грубых инструментов не потребовался, но мы были готовы применить и их».
Затем Хоффман укрепил ножной якорь на конце руки-манипулятора шаттла и пристегнул свои ноги к нему. Николлье, управляя манипулятором изнутри «челнока», отправил длинную механическую руку и своего коллегу Хоффмана вместе с ней в «путешествие» вокруг телескопа, чтобы получить возможность поближе рассмотреть его. Поначалу Хоффман отдавал Николлье команды, как именно его перемещать на манипуляторе, но по мере того, как набирался опыт, Николлье научился предвидеть действия Хоффмана и в нужный момент передвигал его, куда требовалось, — так между ними установилась бессловесная связь.
В какой-то момент случилось то, что потом назвали «великая охота на винтик»: небольшой винт выскользнул из сумки с инструментами и стал улетать прочь из отсека полезной нагрузки — а он мог представлять собой опасность и для «Хаббла», и для тонких механизмов самого шаттла. Николлье повез Хоффмана далеко за пределы отсека, чтобы тот мог поймать винт, но манипулятор двигался слишком медленно, и догнать винтик не получалось. Пилот корабля Кэн Бауэрсокс, который также был и дублером-оператором руки-манипулятора, воспользовался компьютером и изменил кое-какие параметры настройки. У него получилось ускорить перемещения руки, и так Хоффман поймал винтик.
Вскоре Масгрейв и Хоффман открыли большие створки в борту телескопа-спутника, и Хоффман забрался внутрь. Работая подобно механику, обслуживающему автомобиль, Хоффман демонтировал несколько модулей, в которых гироскопы вышли из строя, и заменил их новыми.
Под конец рабочего дня, когда Масгрейв уже занимался другой задачей, Хоффман попытался закрыть эти створки — это была операция, хорошо отработанная им в гидролаборатории. «И вот, я закрываю створку, поворачиваю защелку и перемещаюсь вверх, чтобы запереть задвижку...» Но створка не закрылась. Хоффман вызвал Масгрейва, который, появившись, обнаружил, что может придерживать верхнюю часть створки, но запереть задвижку не в состоянии. «Нам требовалось пять рук, — вспоминал раздосадованный Хоффман, — а у нас было лишь четыре на двоих».
Чтобы решить проблему, они задействовали всю свою широкую сеть помощников, описав проблему инженерам на Земле, рассказав и показав обстановку в переданных цифровых фотографиях. Распределенная команда выработала решение — использовать устройство для фиксации полезной нагрузки, своего рода грузовой строп, чтобы мало-помалу прижать створку. Наконец она закрылась. Астронавты провели вне корабля почти восемь часов — только один выход в открытый космос в истории NASA длился дольше. По словам Хоффмана, он за это время устал умственно, не физически.
На следующий день астронавты Томас Эйкерс и Кэти Торнтон заменили поврежденные солнечные батареи космического телескопа. Кроме того, они с большой осторожностью установили на место аппаратуру COSTAR — сборку корректирующей оптики, предназначенной для компенсации главного оптического дефекта «Хаббла».
На шестые сутки полета, работая в ночное время в свете прожектора, бьющего из грузового отсека шаттла, Хоффман и Масгрейв заменили широкоугольную планетарную камеру телескопа. Вновь совершив перемещение на конце руки-манипулятора, управляемой Николлье, и воспользовавшись помощью парящего рядом Масгрейва, Хоффман извлек инструмент размером с концертный рояль из корпуса телескопа. Он поместил его в специальный фиксатор в отсеке полезной нагрузки и повторил процесс в обратном порядке с новой камерой, остро ощущая, что если он тряхнет или испачкает ее, то испортит все будущие снимки «Хаббла».
Еще три дня подобной акробатики потребовалось, чтобы заменить электронику приводов солнечных батарей и другие части аппарата. После кое-каких проверок Николлье снова ухватил телескоп манипулятором и затем выпустил его в открытый космос.
Масгрейв, рассказывая об этой миссии, оперировал терминами «хореография» и «балет», чтобы описать весь неторопливый и грациозный процесс пространственно-временного перемещения элементов, в котором недопустимы были ошибки. Он говорил, что астронавты сыграли роль деликатных связок между большими частями целой системы, состоявшей из телеуправляемых робототехнических средств и людей: «Мы просто глаза и руки, и мы — рабочие органы ЦУПа». Пилот шаттла Кэн Бауэрсокс назвал этот полет «уроком труда для пилотов и бортинженеров». Кроме того, напряжения добавлял тот факт, что в любой момент что-нибудь могло пойти не так, и тогда результаты оказались бы опасными, плачевными или дорогостоящими.
Миссия STS-61 ознаменовалась успехом, который позволил «Хабблу» стать самым продуктивным аппаратом в истории NASA, получить изображения объектов древнейшей Вселенной, измерить ее размеры и возраст, пронаблюдать возникновение инозвездных планетных систем и других явлений, открытие которых заставило переписать учебники астрономии.
Первый ремонт телескопа имени Хаббла был не просто хирургической операцией, потребовал не одной лишь ловкости человеческих рук, а стал результатом совместных действий людей и элементов роботизации. Человек на конце манипулятора стал его «рабочим органом», а также «глазами и ушами» роботочеловеческой системы планетарного масштаба.
Участники операции действовали в удивительном согласии: космический корабль, команда из пяти человек внутри него на соединении с Хьюстоном посредством голосовой связи, видеосвязи и каналов передачи данных; Николлье, наблюдающий сквозь иллюминатор за Хоффманом и Масгрейвом и точно управляющий всеми сочленениями механической руки; Эйкерс и Торнтон, оперирующие гигантским телеуправляемым «глазом» под руководством другой группы людей из другой части Соединенных Штатов. По мнению Фрэнка Сеполлины, этот полет доказал правоту точки зрения, которую он всегда отстаивал: «Мы не должны проводить программы обслуживания без совместного участия людей и роботов... роботы и люди действуют рука об руку».
