В море
Тесное, но комфортабельное внутреннее пространство подводной лодки было похоже на нечто среднее между салоном коммерческого авиалайнера и жилым прицепом 1950-х годов. Хотя дело происходило в 1997 году, обстановка вокруг напоминала дешевый ресторанчик времен холодной войны — переключатели, светящиеся трубки, набалдашники и рукоятки, зеленая краска на стенах, линолеум и оборудование из нержавеющей стали. Постоянный приглушенный шелест напоминал мне о том, что я дышу воздухом, нагнетаемым машиной.
Команда из десяти военных моряков переговаривалась на малопонятном техническом жаргоне, обмениваясь инструкциями так, словно они пилотировали самолет («Сьерра, это Виктор, отметь время выполнения»). Как и в самолете, те, кто управлял лодкой, располагались лицом вперед: пилот — слева, второй пилот — справа. Места было так мало, что койка капитана находилась прямо на полу за их спиной. Я стоял рядом со спящим капитаном и, перегнувшись через него, заглядывал пилотам через плечо.
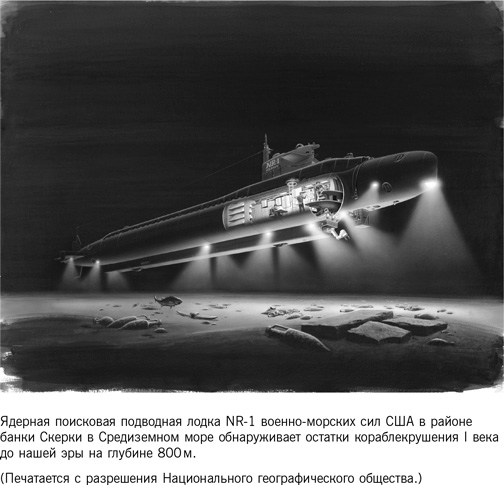
Я был в команде инженеров, океанографов и археологов, которая присоединилась к подводной лодке военно-морского флота США NR-1 и ее плавучей базе — судну «Кэролин Чоэст» — в экспедиции, разыскивающей обломки античных кораблей в Средиземном море. Подводная лодка NR-1 была рудиментом предыдущей эпохи. Ранее она предназначалась для секретных миссий против Советского Союза, а теперь ее приспособили для гражданских целей. NR-1 была построена в 1960-х годах в качестве эксперимента по созданию маленькой атомной подлодки. Ее длина составляла около 45 м, и она могла достаточно долго оставаться под водой. В 1980-е годы она занималась поиском упавших в океан обломков шаттла «Челленджер».
Теперь мы находились примерно в 113 км к северо-западу от Сицилии, в Тирренском море. Поиски велись в районе географического объекта под названием банка Скерки. С воздуха видно лишь морскую гладь, но под водой скрываются два больших каменных рифа, которые и получили название банка Скерки. В древние времена этот коварный подводный рельеф становился причиной многих бед: через скалы проходил главный маршрут судов, курсировавших между Карфагеном (современный Тунис) и римским портом Остией, и немало неудачливых торговых кораблей погибли на этих рифах.
Во время погружения подводной лодки NR-1 я отвечал за поиск обломков этих древних кораблей. Всего несколько часов назад я сидел на плавучей базе вместе с Робертом Баллардом — руководителем исследовательских работ и инициатором всей этой экспедиции. Мы составляли план поисковой операции. Баллард, известный в первую очередь благодаря обнаружению обломков «Титаника», является экспертом в поисках следов катастроф на дне океана. Вместе мы наметили ряд поисковых трасс — регулярных, выверенных проходов по морскому дну, чтобы NR-1 могла охватить бо́льшую площадь. «Придерживайтесь поисковых трасс, — наставлял меня Баллард. — Не рыскайте туда-сюда, как только на сонаре появится новая цель, иначе вы никогда не закончите поиски».
После того как мы закончили планирование, быстрая лодка доставила меня на субмарину. Я ступил на ее черный корпус, не больше чем на пару метров возвышавшийся над уровнем моря. На верху подводной лодки, примерно на высоте человеческого роста, был расположен ярко-красный пост управления или «рубка». Я вскарабкался к люку на боку рубки и спустился через проем в корпусе по узкой лестнице. Когда я оказался внутри, член экипажа закрыл люк за моей спиной. Небо исчезло, и меня захлестнуло ощущение бесповоротности происходящего: мне не выбраться отсюда еще несколько дней. Я стоял в стороне, пока команда готовилась к погружению. Проверки, переклички, передача информации; а затем, приведенная в действие при помощи вентилей, лодка начала плавно опускаться под воду, словно скользя по склону холма.
Моя койка располагалась над узким коридором. Со всех сторон она была окружена трубами и скобами, небольшой просвет имелся только с одного конца. Через него я должен был забираться на койку, класть голову на место и засыпать. Оказавшись на койке, я уже не мог повернуться. Когда я лежал на спине, прямо перед лицом висела гроздь труб, а в нескольких сантиметрах за ними находился стальной корпус подводной лодки. С другой стороны от него были, ну... 900 м воды. Уснув там первый раз, я проснулся от острого приступа клаустрофобии, и мне пришлось немедленно слезть и немного походить, чтобы расслабиться. Во второй раз мое ложе показалось мне более удобным, но я все еще нервничал. Но на третью ночь я уже чувствовал себя как дома.