В трех ремонтных полетах, которые последовали за первоначальным, — в 1997, 1999 и 2002 годах — астронавты продолжали вносить улучшения в конструкцию «Хаббла». Они добавляли камеры и спектрографы, заменяли износившиеся датчики и батареи и в целом поддерживали электронную начинку орбитального телескопа на современном уровне. Предполагалось, что заключительный полет для обслуживания аппарата состоится в 2004 году, а после него, в 2010 году, специальным рейсом шаттла «Хаббл» будет снят с орбиты и после приземления выставлен на Земле в музейной экспозиции.
Но в январе 2003 года шаттл «Колумбия» разрушился во время входа в атмосферу, при этом погибли семеро астронавтов. Все полеты оставшихся шаттлов были прекращены до тех пор, пока NASA не завершит расследование катастрофы и не переосмыслит свои задачи.
Год спустя после гибели «Колумбии» администратор NASA Шон О'Киф объявил, что ремонт «Хаббла» при помощи челночных кораблей проводиться больше не будет. В качестве довода О'Киф описал возможные риски: поскольку космический телескоп находится на орбите с необычно большим наклонением, астронавты не смогут повстречаться с космической станцией и использовать ее как «запасную гавань» в том случае, если история «Колумбии» повторится и возвращаться в атмосферу на поврежденном шаттле будет нельзя. Но решение О'Кифа было обнародовано через каких-то два дня после того, как президент Джордж Буш объявил об «Инициативе по исследованию космоса», основной задачей которой виделось возвращение людей на Луну. Полеты на низкую околоземную орбиту тогда вышли из фавора. Космические обозреватели рассматривали «Хаббл» как первую «вероятную жертву» новой политики Буша.
Сторонники продолжения работы телескопа принялись убеждать лиц из NASA и конгресса в необходимости отменить фатальное решение. Параллельно специалисты в относящемся к NASA Центре космических полетов имени Годдарда начали работать над осуществлением последней серии улучшений «Хаббла» в ходе непилотируемого полета автоматического аппарата. Начиная с марта 2004 года команда более чем из тысячи человек — в основном базировавшаяся в Центре Годдарда, но включавшая специалистов из других многочисленных относящихся к NASA организаций, а также нанятых по контрактам — более года прорабатывала эту задачу, имея целью выполнить операцию в 2008 году. Проект прошел через стадии предварительной оценки.
Майкл Гриффин, скептически относившийся к успеху автоматического аппарата в этой роли, стал администратором NASA в 2005 году. Его недоверие было подкреплено заключением Национального совета по исследованиям США, в котором полностью автоматический подход оценивался как чрезмерно рискованный и рекомендовалось прибегнуть к обслуживанию руками астронавтов. Гриффин немедленно отказался от дальнейшей проработки операции обслуживания роботом и вскоре объявил о предстоящем полете шаттла с той же задачей. Он получил обозначение SM4 (сокращение английской фразы «Программа обслуживания номер 4») и в конце концов состоялся в 2009 году как миссия с обозначением STS-125.
Автоматическая операция по ремонту, разработанная в Центре Годдарда, так и не была реализована. Тем не менее она заслуживает внимания с целью сопоставления ремонтных работ в космосе, проводимых роботом и человеком. Более того, планы, разработанные для робота, в итоге повлияли на то, как были спланированы действия в рамках пилотируемого полета, и это дает нам еще один пример совместного развития человеческих и телеуправляемых систем.
Команда из Центра Годдарда пришла к выводу, что планирование автоматической ремонтной программы является чрезвычайно сложной задачей, особенно в отношении инструмента наподобие «Хаббла», который был спроектирован для обслуживания людьми, а не роботами. Капризные гироскопы «Хаббла», например, были «упакованы» глубоко внутри конструкции космического телескопа. Шестерым астронавтам приходилось влезать по пояс внутрь аппарата для их замены. Во время трех предшествовавших программ обслуживания восемь гироскопов были заменены, и каждый раз эта операция была сопряжена с проблемами.
Артур Уиппл, инженер-разработчик систем как для автоматической операции обслуживания, так и для традиционной с участием людей, заключил, что, невзирая на все усилия по автоматизации процесса, «узел, который спроектирован так, что его сложно установить, нельзя упростить, как бы отчаянно вы над этим ни работали». Было сложно представить, что робот сумеет проникнуть внутрь корпуса «Хаббла» тем же образом, как это делал Хоффман, поэтому команда Центра Годдарда в итоге решила установить новые гироскопы на наружной стороне одного из блоков съемочных камер. Также они заключили, что в целом правильно при проектировании предусматривать возможность замены оборудования при помощи робота, то есть устанавливать его снаружи космического аппарата с возможностью простого доступа и демонтажа. Что хорошо для роботов, то хорошо и для людей; что затруднительно для людей, то, как правило, гораздо труднее сделать роботу.
Годдардовцы спроектировали набор экзотических инструментов для открывания створок, их фиксации в открытом положении и для размещения других инструментов. Позже эти приспособления были адаптированы для использования людьми. В полет по последней программе обслуживания, SM4, отправились не только семеро членов экипажа, но еще и 66 ремонтных инструментов, использовавшихся в предыдущих программах. Кроме них имелось более сотни полностью новых инструментов, изначально разработанных для роботов.
Один из этих экзотических инструментов просто крепился на сам аппарат. Инженеры NASA хотели заменить электрические платы глубоко в «потрохах» орбитального телескопа, но возможность ремонта этих плат, в отличие от замененных ранее элементов, не была изначально предусмотрена. Для их замены надо было вывернуть десятки маленьких винтиков. Работая над программой автоматического ремонта, инженеры из Центра имени Годдарда придумали специальную пластину-уловитель, которая крепилась на обшивке «Хаббла». В полете по программе SM4 она позволила астронавтам удалять винты так, что те не улетали прочь, и не попасть снова в ситуацию «великой охоты на винтик». Благодаря этому команда ремонтников сумела выполнить серьезную операцию по замене оборудования, которая потребовала выворачивания более чем сотни винтов, а затем удалить всю пластину-уловитель как единое целое вместе с уловленными ею мелкими деталями. «Проектирование и испытание инструментов для роботов заставило нас по-новому взглянуть на значение специализированных приспособлений для людей», — говорит Уиппл.
Программа SM4, выполненная в ходе миссии STS-125, оказалась наиболее плодотворной из всех программ обслуживания телескопа имени Хаббла. И как минимум отчасти ее успеху способствовали инструменты, созданные для роботов. Также в процессе этой миссии случилось несколько непредвиденных ситуаций, с которыми роботам было бы непросто справиться. Например, однажды астронавт Майк Массимино удалял ненужный поручень, и оказалось, что у одного из удерживавших его болтов сорвалась резьба. Удалить болт при помощи ручного инструмента не получалось. Немного помешкав, Майк просто оторвал весь поручень.
Сопоставляя пилотируемую и автоматическую программы обслуживания, команда Центра Годдарда оценила разницу во времени: автоматическая программа должна была длиться 73 дня, их них 61 день продолжалось само обслуживание. Ее пилотируемый аналог продлился лишь 13 дней от запуска до посадки, при этом работы на «Хаббле» заняли 6 дней.
Уиппл подчеркивает, что обслуживание силами людей эффективно, но ограничено во времени, тогда как автоматические программы могут длиться дольше и не иметь столь жестких ограничений. Задержки в линиях связи еще больше замедляют процесс за счет того, что цикл действия и восприятия реакции на него в каждой удаленной манипуляции посредством роботов особенно растягивается. Уиппл обнаружил тонкую взаимосвязь между факторами стоимости, сложности, необходимого времени и фактором «действующего лица» — робота или человека. Согласно ему, это «совокупность, непрерывная и развивающаяся в направлении от производимой людьми внекорабельной деятельности к использованию автономных роботов».
Как бы ни впечатляла нас история программ обслуживания «Хаббла», по сути, они были механическими операциями, не так уж сильно отличающимися от задуманной еще фон Брауном регулярной замены фотопленки. Уникальные возможности людей обусловлены их ловкостью в выполнении механических манипуляций в сочетании со способностью человека воспринимать физические условия, в которых находится его тело. Но выявленный исследователями из Центра Годдарда фактор времени связывает программы ремонта объектов в космосе с гораздо более широкими аспектами нашей исследовательской деятельности.
Ведущий исследователь проекта Mars Exploration Rover (MER) Стивен Сквайерс часто упоминает о безнадежно медленном темпе, в котором у них идут работы. «Потребовалось четыре года, чтобы выполнить недельный объем полевой съемки! — пишет он. — Все продвигалось просто мучительно медленно». И в этом его мнение перекликается с мнением Уиппла по поводу программ обслуживания «Хаббла»: роботы медлительны, особенно если принять во внимание естественные задержки сигнала при операциях в далеком космосе (в случае «Хаббла» речь шла о секундах, для Марса задержка составляет 20 минут). Ученые, в частности полевые геологи, отстаивают точку зрения, что человек, взаимодействуя с исследуемой средой в реальном времени, имеет возможность по-настоящему глубоко вникнуть в ее сущность.
Фактор времени, таким образом, отсылает нас через Луну и Марс к полевой геологии — отрасли науки, которой Боб Баллард учился при помощи своего «Элвина» и дистанционно управляемых подводных аппаратов — как к области, где и люди, и роботы играют свои роли в космических исследованиях.
Кип Ходжес, директор и основатель Школы земных и космических исследований при Университете штата Аризона, — опытный полевой геолог. О своей работе он говорит так: «Она лучше всего выполняется одним или двумя геологами, которые работают в поле сами по себе», перемещаясь по местности, отрабатывая многочисленные гипотезы, которые развиваются в процессе исследования, когда ученые останавливаются для изучения найденных образцов и корректируют свой план в соответствии с новой информацией. Конечная цель работы геолога — построение геологической карты, которая обуславливала бы правдоподобные версии геологической истории изучаемой области. Кип подчеркивает, что характерная черта геологии как науки заключается в том, что «она полагается на творческое мышление больше, чем на выполнение действий по правилам». С точки зрения Ходжеса, выполнять работу полевого геолога «автономные роботы, кажется, не в состоянии».
Ирония заключается в том, что эта наука, занимавшая ведущее место в исследовании, как правило, географически удаленных территорий, оказалась в сложном положении в XX веке. Историк Наоми Орескис указывает, что американские геологи десятилетиями отвергали теорию тектоники плит отчасти по той причине, что она ставила под угрозу любимые ими практические методы полевой геологии. Крупномасштабные теории вроде этой основывались на расцвете методик лабораторных исследований и наук, оперирующих количественными характеристиками. Выбор между различными базовыми теориями для полевых геологов был во многом выбором между двумя различными образами жизни. Здесь же коренится успех, которого Боб Баллард добился в своих геологических исследованиях под водой при помощи «Элвина» (и с этим же связано нежелание геологов в последующем работать в океанских глубинах посредством удаленного присутствия, при помощи роботов, передающих большие объемы данных).