После нескольких минут погружения мы достигли дна прямо рядом с банкой Скерки, на глубине примерно 900 м, и начали наше путешествие, выискивая признаки, указывающие на обломки кораблей. На борту NR-1 находились сонары бокового обзора, дальность действия которых достигала нескольких сотен метров. Но «изюминкой» NR-1 был ее передний сонар. Каждые несколько секунд он пробивал подводное пространство импульсом высокочастотного звука, затем собирал эхосигналы и отображал их на экране компьютера. Сонар был разработан для того, чтобы разыскивать советские подводные лодки подо льдом. Установленный на NR-1, он «смотрел» вниз и вперед по отношению к субмарине. Он мог различить банку из-под газировки с расстояния примерно 2700 м (а на дне Средиземного моря мы видели достаточно много таких банок).
Проблема была в том, что сонар отображает только «цели» — расплывчатые пятна, состоящие из пикселей. Чтобы выяснить, что это за предметы, команда должна была осторожно подводить лодку к каждой цели и разглядывать ее вблизи либо просто из иллюминаторов, либо с помощью многочисленных камер NR-1. А NR-1 была довольно медленной, рядом с дном она могла идти со скоростью лишь 1,8 или 3,7 км/час, то есть примерно как вышедший на прогулку человек. Если мы что-то обнаруживали на расстоянии 2700 м от нас с помощью сонаров, то нам могло потребоваться несколько часов, чтобы добраться до этого места и рассмотреть его вблизи.
Примерно через час после того, как мы начали погружение, Скотт — лейтенант, находящийся на ходовой вахте и также исполняющий обязанности оператора-акустика, что-то заметил на дисплее. Цель была шириной не более чем несколько пикселей, но Скотт предположил, что это может оказаться предмет, созданный руками человека. Эта вещь имела более плотную внутреннюю часть, окруженную, как ореолом, кольцом менее плотных отражений. Скалы на экране сонара выглядят не так. Когда мы двигались по направлению к цели, положение и вид пятна не менялись, хотя угол падения луча сонара изменился. Это еще раз указывало на нечто плотное, вещественное и, возможно, искусственного происхождения. Скотт посоветовал нам отклониться от поисковой трассы и приблизиться к предмету.
Мы только начали наши поиски, которые, как предполагалось, должны были продлиться два дня, и мне уже предстояло принять важное решение. Всего час или два назад Баллард рекомендовал не отклоняться от поисковых трасс. Но я должен был доверять команде. Если это изменение маршрута окажется напрасной затеей, в дальнейшем я смогу отказывать в подобных просьбах.
Я спустился на смотровую площадку NR-1 — в тесное отделение с маленькими иллюминаторами, расположенное внизу корпуса. Мы неторопливо плыли примерно в 12 м от дна. Снаружи я видел только неразличимую муть, зеленеющую в свете огней NR-1. Сощурившись, я смог различить песок, а движение ощущал лишь тогда, когда, нарушая эту монотонность, навстречу проплывал песчаный гребень или камешек. Пока мы приближались к таинственной цели, я готовился к тому, что увижу груду камней.
Но то, что выплыло из зеленой мути, наполнило мою душу благоговейным трепетом. На морском дне покоилось больше ста древних керамических сосудов. Они были разбросаны по дну, но явно можно было выделить две кучи на расстоянии примерно 10 м друг от друга. Это было место древнего кораблекрушения. Оно произошло очень давно, деревянный корпус корабля сгнил, оставив груз лежать так, как он был сложен в трюме. Свинцовые штоки, сохранившиеся от двух свинцовых якорей, позволяли четко опознать нос корабля. Обломки были совершенно нетронутые, их никто не видел, к ним никто не прикасался с тех пор, как они оказались здесь более двух тысяч лет назад. Я был первым человеком, увидевшим их с тех пор, как они затонули, и меня поразили бездна прошедшего времени и сила физического присутствия, перебросившего мост в прошлое.
Я назвал наше открытие «Скерки D» — это было научное описание четвертого известного места кораблекрушения в районе банки Скерки. Мы сообщили о нем нашим коллегам на поверхности по подводному телефону — скрипучему, неустойчивому каналу связи, который передавал голоса не лучше, чем старая рация. Тщательно отметили место находки и сделали множество фотографий.
В конце нашего путешествия, спустя примерно полтора дня, мы планировали подняться на поверхность. Наверх через скрипящий подводный телефон был передан четкий официальный запрос о том, какая погода на поверхности. Надвигался шторм, из-за которого нам было небезопасно отправляться назад, на «Кэролин Чоэст». Поэтому мы вернулись к «Скерки D» и сделали еще несколько фотографий. NR-1 была оборудована колесами, поэтому мы просто отодвинулись от места кораблекрушения на несколько сотен метров и посадили субмарину на дно. Так мы и сидели почти двое суток на глубине 900 м, ожидая улучшения погоды и развлекая себя просмотром военных фильмов в крошечной кают-компании.
В конце концов, мы дождались сообщения о том, что погода проясняется, и поднялись на поверхность так же быстро, как и погрузились.
Я вернулся на «Кэролин Чоэст», чувствуя себя умиротворенным, но взволнованным результатами нашей удачной охоты. Мои коллеги на борту имели зеленоватый цвет лица, страдали от морской болезни и были утомлены последними нелегкими днями. Мы в самом деле пребывали совсем в другом мире, находясь от них на расстоянии меньше полутора километров, но глубоко внизу.
То, что последовало дальше, было естественным экспериментом, в ходе которого я мог сравнить эмоциональную силу облеченного в плоть и кровь опыта с познавательной силой дистанционного присутствия, поскольку я был не настоящим подводником, а инженером-робототехником. Период времени, которое я физически провел на морском дне, был ничтожным по сравнению со временем дистанционной работы, которую я проводил посредством удаленно управляемых роботов и волоконно-оптических кабелей.