Несмотря на невыразимый словами, интуитивный характер полевой геологии, именно эта отрасль науки добилась самого блистательного успеха в рамках программы. Этот успех стал плодом сотрудничества астронавтов и геологов, которые обучали и тренировали их. Отработав посадку своего аппарата на Луну, астронавты, готовившиеся по программе «Аполлон», начинали уделять бо́льшую часть времени тому, что собирались делать непосредственно на поверхности естественного спутника Земли. Они с головой уходили в тренировки по геологии, сотрудничая с геологами и планетологами, чтобы усвоить принципы практической геологии. Астронавты получали достаточно знаний, чтобы претендовать на ученую степень магистра в полевой геологии, и очень серьезно относились к своей работе. Выполненные ими впервые в истории съемки маршрутов на Луне остаются уникальными примерами работы человека на иной планете.
NASA отдало должное этому изменению, когда для заключительного полета на Луну по программе «Аполлон» «Аполлона-17» отстранило от работы опытного летчика-испытателя, заменив его на еще не летавшего в космос Харрисона Шмитта, который имел ученую степень доктора в области геологии. Похоже было на то, что включение ученого в экипаж «Аполлона-17» стало милостью, оказанной научному сообществу, признанием важности его вклада, а также своего рода «квантовым скачком» в качественных возможностях научной работы. Так или иначе Национальная академия наук США и другие группы, поддерживавшие это изменение в составе экипажа, встретили включение в него Шмитта овацией.
Но не все ученые разделяли этот всплеск радости — был как минимум один имевший непосредственное отношение к исследованиям Луны геолог, который считал это событие недобрым знаком. По его мнению, Шмитт, поработав на Луне, сделал несколько скоропалительных выводов, и, с его точки зрения, предпочтительнее выглядела работа астронавтов, которые вышли из рядов летчиков-испытателей: имея подготовку на уровне магистра, они работали в манере лаборантов или хорошо подготовленных аспирантов. Астронавты были глазами и руками наземной команды ученых, не пытаясь самостоятельно выносить суждения в области науки. «Хорошо обученный астронавт может говорить о тех же вещах, что и хорошо обученный геолог. Но все прочие астронавты гораздо лучше следовали плану, и их действиями было проще управлять».
Этому участнику научной команды астронавты виделись в той же роли, что и ремонтники «Хаббла», закрепленные на конце руки-манипулятора шаттла: мобильные «глаза» и «руки» на местности, привязанные к цепочке экспертов, которые с их помощью видят и действуют. На самом деле Ходжес, который все еще работает вместе со Шмиттом, описывает работу по программе «Аполлон» как «в основном связанную с телеуправлением», поскольку «закулисная команда ученых использовала астронавтов как инструменты для получения и проверки данных, которые подвергались анализу здесь, на Земле».
Джим Хид, геолог из Университета Брауна, обучал астронавта Дэйва Скотта полевой геологии для полета на «Аполлоне-15». Хид подчеркивает, что немаловажно было также давать астронавтам «волю» и возможность принимать самостоятельные решения. Критически важно было все делать вовремя, и ограниченность времени в сочетании с постоянно нависающей необходимостью добиться поставленных целей означала, что люди должны были знать достаточно, чтобы быстро работать и перемещаться по лунному ландшафту (конечно, спешка была вызвана в том числе самим присутствием людей, располагавших ограниченными ресурсами систем жизнеобеспечения).
Правильнее представлять себе не отдельных людей, которые сами по себе блуждали по Луне, а астронавтов как часть исследовательской системы. В проекте «Аполлон» они связывались по радио со своим коллегой, остающимся на орбите Луны, а также с Центром управления полетом в Хьюстоне. Они ездили на лунном ровере, который был оснащен телевизионной камерой с передатчиком, способным транслировать телесигнал непосредственно на Землю. В наиболее поздних полетах, кстати, наземный оператор получил возможность управлять наклоном и поворотом камеры и таким образом следить за работой астронавтов (с помощью этой камеры даже выполнили съемку момента, когда астронавты в лунном модуле стартуют в обратный путь домой).
От использования дистанционно управляемой камеры на самом деле оставался лишь маленький шажок до осознания того, что наземная команда может управлять движением самого ровера-планетохода через тот же самый канал связи. Вообще-то в 1970-х годах Советский Союз запустил на Луну два ровера, известных как луноходы, и они дистанционно управлялись при помощи джойстиков с наземных станций. Сравнительно малая задержка в передаче сигнала между Землей и Луной — всего несколько секунд — дает возможность широко использовать операции такого типа в лунных условиях. И все же NASA так и не послало туда телеуправляемый самоходный аппарат (хотя сейчас есть проекты с частным финансированием, направленные именно на это).
Описанный спектр аспектов лунной полевой геологии — от ученых-исследователей и астронавтов-лаборантов до дистанционно управляемых почти в реальном времени планетоходов — наводит на вопрос: какой тип присутствия людей требуется, чтобы вести научные исследования на других планетах?
Поиск ответа на этот вопрос мы начнем с мысленного эксперимента. Давайте вспомним, какую территорию охватила деятельность астронавтов на Луне вне корабля во время полета «Аполлона-17»: суммарная продолжительность трех выходов составила 22 часа, и за это время они преодолели около 35 км. Если бы это расстояние было пройдено по одной большой окружности, то охваченная площадь составила бы около 100 кв. км2.
Теперь представим себе лунного робота-«прыгуна». Джефф Хоффман, который уже уволился из отряда астронавтов и преподает в Массачусетском технологическом институте, не так давно работал над проектами подобных машин. Импульсы тяги от небольшого ракетного двигателя могут подбрасывать такого робота, заставляя его совершать «прыжки» над лунной поверхностью. Поскольку на Луне сила тяжести мала и составляет одну шестую от земной, такие прыжки могут покрывать многокилометровые расстояния.
Пусть в нашем мысленном эксперименте лунная экспедиция стартует с Земли и представляет собой садящийся на Луну аппарат-контейнер, в котором находятся два таких робота. После прилунения первый «прыгун», который специально оснащен для картографирования местности, отстыковывается и прыжками окаймляет зону площадью 100 кв. км. Установленные на нем камеры высокого разрешения, лидары, спектрометры и другие датчики выстраивают карту поисковой территории. Робот записывает оптические снимки, топографический профиль, выполняет другие измерения в высоком разрешении с точностью до миллиметров. Бортовые компьютеры обрабатывают все данные для их отправки на Землю через телеметрический канал, а в хьюстонском Центре управления полетами опытные специалисты по цифровой картографии собирают из них поисковую карту миллиметрового масштаба.
Затем эта информация предоставляется команде геологов, которые в течение нескольких последующих месяцев изучают весь массив данных в привязке к топографической карте территории на экранах своих компьютеров. Они используют очки виртуальной реальности или специальные комнаты виртуального погружения, которые позволяют имитировать перемещение по местности. Поскольку данные имеются в мельчайших подробностях, ученые могут виртуально «останавливаться» на интересующих их участках для детального изучения (хотя, конечно, у них не получится переворачивать пинком камни). Ученые работают совместно и имеют возможность останавливаться и подробно обсуждать, что именно они видят и куда им лучше направиться дальше.
Несколько месяцев спустя команда ученых суммирует свои выводы и определяет интересующие их участки в пределах поисковой территории. Они разрабатывают план отбора образцов и предоставляют его инженерной группе, которая переводит их в набор инструкций, планов и траекторий перемещения для «прыгуна» номер два, который все это время спокойно ожидал своей очереди, сидя на поверхности Луны.
Задача этого «прыгуна» — не съемки, а бурение, соскабливание, дробление молотком и забор проб. Получив программу на исследование, допустим, ста точек, привязанных к поисковой карте, построенной его компаньоном, второй «прыгун» начинает работу и за несколько дней методично отбирает образцы грунта и камней, возвращая их на основной аппарат.
В аппарате-контейнере набор лабораторных инструментов проводит расщепление и анализ полученных проб. Более совершенный вариант может даже сортировать образцы, заключать их в защитные капсулы и загружать в маленькую ракету, которая потом стартует с Луны и доставит их на Землю (как это делали советские станции серии «Луна» в 1970-х годах).
Вся программа исследований занимает от трех до шести месяцев — это намного дольше, чем те три дня, в течение которых «Аполлон-17» оставался на поверхности Луны.
Я не хочу здесь продвигать идею или проект подобной программы, хотя она вполне реальна с точки зрения современных технологий. Этот мысленный эксперимент был поставлен затем, чтобы задать себе вопрос: что же именно астронавты на Луне делали такое, что было бы недоступным для геологов на Земле, изучающих трехмерные модели сверхвысокой детализации? Они могли воздействовать на грунт? Пользоваться преимуществами «владения ситуацией» и «реального присутствия»? Взаимодействовать со средой в реальном времени? Давайте посмотрим на фактический опыт работы про программе Mars Exploration Rover — он поможет нам ответить на эти вопросы.
Два мобильных робота «Спирит» и «Оппортьюнити» были запущены с Земли в 2003 году и достигли точек посадки на противоположных сторонах планеты Марс в 2004 году. Набор камер, научной аппаратуры и инструментов позволял им путешествовать по местности на расстояние до нескольких километров, картографировать ландшафт, а также бурить и анализировать камни и грунт. Общей задачей научных исследований было выяснить, имелась ли на Марсе когда-либо прежде вода. Конечной же их целью являлся поиск признаков внеземной жизни.
И хотя оба ровера были спроектированы из расчета на работу в течение лишь 90 марсианских суток (которые принято называть солами), в действительности они проработали во много раз дольше. «Спирит» застрял в песчаной дюне в 2009 году, и в 2010 году связь с ним была окончательно утрачена. «Оппортьюнити» продолжает работу даже десятилетие спустя планировавшейся даты выхода из строя. По состоянию на 2014 год «Оппортьюнити» преодолел расстояние 40,25 км, и это больше, чем суммарно проехали астронавты на ровере «Аполлон-17» (35,7 км), и больше, чем прошел «Луноход-2» (39 км), — таким образом, установлен рекорд по длине дистанции, пройденной аппаратом на иной планете.
Все эти годы марсианскими роверами управляли из подразделения NASA — Лаборатории реактивного движения (JPL) в городе Пасадена, штат Калифорния. Там, сидя в комнатах без окон, инженеры и ученые отдавали роверам команды, обрабатывали полученные данные и в целом занимались исследованиями Марса (по окончании первых нескольких месяцев «номинальной» программы многие из ученых возвратились в свои научные организации, тем не менее продолжая участвовать в исследованиях планеты через Интернет).
Роверы зависят от снабжения, осуществляемого при помощи солнечных батарей, поэтому основная часть операций должна совершаться в течение марсианского дня, который примерно на 40 минут длиннее, чем день на Земле. Иногда день на Марсе совпадает с дневным временем суток на Земле — и это означает, что участники наземных команд в Пасадене могут работать как все. Но в другое время бывает наоборот, и их рабочие часы смещаются странным образом. Некоторые члены команд завели привычку носить по несколько наручных часов — отдельно для земного времени, отдельно для марсианского. В конечном итоге напряжение, которое испытывали люди, работавшие по необычным графикам, или «синдром межпланетной смены часовых поясов», действительно стал негативно сказываться на темпах научной работы с данными роверов.