Моим «родным» аппаратом был дистанционно управляемый робот «Ясон», разработанный и построенный Лабораторией глубоководных погружений Института океанографических исследований Вудс-Хоул. «Ясон», аппарат размером с фольксваген, пережидал непогоду, принайтовленный к палубе «Кэролин Чоэст». Как только погода наладилась и NR-1 поднялась из глубин, мы быстро запрограммировали «Ясона», чтобы провести серьезное исследование места кораблекрушения под управлением компьютера.
Мы сидели на борту судна в полутемном пункте управления с кондиционированным воздухом, в то время как «Ясон», связанный с поверхностью широкополосным оптико-волоконным кабелем, опускался в глубину на месте крушения «Скерки D». Мы наблюдали видеопоток, проверяли сенсоры и лихорадочно программировали компьютеры. В одном этом погружении сосредоточились семь лет нашей совместной работы: датчики, точная навигационная система, автоматизированное управление направляли «парение» «Ясона» над «Скерки D» и заставляли его двигаться со скоростью улитки по точным повторяющимся трассам, расположенным на расстоянии всего одного метра друг от друга. Сонары и цифровые камеры собирали информацию и передавали ее на судно, где все записывалось на жесткие диски. Акустическая навигационная система, которую я разработал, проверяла положение «Ясона» с точностью до долей сантиметра несколько раз в секунду, давая точную привязку к местоположению для всех данных.
Затем инженеры и аспиранты принимались за работу, соединяя отдельные изображения в широкомасштабный фотомонтаж места крушения и преобразовывая данные с сонаров в топографическую карту высокой точности. Эта карта связывала воедино навигацию, компьютеры, сенсоры и обработку информации. Ранее мы уже проделывали такую работу по частям, но никогда — всю вместе и в такой интересной и важной локации.
Поисковые работы, выполненные роботом, расширили имеющуюся информацию и дали количественную оценку тому, что я увидел из иллюминатора NR-1. В то время как мое пребывание на подводной лодке давало примитивный опыт присутствия, робот превращал морское дно в биты информации. Затем, сидя в сравнительно комфортабельном отсеке надводного судна и получая поток данных, мы исследовали виртуальное место кораблекрушения в деталях, открывая множество вещей, которые я не видел, когда находился «там».
Теперь мы могли определить размеры места кораблекрушения: оно составляло 20 м в длину и 5 м в ширину. На нем выделялись две четко очерченные кучи древних сосудов, которые оказались амфорами. Многие из них лежали в маленьких воронках, которые за тысячи лет, очевидно, были промыты вокруг них слабыми подводными течениями. В основном амфоры достаточно сильно отличались друг от друга, но в одном кратере лежали три совершенно одинаковые, как будто их скрепили вместе. Морское дно, которое казалось плоским, когда я смотрел на него невооруженным глазом сквозь иллюминатор, в действительности имело небольшой изгиб, приподнимаясь всего на несколько сантиметров. Это были очертания корпуса корабля «Скерки D», погребенного под слоем ила.
Когда мы показали цифровые карты одному из находившихся на борту археологов, он воскликнул: «Вы за четыре часа сделали то, чем я на месте последних раскопок занимался целых семь лет!» К тому же никогда раньше ни один подводный археолог не располагал столь подробной и точной картой, как наша карта «Скерки D» — фактически это была самая точная карта из когда-либо выполненных карт морского дна, пусть даже она отражала только крошечный участок в огромном океане.
Поисковые работы «Скерки D» были кульминацией по меньшей мере восьми лет инженерной работы. Мы научились оцифровывать морское дно с высокой точностью. Это должно было привести к изменениям и в археологии, и в способе изучения человеческой истории в глубинах моря. Теперь мы знали, как выполнять археологические «раскопки», даже не прикасаясь к ним. Мы открыли новую отрасль археологии, направленную на изучение морских глубин и древних торговых путей, связывавших разные народы. Мы могли поднимать новые вопросы. Но не всем понравилось это нововведение.
Исследования, проводимые с помощью роботов, некоторым показались потрясающими, а других встревожили. Пытаясь понять, чем вызвано это сопротивление, я начал свой путь поисков и открытий, занявший 20 лет. Тем не менее, прежде чем продолжить этот рассказ, нам нужно вернуться к моменту возникновения идеи глубоководных исследований, чтобы увидеть, как люди начали осваивать дно океана, и понять, какую роль «Ясон» сыграл в этой истории.
Сегодня использование роботов для исследования океана стало обычным делом. Когда исчезает самолет или прорывается нефть из подводной скважины, роботы — самый первый (а иногда и единственный) способ увидеть, что произошло. Но все время, пока разрабатывался «Ясон», не стихали жаркие дебаты. «Эти роботы навсегда останутся всего лишь игрушками для инженеров», — предостерегали нас некоторые ученые. Другие вообще заявляли, что для того, чтобы стать настоящим океанографом, нужно физически спуститься на океанское дно. Известные археологи заявляли, что посещать с помощью дистанционно управляемых роботов останки древних кораблей в глубинах океана по определению неэтично, даже если это делается только с целью сделать фотографии.
Эти археологи разработали свои методы исследования для мелководья. С аквалангами они могли изучить верхние несколько десятков метров океана, что заставляло их держаться поближе к берегу. Даже глубина погружения большинства подводных лодок, как правило, ограничена несколькими сотнями метров. Можно сказать, что они являются аппаратами, пригодными для погружения в воду, разработанными скорее для того, чтобы путешествовать по океану, а не нырять в его глубины. (Большая часть подводных лодок и роботов были построены для мелководных прибрежных районов, и вы даже можете построить что-то подобное сами из деталей, купленных в магазине технических товаров.)
Напротив, Лаборатория глубоководных погружений специализировалась на очень больших глубинах, часто достигающих нескольких километров, что позволяло нам оказываться посреди океана, в глубоководных впадинах или зонах субдукции (океанских котловинах). Это экзотические среды с экстремальными условиями, высоким давлением и другими факторами, которые предъявляют особые требования к технике и людям.
Говоря инженерным языком, полная глубина океана составляет 6000 м. Участки такой глубины покрывают более 90% океанского дна. Для того чтобы опуститься так глубоко, нужны действительно тяжелые машины: чтобы сохранить даже небольшую электронную начинку сухой на такой глубине, необходимо огромное цилиндрическое металлическое вместилище, которое превосходит масштабы своей начинки по размеру, весу и ценности. Самая глубокая часть океана — Марианская впадина — имеет глубину почти 11 000 м и требует еще более приспособленной к таким условиям техники. Расположенные в открытом океане горные кряжи, которые окружают Землю кольцом, как шов на бейсбольном мяче, поднимаются до глубины от 4000 до 2000 м под поверхностью океана.
Робот «Ясон» соревновался не столько с подлодкой NR-1 военно-морских сил США, сколько с аппаратом космической эры, который был разработан в Вудс-Хоуле в 1960-е годы и был призван переносить глаза, тела и разум ученых непосредственно в глубины океана. Он назывался «Элвин», и более двух десятилетий этот белый глубоководный аппарат попадал в заголовки газет, собирая научные данные и потрясая воображение публики. В этой истории роботы и управляемые людьми системы развивались вместе.
Связывал их Боб Баллард.
Доктор Роберт Баллард не изобрел ни одной технологии, связанной с глубоководными погружениями, и никогда не заявлял, что сделал это. Он получил научное, а не инженерное образование и принадлежит к той редкой породе ученых, которые спокойно работают с инженерами и размышляют о том, чтобы заниматься наукой с помощью гипотетических, еще не созданных инструментов будущего, а не с помощью уже существующих. Бо́льшая часть отдельных деталей его роботизированных систем применялась в других местах. Но у Балларда был непосредственный опыт работы на больших глубинах, он развил концепцию дистанционно управляемых роботов для этой среды, создал лабораторию и собрал команду, чтобы воплотить концепцию в жизнь, и нацелил эту команду на ключевые проекты, которые позволяли испытать в деле технические системы. Только теперь, вспоминая его наставничество, я осознаю, в какой мере его понимание дистанционного присутствия определило мое собственное представление об этом.
Баллард, служивший военно-морским офицером, прибыл в Вудс-Хоул из Калифорнии в 1966 году, во время вьетнамской войны. Его отец был инженером, который работал с инерциальными системами управления. Роберт начал работать в North American Aviation, изучал первые батискафы и другие глубоководные аппараты, хотя больше интересовался наукой, а не техническими деталями. Он начал писать работу на получение степени в области океанографии, но был призван во флот. Балларда назначили посредником между Управлением военно-морских исследований и Институтом океанографических исследований Вудс-Хоул. Хотя Вудс-Хоул финансировался частным образом как университет, в те времена он получал большие деньги от военно-морских сил.
Военно-морские силы мало интересовались большими глубинами, которые, по их мнению, не могли сыграть никакой роли в холодной войне (боевые подводные лодки погружаются на глубину менее 600 м). Все изменилось в 1963 году, когда атомная субмарина «Трешер» затонула на глубине 2400 м вместе с экипажем из 129 офицеров и членов команды. Тогда в военно-морских силах поняли, что нет никакого способа найти подлодку и достать со дна океана очень дорогие, секретные и опасные предметы, которые покоились на большой глубине. Тогда Управление военно-морских исследований стало выделять институту Вудс-Хоул средства на постройку глубоководного аппарата (в отличие от подводной лодки такой аппарат не может двигаться через океан своим ходом; его перевозят на палубе плавучей базы, погружается он почти вертикально). Основная его часть была изготовлена в виде идеальной сферы из особой стали марки HY-100 (позже — из титана), имела диаметр около 2 м и была снабжена множеством систем и батарей. Аппарат назвали «Элвин».
В 1966 году, когда бомбардировщик военно-воздушных сил США В-52 потерпел крушение и уронил в океан неподалеку от берегов Испании водородную бомбу, «Элвин» продемонстрировал свои возможности, обнаружив и подняв ее с глубины почти 900 м. Правда, не достигнув поверхности, он снова уронил бомбу обратно на дно, причем в еще более глубокое и оставшееся неизвестным место. Военно-морские силы воспользовались управляемым по кабелю подводным экспериментальным аппаратом, чтобы закончить работу. Ни одно из устройств не работало идеально, но это происшествие подчеркнуло необходимость развития технологий, обеспечивающих доступ к большим глубинам. Как и в районе банки Скерки, системы, управляемые человеком и действовавшие дистанционно, работали бок о бок.
«Элвин» был одним из проектов эпохи «Аполлонов», которые обеспечили присутствие людей на дне моря во многом так же, как американцы обеспечивали это присутствие в космосе. Но в то время, как программа «Аполлон» получала миллиарды долларов для того, чтобы послать людей на Луну, проект «Элвин» был вынужден обходиться несколькими миллионами, чтобы отправить людей в такой же неизведанный мир.
Балларда как главного посредника между военно-морскими силами и институтом Вудс-Хоул начали привлекать к интеллектуальной работе. Во время упадка, охватившего армию после вьетнамской войны, он уволился из военно-морских сил и присоединился к группе «Элвин» в Вудс-Хоуле, получив задание искать новых заказчиков для глубоководного аппарата. По его собственным словам, превратился в «научно-исследовательского коммивояжера». Также Баллард поступил в университет Род-Айленда с целью получить степень доктора философии в морской геологии. Защитив диссертацию, он стал научным сотрудником института Вудс-Хоул.