Тем не менее в первом десятилетии текущего века появилось небольшое число людей, которые привыкали ехать утром на работу, чтобы приступить к выполнению задач на другой планете, в то время как недалеко от них боевые расчеты «Предейтора» тоже ехали на работу, чтобы вести войну на другом континенте.
Это была необычная работа. Геологи, которые, вполне вероятно, выбрали для себя такую специальность, потому что любили походы на вольном воздухе вдали от городов, оказались запертыми в комнатах с кондиционерами, таращились на экраны мониторов и собирались на рабочие совещания, но в то же время жили в отрыве от своих семей. Их работа требовала от них более тесного взаимодействия, чем традиционная полевая геология, а также координации людей и машин при помощи ограниченных задержками во времени и в пропускной способности линий связи между двумя планетарными средами.
Билл Клэнси — компьютерный ученый и когнитивист, который изучал вопрос использования роботов в изолированных средах в Арктике. Когда он переключил свое внимание на сотрудников JPL, работавших с марсианскими роверами, он заинтересовался опытом удаленного присутствия ученых на далекой планете.
На публике и в прессе, в том числе и в официальных пресс-релизах NASA, роверы MER часто называют «роботами-исследователями». Но, конечно же, они ими не являются. Роботы ничего не исследуют сами, они не имеют своих мнений и не занимаются наукой. Они гораздо больше похожи на подводные дистанционно управляемые аппараты, а не на роботов-исследователей, за исключением того, что присутствуют 20-минутные задержки между отправкой команд и получением ответов от них.
Клэнси стоит на той точке зрения, что роверы — это механизмы-«посредники» для действий людей, продолжение глаз и рук тех, кто ими управляет с Земли. Они скорее являются программируемыми мобильными лабораториями, чем учеными, заместителями физического присутствия, а не познающего субъекта. Клэнси пишет, как ученые говорили о том, что сами «становились роверами». В тех же самых выражениях, как и пилоты БПЛА «Предейтор», ученые рассказывали, как «проецировали себя в ровер» и обнаруживали, что, например, вертели головами, чтобы увидеть, что у ровера позади, вытягивали шеи, чтобы заглядывать за камни, как будто бы сами находились там, на Марсе. «Это была какая-то странная взаимосвязь человека и машины, — рассказывал один из ученых. — Машины превращались в нас, а мы — в машины». Другой уверял: «Мое тело — это всегда ровер».
Памятуя об этом проецировании, какой же смысл можно придать понятию «робот-исследователь»?
Этот вопрос заставил Клэнси углубиться в миры полевой геологии и удаленного присутствия. Он обнаружил, что в отчетах программы машине зачастую «приписываются инициативы, которые на самом деле являются результатом удаленно выдаваемых команд»: например, «Спирит» выполнил дополнительную съемку правого переднего колеса».
Ведущий исследователь Стивен Сквайерс убедительно и захватывающе пишет о том, что называет «чем-то вроде диковинного сочетания планетарных исследований, робототехники и искусства управления» — а всеми этими вещами он занимался профессионально — «на службе геологии, изучающей иной мир». Когда Сквайерс описывает работу своей команды, он зачастую выражается так, будто бы сами члены команды были на Марсе. Например: «Мы отработали по всей равнине...» или «Мы прибыли в кратер Эндьюранс...», упоминая о «склоне прямо перед нами». Клэнси понял, что так же, как это происходило в пункте управления «Ясоном», у команды MER вырабатывалось яркое ощущение присутствия на изучаемом ландшафте. «Мы все там были, все вместе, посредством робота!»
В среднем расстояние между Марсом и Землей составляет 225,3 млн км, и это означает, что для того, чтобы посланная с Земли команда достигла ровера, преодолевая это расстояние со скоростью света, требуется около 12 минут. Столько же, 12 минут, надо и на то, чтобы результаты выполнения команды, какими бы они ни были, стали известны на Земле (хотя фактическое время задержки сигнала варьирует в пределах от 3 до 22 минут). На практике это приводит к тому, что инженеры из команды управления отправляют набор команд на роверы и изучают их результаты примерно раз в сутки.
Те, кто следит за ходом программы, часто полагают, что такие временные задержки исключают возможность действительно ощутить свое присутствие на Марсе. Но исследования Клэнси доказали обратное: задержки заставляют работать в ежедневном цикле, «который вызывает у своих участников чувство синергетического взаимодействия, как будто они действительно находятся на другой планете». По опыту работы с «Ясоном» ученые научились превращать пункт управления в проводимый в реальном времени на океанском дне научный семинар. В случае с Марсом этот суточный цикл заставлял специалистов глубоко сосредоточиваться на изучении только что полученных данных, и это в самом деле усиливало ощущение присутствия на месте.
«Спирит» и «Оппортьюнити» работают не как автономные существа, а, напротив, как физические заместители ученых, точнее, их тел и органов чувств. С точки зрения восприятия вся работа все равно делается в Пасадене, она лишь смещена в пространстве (на миллионы километров) и во времени (в суточный цикл). Как и операторы БПЛА «Предейтор», которые испытывают ощущение присутствия за счет своего социального окружения, ученые чувствуют, будто работают на Марсе, благодаря своему восприятию; их работа в команде, вся совокупность межпланетных средств и роверы складываются для них в определенный когнитивный процесс. Наземная команда наблюдает объекты окружающего мира, изучает данные и снимки, принимает решения, отправляет инструкции роверам, анализирует результаты их выполнения, и, по словам Клэнси, это «ежесуточный цикл телеуправления, оценки и программирования». То, что этот цикл занимает целые сутки, а не миллисекунды, за которые геолог ударяет молотком по камню в земной пустыне, по большому счету не важно.