В конце 1960-х и начале 1970-х годов «Элвин» начал сопровождать научные экспедиции, постепенно оказываясь все дальше от дома, становясь все более надежным, безотказным и маневренным. Теперь он был лучше приспособлен для того, чтобы переносить нужное научное оборудование, средства для отбора образцов и приспособления для манипулирования. Глубина погружения также увеличилась до 4000 м.
История создания «Элвина» шла параллельно с развитием тектоники плит — формальной научной теории, которая зародилась в 1960-е годы из идей о горизонтальном перемещении континентов, развивавшихся в XX веке. Молодая отрасль морской геологии находилась на переднем крае науки, собирая магнитометрические, батиметрические и сейсмические данные, подтверждающие идею о том, что именно на морском дне формируется земная кора. Она постоянно создается вдоль срединно-океанических хребтов, в то время как плиты расходятся в стороны в местах океанских впадин, где кора проваливается внутрь земного шара.
Но природные условия дали ученым очень мало прямых доказательств в поддержку идеи спрединга (растяжения) океанского дна. Традиционные методы океанографии, в том числе использование инструментов, подвешенных к судну, или драгирование — прочесывание драгой морского дна имели недостаточную точность, для того чтобы охарактеризовать срединно-океанические хребты и отобрать с них образцы.
Ряд погружений, совместно проведенных американцами и французами в 1973–1974 годы, получивших название проект FAMOUS, привели «Элвин» и два французских аппарата на срединно-океанический хребет с целью составить карты и собрать образцы. Этот проект обеспечил бесспорное подтверждение теории тектоники плит. Так началась богатая на открытия эпоха.
Более того, проект FAMOUS позволил «Элвину» в первый раз удалиться от побережья и погрузиться на глубину, где аппарат доказал свою ценность в качестве научного инструмента. «Нам очень повезло, что "Элвин" был там, — вспоминал Баллард, — в то время, когда настал звездный час теории тектоники плит». Тем не менее даже после проекта FAMOUS Баллард ощущал, что бо́льшая часть научного сообщества по-прежнему воспринимает «Элвин» как «диковинный механизм».
Для того чтобы доказать научную ценность «Элвина», потребовалось использовать его в сочетании с другой технологией — сетью акустических транспондеров, которые команда размещала вокруг исследуемой области и которые помогали передвигать глубоководный аппарат точно по координатам, обозначенным как х и у. Транспондеры, вскоре разработанные в институте Вудс-Хоул по контракту с Управлением по перспективным научным исследованиям США, питались от аккумуляторной батареи. Сеть транспондеров развертывалась с судна в начале серии погружений. Каждый из них принимал сигнал гидролокатора, затем возвращал этот сигнал с другой частотой после фиксированной задержки во времени. «Запрашивая» эти транспондеры и слушая их ответы, «Элвин», плавучая база (или любой другой аппарат) могли определить свое положение в пределах исследуемой области. Навигационная информация обеспечивала «Элвина» количественными ориентирами, что давало возможность точно определить место на хребте, откуда были взяты образцы или где были проведены наблюдения.
Баллард разработал методы, благодаря которым собранные «Элвином» данные могли опираться на научные гипотезы. Он считал, что этот аппарат позволяет ученым в точности воспроизводить принципы работы полевой геологии глубоко в океане. «Ключевыми факторами в процессе исследования являются тренированный ум ученого, его глаза и молоток в его руке, — писал Баллард. — А проворный маленький белый глубоководный аппарат обеспечил морским геологам Вудс-Хоула существенный для наблюдений элемент присутствия на дне океана».
Даже после получения дополнительных данных в рамках проекта FAMOUS тепловыделение в системе срединно-океанических хребтов не находило объяснения, и ученые начали допускать, что огромное количество тепла извергается из поверхности океанского дна в других местах. В качестве вероятного механизма предлагался такой: придонная морская вода вдавливалась в кору под тяжестью лежащих выше масс воды, нагревалась там, а затем выплескивалась обратно. В 1977 году в ходе экспедиции на Галапагосских островах Баллард и команда ученых подтвердили наличие неподалеку от островов именно таких гидротермальных источников.
Ученые обнаружили не только источники, но и необычную экосистему вокруг них, где в глубинах, которые ранее считались биологически неактивными, изобиловала жизнь. Проблема состояла только в том, что экспедиция была организована для исследования геологии океанского дна и, несмотря на потрясающее открытие, на борту не было ни одного биолога.
Баллард организовал по дальней связи импровизированную однополосно-модулированную радиоконференцию с биологами института Вудс-Хоул Хольгером Яннашем и Фредом Грасслом. «Мы спрашивали Хольгера и Фреда, что делать дальше, — вспоминал Баллард, — пытаясь вместить четыре года постдипломного изучения биологии в один скрипучий радиотелефонный разговор». Но даже такой несовершенный способ связи помог применить знания экспертов к находкам на дне океана.
Проект FAMOUS и Галапагосские экспедиции помимо «Элвина» использовали еще один, менее «раскрученный» прибор, который подготовил почву для роботов будущего. Перед погружением «Элвина» позади судна на длинном тросе буксировали салазки для телекамеры с прикрепленным к ним автоматическим аппаратом ANGUS (Acoustically navigated geophysical underwater system ANGUS — геофизическая подводная установка с акустическим управлением).