А теперь вспомним часто повторяемую жалобу Сквайерса о том, что работа с роверами продвигается медленно: «Потребовалось четыре года, чтобы выполнить недельный объем полевой съемки! Все продвигалось просто мучительно медленно». Его возмущение трудно понять. Если исходить из этих слов, то людей на Марс следовало бы послать ради скорости их работы — конечно, мало кто считает это уважительной причиной. За сотни миллиардов долларов можно послать на Марс людей, чтобы они пробыли там несколько месяцев, тогда как роверы уже более десяти лет позволяют нам работать на Марсе — за цену, сопоставимую со стоимостью одного запуска шаттла.
Клэнси объясняет слова Сквайерса отражением меры ощущаемого учеными присутствия на реальном ландшафте. Телеуправляемые аппараты могут способствовать ощущению присутствия, но за это приходится платить определенную цену. «Ученые оказываются отделены от того ландшафта, по которому они хотели бы пройтись», — отмечает Клэнси. — Добиваясь успеха при использовании цикла удаленного управления роботами, исследователи начинают хотеть большего — тот уровень имитации присутствия, который предоставляют роверы, «сносный, но не приносит удовлетворения». Примерно так же отзываются об этом и пилоты «Предейтора».
В мысли о том, что якобы «геологи за минуту сделали бы работу, которую марсоходы выполняют за день», ученые усматривают фундаментальную ошибку. Наличие задержки сигнала на самом деле стимулирует научную группу к тому, чтобы тщательно анализировать получаемые данные, обдумывать их и вырабатывать обоснованное и согласованное решение, как действовать дальше. Так же, как и в пункте управления «Ясоном», наземные команды ученых могут обсуждать между собой дальнейшие действия — новые планы работы в пространственно-временной привязке.
Одной из причин того, что роверов называют «роботами-геологами», является впечатление, будто они действуют автономно. И хотя это не так, сама идея о том, что операторы взаимодействуют с аппаратами и виртуально погружаются в иную среду посредством канала связи с 20-минутной задержкой, оставляет место для определенной автономии роверов. Понятно, что «Оппортьюнити» должен быть способен реализовывать некоторые локально сформированные команды в долгих промежутках между поступлением инструкций с Земли. И действительно, он выполняет без вмешательства человека множество операций в циклах обратной связи и служебных задач для управления научными инструментами и поддержания систем ровера в исправности.
Но на практике автономия ровера для инженеров, которые им управляют, является ресурсом, который они могут использовать или не использовать. Например, ровер может самостоятельно проложить себе путь по россыпи камней или других препятствий, анализируя изображения, полученные его собственной камерой при помощи программы автоматической навигации. Но в этом режиме через каждые 10 секунд он останавливается и в течение следующих 20 секунд вновь «разглядывает» местность. Такая автономия стоит дорого в отношении времени — ведь ровер может ехать в три раза быстрее, когда следует заранее заданному плану перемещения. В другом автономном режиме ровер может выбирать для исследования камни по набору заданных учеными критериев. В обоих случаях автономный режим служит для выполнения определенных задач, настраивается и включается людьми-операторами и имеет свою цену: для того чтобы ровер мог двигаться быстрее, необходимо затратить многие часы на анализ и планирование.
По словам Клэнси, автономия в данном случае — «совокупность взаимоотношений между людьми, техникой и целевой средой». И снова мы обнаруживаем, что автономия аппарата имеет смысл лишь в определенном контексте. Один из инженеров-конструкторов автоматики марсохода был «удивлен», что робот, в разработке которого он участвовал, попав в реальные условия, стал работать скорее в качестве «партнера» и участника совместной работы наземной команды, чем самостоятельно действующего аппарата. Так нередко удивляются те инженеры, чье выработанное в лабораторных условиях понимание автономности сталкивается с реалиями использования роботов в действительности.
Некоторые утверждают, что, если бы люди присутствовали на Марсе, они более результативно выполняли бы работу. Но откуда эта необходимость в результативности, в возможности выполнять больший объем работы за меньшее время? «Ну, — следует ответ, — если время полевой работы геолога стоит очень дорого и геологу его трудно заполучить, то, конечно, надо постараться добыть как можно больше сведений за наименьший период». Но ведь полевой сезон марсоходов MER длится уже не менее десяти лет. И, более того, время между последовательно наступающими солами продуктивно используется учеными, чтобы привести в порядок свои мысли, достичь взаимного согласия и спланировать последующие действия.
Астронавты «Аполлонов» часто говорят о том, что их работа в полете проходила в спешке и им приходилось выполнять большое количество заданий в ограниченное время, причем эти ограничения были вызваны их собственным присутствием. Если наука — это интеллектуальное занятие, то, может быть, имеет смысл растягивать во времени процесс осознания?
Я спрашивал полевых геологов, что именно в их работе требует взаимодействия со средой в реальном времени. Что они потеряют, если сам рабочий процесс станет длиться дольше? После нашей дискуссии Кип Ходжес заявил: «Я не могу придумать ни одной причины, по которой полевому геологу надо было бы реагировать быстро».
Вспомните, что является нашей задачей, — геология. Где бы то ни было: под водой, на поверхности Земли, на Луне или на Марсе. Она изучает среды, которые, как правило, не менялись на протяжении миллионов или даже сотен миллионов лет. На их изучение времени предостаточно.