ANGUS представлял собой всего лишь усиленную стальную раму размером примерно с автомобиль, снабженную фотокамерами для цветной пленки шириной 35 мм и набором стробоскопических вспышек, которые срабатывали примерно каждые 10 секунд. Когда аппарат был под водой, находящаяся на поверхности команда получала весьма ограниченную обратную связь (от акустического альтиметра) и располагала лишь информацией о высоте салазок над уровнем дна. Инженеры травили и выбирали трос таким образом, чтобы держать ANGUS на высоте приблизительно 4 м над поверхностью дна, что было идеально для фотографирования.
Поверхность срединно-океанического хребта может быть достаточно опасной. Часто она поднимается быстрее, чем люди успевают среагировать. Тяжелая рама ANGUS была разработана так, чтобы он мог ударяться о препятствия с минимальным ущербом для камер. После нескольких часов поисков и ударов ANGUS поднимали на борт и проявляли его цветные фотопленки. Лозунгом команды ANGUS была фраза «Хоть и протекает, но тикать продолжает», обыгрывающая знаменитый в те дни рекламный слоган часов «Таймекс» и уподобляющая салазки часовому механизму. Они ласково называли аппарат «дурачком на веревочке» из-за отсутствия даже самых простых способов управления.
Тем не менее, чтобы протащить тяжелые салазки на тросе длиной 2,4 км, требовалась немалая сноровка. Трос диаметром в большой палец руки казался очень тонким, когда его опускали в огромный океан, но если учесть его длину в несколько километров, то суммарная площадь, которую предстояло протащить сквозь воду, могла сравниться с площадью боковой стены здания. Если тянуть слишком быстро, аппарат будет парить, как воздушный змей, пройдет слишком высоко над поверхностью дна и не сможет получить полезную информацию. Только крайне медленная скорость и большой балласт могли уменьшить эффект парения. Более того, из-за этой силы сопротивления судну требовалось много времени — иногда целые часы, — чтобы приблизиться к аппарату по завершении работы.
Команда пыталась тащить аппарат вдоль хребта по прямым поисковым трассам, расположенным на равном расстоянии друг от друга (это часто называют «подстригать лужайку», как говорили и мы на борту NR-1 годы спустя). Но пройти по прямой поисковой трассе, когда требуется два часа на коррекцию, чтобы достичь дна, было невыполнимой задачей. На то, чтобы развернуть судно с аппаратом в конце трассы, мог уйти целый день. Как правило, большие суда просто не могут двигаться достаточно медленно даже по прямой. Но исследовательское судно института Вудс-Хоул под названием «Кнорр» имело два уникальных крыльчатых движителя, которые позволяли ему зависать над одной точкой океана или двигаться чрезвычайно медленно в любом направлении (позже эти движители были заменены системой динамической стабилизации судна, распространенной в нефтяной отрасли для выполнения той же функции).
Вначале и лебедка, и судно контролировались с мостика «Кнорр», как было принято на морских судах. Команда ANGUS, работая со своего пункта управления на нижней палубе, передавала по телефону «на один вверх» или «на один вниз». Эти микрокоманды, естественно, надоели команде, поэтому они добавили пульт дистанционного управления лебедкой на пункт управления ANGUS и в итоге еще и компьютерную связь с системой управления судна. Еще до начала эпохи роботов такие технические средства были призваны скорректировать особенности ручного управления техникой.
«Мы обнаружили, что протащить салазки в течение часа — это почти все, что ты можешь сделать, — вспоминал член команды ANGUS Джон Портус, — потом начинаешь чувствовать себя немного отупевшим». Операторы сосредоточивали свое внимание на бумажной ленте, где фиксировалась высота салазок над уровнем дна, и пытались управлять лебедкой так, чтобы удерживать аппарат на нужной высоте, которая на бумаге составляла всего полсантиметра. Также они согласовывали с мостиком указания по поводу того, как именно судно должно медленно ползти вперед.
Эти ранние проекты подготовили почву для более поздних событий и конфликтов в нескольких важнейших аспектах. Система с удаленным управлением ANGUS работала в связке с управляемой людьми системой «Элвин». ANGUS часто запускали ночью, когда «Элвин» заряжал батареи. Благодаря сочетанию акустического управления и точного позиционирования судна весь процесс превращался в единую систему, посредством которой можно было получать выраженные и в качественной, и в количественной форме данные со дна океана.
Радиосвязь в Вудс-Хоуле отражала непредсказуемый характер исследования и экспертного опыта: если вы действительно занимаетесь исследованиями и не знаете, что вам предстоит обнаружить, вы, возможно, не возьмете в экспедицию нужных людей. Но простая радиосвязь может соединить вас с более широким кругом научной общественности.
Наконец, «глупая» сущность ANGUS тоже накладывала ограничения — операторы не могли выяснить, собраны ли нужные или вообще какие-либо данные, пока не проявят пленки после погружения. Иногда собранные за целый день данные оказывались потерянными, потому что камеры ломались в первые пять минут или на них была выставлена неправильная экспозиция.
В более поздних интервью никто из операторов ANGUS не описывал то, что они считали «присутствием» на морском дне. После второй Галапагосской экспедиции команда ANGUS вспоминала свои эмоции, вызванные не их собственными фотографиями, а просмотром видеозаписи, которую после погружения доставил «Элвин». Приведу слова члена команды Стива Гегга:
Мы потеряли дар речи! Хотя мы уже видели их фотографии [глубоководных существ]... Но когда ты по-настоящему видишь то, что наблюдали люди, сидящие в «Элвине»... это был материал, который они отсняли там. Просто поразительно! Знаете, эта полихеда в трубке с переливающейся водой вокруг и краб, приближающийся к ней... Когда ты наконец мог посмотреть видео и понять, от чего все в таком восторге, все становилось куда понятнее.