Конечно, можно назвать случаи, когда приходится иметь дело с быстро протекающим явлением в динамике реального времени, которое ученые вынуждены исследовать так же быстро. Возможно, речь идет о потоке грязи или лавы или о существах, обитающих внутри глубоководных нор, к которым во время погружений наведывается «Элвин». Но даже биологи в основном предпочитают наблюдать за своими объектами исследований со стороны, не вмешиваясь в их жизнь, поэтому и им достаточно высокоскоростных записывающих устройств. В межпланетных исследованиях мы изучаем явления, которые протекают медленно; разницы в эффективности между двухнедельным пилотируемым полетом (100 млрд долларов) и десятилетней работой автоматов (1 млрд) в отношении сбора и изучения камней нет.
Дэн Лестер, астроном из Университета штата Техас, утверждает, что нам следует переосмыслить традиционную концепцию освоения космоса. Несмотря на то что уже сейчас ученые с помощью марсоходов занимаются именно освоением другой планеты, NASA до сих пор применяет термин «освоение космоса» лишь к пилотируемым полетам, в то время как конгрессмены предпочитают говорить о «присутствии человека в космическом пространстве», подчеркивает Лестер. «Когда конгресс подкрепит слова о "присутствии человека в космическом пространстве" 17 млрд долларов для агентства, — пишет Дэн, — они обретут кое-какую весомость».
Почему же присутствие человека на Марсе непременно должно означать «попрание марсианского песка ногами», в то время как удаленного присутствия, возможность которого нам предоставляют «Спирит» и «Оппортьюнити», достаточно для того, чтобы ощутить себя в чужеродной среде?
Лестер указывает на фактор, который, по его мнению, «не позволяет напрямую сопоставлять освоение космоса и применение роботов в земных условиях». Этот фактор — задержка в передаче команд управления и данных. Как утверждает Лестер, именно эта задержка делает любое ощущение присутствия на Марсе «откровенно ущербным». Он полагает, что удаленно присутствовать где-то можно только в том случае, когда задержки сигнала примерно равны человеческому времени реакции, около 200 миллисекунд, что недостижимо на расстоянии между Землей и Марсом.
За 200 миллисекунд луч света проходит расстояние около 30 000 км, и это расстояние Лестер называет «когнитивным горизонтом» — в его пределах мы можем ощущать удаленное присутствие, а за его пределами — нет. Луна находится в шесть раз дальше когнитивного горизонта, а Марс — в тысячи раз дальше.
Дэн Лестер и его коллега по работе в NASA Харли Торнсон отстаивают необходимость непосредственного присутствия человека в условиях Марса, хотя, возможно, и не на самой его поверхности. Если требуется достичь лишь околомарсианской орбиты, то нужно запускать с Земли космический аппарат в два раза более легкий по сравнению с тем, который необходим для дорогостоящей и рискованной вылазки на поверхность планеты. Лестер и Торнсон полагают перспективной возможность «орбитального телеуправления», когда астронавты в корабле, обращающемся на орбите Марса или другого тела, удаленно управляют роботами на его поверхности. «Процесс освоения и изучения космических объектов, основанный на присутствии человека, может и не требовать физического присутствия на месте работ, — пишут они, — но, вероятно, человек должен находиться поблизости... Речь идет лишь о переносе восприятия из одного местоположения, которое может быть относительно недружелюбным, в другое, более комфортное».
Довод о том, что задержка сигнала мешает удаленному присутствию, — это шаг вперед по сравнению со старым мнением, что удаленное присутствие не есть присутствие настоящее. Но этот довод таит в себе новое ложное заключение: якобы присутствие не является настоящим при наличии задержек сигнала. Спросите-ка пилотов «Предейтора», как они ухитряются ощущать себя на месте действия в условиях, когда задержки почти в десять раз больше, чем «когнитивный горизонт» Лестера и Торнсона. Весь собранный Биллом Клэнси при изучении команд управления марсианскими роверами материал, все его богатые эмпирические и систематизированные данные противоречат этому. Что такого в этих задержках, что они разрушают чувство присутствия? Почему мы не можем ощущать себя присутствующими в месте исследования, если данные, которыми мы оперируем, устарели на несколько минут или даже часов?
Если предмет нашего изучения не изменялся в течение миллионов лет, что нам стоит подождать лишние 20 минут? Лестер и Торнсон согласны с тем, что присутствие человека может быть смещено в пространстве, но почему-то отвергают идею, что оно же может быть сдвинуто во времени.
Я не хочу здесь приводить доводы за и против пилотируемых полетов в космос, обоснованием которых всегда были и до сих пор остаются в основном необходимость демонстрации технических достижений, вопросы национального престижа и побед в международном состязании, а не какие-то преимущества, которые они дают в выполнении механических или исследовательских задач. Но полеты в космос сами по себе являются выдающимся примером выполнения различных задач сложными системами из людей и роботов, связанных в пространстве и времени. На низкой околоземной орбите, где задержки сигнала относительно малы, телеуправляемые системы достигают многого, когда ими управляют напрямую. В условиях Луны, где задержки сигнала чуть продолжительнее, удаленное управление имеет большие возможности, еще не изученные и не освоенные NASA. Марс требует иного подхода, поскольку задержки сигнала на пути к нему значительно больше и, значит, нужно распределять во времени присутствие и действия операторов как через методику организации работы, так и при помощи технологий, обеспечивающих автономность аппаратов, и через изобретение новых способов деятельности. Ничто из перечисленного не мешает человеку ощущать себя присутствующим на Марсе, и, мало того, в этом случае мы достигаем возможности коллективного присутствия, что является новым способом вести научные исследования, а также осваивать наш мир и Солнечную систему.
В космосе огромные расстояния вынуждают нас распределять наше восприятие во времени, позволяя нам наблюдать за освоением Солнечной системы посредством автономных аппаратов. То, как мы встраиваем модели нашего мира в автономные устройства здесь, на Земле, является темой следующей главы.