Двадцать пять лет спустя у Гегга в памяти остались не рапорты членов команды «Элвина» и не их рассказы о собственном пребывании на дне океана, а вот эта видеозапись — движущиеся изображения происходящего глубоко под водой.
Ограничения ANGUS были связаны не с тем, что он не давал нового опыта, а со временем — обратная связь от цветной пленки, которую еще надо было проявить, оказывалась слишком медленной. Если бы операторы получали изображения достаточно быстро, чтобы успевать вносить коррективы в план следующего погружения, то эффект был бы намного больше.
Баллард заметил похожее явление и внутри «Элвина». За первые два погружения биологи и пилоты «Элвина» не смогли обнаружить гидротермальные источники. Хотя в этой экспедиции Баллард был главой группы ANGUS и официально не работал с «Элвином», научная команда попросила его погрузиться вместе с ними, чтобы помочь найти источники. Оказавшись на дне, Роберт нашел трещину, начал наблюдать за крабами и «следовал по увеличению градиента количества крабов», пока они не прибыли к полю источников.
В возбуждении Баллард оглянулся на Хольгера Яннаша, старшего научного сотрудника института Вудс-Хоул. Он был первым биологом, который своими глазами увидел это открытие, изменившее мир. «Итак, мы прибыли туда, и я никогда этого не забуду, — вспоминал Баллард сцену, произошедшую внутри «Элвина», — а Хольгер сидел спиной к смотровому иллюминатору, прильнув к телеэкрану. И я спросил:
— Хольгер, что ты делаешь?
— Я смотрю.
— Но почему ты не смотришь сюда?
— Так лучше, здесь лучше. Мне лучше видно здесь».
Цветное телевизионное изображение, созданное с помощью камеры фирмы RCA, было настолько хорошим, что, хотя ученый физически присутствовал на дне океана, он предпочитал воспринимать информацию дистанционно, через камеру. «У меня в голове словно лампочка зажглась, — вспоминал Баллард. — Так что же мы тогда делаем тут, внизу?»
После окончания экспедиции, в 1980 году, Баллард взял творческий отпуск и направился в Стэнфордский университет, чтобы привести результаты своей работы в должный вид для публикации и приготовиться к рассмотрению его кандидатуры на постоянную должность в Вудс-Хоуле. Там, окруженный атмосферой конструкторской школы мирового класса, Силиконовой долины, и зарождающейся революции в развитии персональных компьютеров, он обратился к другому способу исследования океанских глубин.
«После того как мы использовали ANGUS, который помогал составить карты критически важных участков срединно-океанического хребта, — писал Баллард, — я понял, что более совершенная и сложная форма дистанционно управляемого непилотируемого аппарата способна в конце концов стать гораздо более важным научным и исследовательским инструментом, чем мог быть "Элвин"». Баллард размышлял о борьбе концепций и постепенном замещении одной концепции другой — будущее управляемых человеком аппаратов было «под вопросом», тогда как дистанционно управляемые аппараты должны были стать «гораздо более важными».
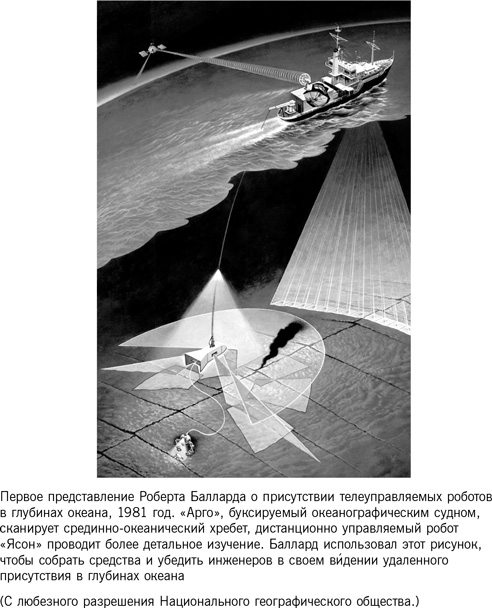
В 1981 году в National Geographic вышла статья «Новый мир океана», в которой друг Балларда Сэмюэл Мэтьюс проводил обзор аппаратов, используемых для изучения океана. На иллюстрации размером с целую страницу были изображены различные аппараты, предназначенные для погружения человека, — в основном подводные лодки и батискафы: NR-1, батискаф «Триест», даже оригинальная батисфера Уильяма Биба и «Элвин». Дистанционно управляемые аппараты включали в себя «Дип Тоу» Института океанографии Скриппса (который сделал вклад в Галапагосские экспедиции) и новый, свободно плавающий французский аппарат «Эполар».
На иллюстрации также нашлось место новой идее Балларда — системе, состоящей из двух частей, сочетающей салазки, напоминающие ANGUS, и роботизированный аппарат, который мог передвигаться самостоятельно. Баллард назвал эту систему «Арго»/«Ясон» в честь мифического исследователя и его судна. «Арго»/«Ясону» был посвящен отдельный рисунок, где они изображались как «роботы, которые вместо человека будут нести в глубины его глаза и уши, а также остальные органы чувств». Цитируя неназванный источник (по всей видимости, Балларда), автор статьи говорил о том, что «они будут более эффективны... чем такое транспортное средство, сравнимое с «Фордом» модели Т, как «Элвин»… [позволяя] ученым перенести свои глаза — свой разум — в бездну в полной безопасности и практически без всяких ограничений во времени погружения».
На красивой иллюстрации эта система была представлена следующим образом: судно, сканирующее батиметрическим сонаром пространство впереди салазок «Арго», спутниковая линия связи с берегом (заменяющая скрипучую однополосно-модулированную радиосвязь), «Арго», сканирующий океан собственными сонарами и видеокамерами, и выдвигающийся из своего «гаража» сферический робот «Ясон» с двумя антропоморфными «руками», собирающий биологические образцы со срединно-океанического хребта.
Вернувшись в Вудс-Хоул (и получив там постоянное место), Баллард, используя свои навыки «научного коммивояжера», начал убеждать Научно-исследовательское управление военно-морских сил принять его идею. Управление в течение долгого времени поддерживало основные научные исследования океана (именно в этом заключалась первая работа Балларда в Вудс-Хоуле), но прежде всего их интересовала возможность проникать в потерпевшие крушение суда, чтобы увидеть (или извлечь) то, что может оказаться внутри.
Две атомные подводные лодки — «Трешер» и «Скорпион» — затонули в 1963 и 1968 годах соответственно, и военно-морские силы хотели выяснить, имела ли место утечка радиации. Также они намеревались составить полную карту мест кораблекрушений, а это было бы трудно сделать с помощью аппарата типа «Элвина». Также, хотя об этом и не заявляли прямо, военно-морские силы явно были не прочь изучить места кораблекрушений военных кораблей других держав.
Вскоре Баллард добился успеха, получив от Научно-исследовательского управления финансирование в размере 600 000 долларов в год в обмен на обещание позволить военно-морским силам эксплуатировать систему, которую он построит, на протяжении одного месяца в году (бо́льшая часть этих денег была тайно передана военно-морской разведкой, использовавшей Научно-исследовательское управление как подходящее прикрытие). В 1982 году Баллард вышел из группы «Элвин» и открыл собственное отделение — Лабораторию глубоких погружений. Теперь разница между погружениями на океанское дно людей и дистанционным присутствием определялась не только использованием разных технических средств. Ими также занимались две разные группы людей. И они не всегда ладили.
Баллард начал собирать оборудование и людей для полноценной работы своей лаборатории. Его напарником в лаборатории был Скип Маркет, инженер из Вудс-Хоула, который долго работал в группе «Элвин» и сконструировал ключевую для этого аппарата акустическую навигационную систему. Теперь, когда «Элвин» считался доведенным до совершенства, Маркет искал новую работу. Баллард и Маркет привлекли ветеранов группы ANGUS Тома Крука, Эрла Янга, Стива Гегга и Кэти Оффингер, которая на долгие годы стала главной помощницей Балларда. Также они взяли Стю Харриса, инженера-электротехника из компании Lockheed, у которого был опыт управления большими проектами, связанными с цифровыми съемками на спутниках.
Команда установила следующий порядок работ: во-первых, сконструировать «Арго» с коаксикальным кабелем, во-вторых, улучшить систему с помощью волоконно-оптического кабеля. Далее построить уменьшенный вариант «Ясона», чтобы исследовать места кораблекрушений, и только потом перейти к полномасштабной версии, которая должна была составить единое целое с «Арго».
Когда Баллард договаривался с Научно-исследовательским управлением о поддержке своего проекта, там ему предложили работать совместно с Массачусетским технологическим институтом, где управление уже финансировало исследования по телеробототехнике. Том Шеридан был профессором Массачусетского технологического института и имел необычный послужной список. Он был учеником психолога-бихевиориста Б. Скиннера и одновременно инженером-машиностроителем, а также уже долгое время интересовался взаимодействием человека с машинами. (Подход Скиннера к поведению как к черному ящику всегда выглядел привлекательным для инженеров.) В расследовании аварии на атомной станции «Три-Майл-Айленд» в 1979 году пригодились навыки Шеридана. Кроме того, это расследование помогло сформировать зарождающуюся сферу изучения человеческих факторов в технике.
Шеридан (позднее ставший одним из моих научных руководителей в Массачусетском технологическом институте) изучал взаимодействие между людьми и машинами в реальных системах и понимал, что только очень немногие системы имеют полностью ручное управление, где человек всем управляет самостоятельно, или являются полностью автоматическими, где все делает компьютер. Скорее, большинство систем находится где-то посередине, в разных частях «спектра автоматизации», и зачастую перемещаются внутри этой области в реальном времени. Он называл это перемещение «супервизорным управлением», где человек и машина работают сообща, передавая контроль и меняя «уровни автоматизации» в зависимости от ситуации в конкретный момент. Более того, Шеридан принимал во внимание тот факт, что работа систем с супервизорным управлением очень зависит от социального контекста, в котором они применяются.
Баллард приехал к Шеридану в Массачусетский технологический институт и встретил там молодого инженера по имени Дана Йоргер. Йоргер вырос в семье рабочих судостроительного завода, поэтому, поступив в Массачусетский институт, чтобы изучать машиностроение, сохранил интерес к океану. Йоргера привлекал в Шеридане широкий кругозор последнего: «Он очень интересовался социальными аспектами, которые не касались его работы… социальной стороной техники. На самом деле он считал, что без этого невозможно понять технику». Йоргер получил докторскую степень, трудился после защиты диссертации в лаборатории Шеридана и присматривал себе новую работу.
И тут появился Боб Баллард. Как вспоминал Йоргер, «Боб произнес свою коронную речь» об «Арго» и «Ясоне». Он показал Шеридану и Йоргеру рисунки «Арго» и «Ясона» из National Geographic. Йоргер запомнил момент своего обращения в новую веру, потому что как раз в это время посмотрел на часы: «Встреча началась в десять. [Теперь] было двадцать минут одиннадцатого, и я подумал, что это именно то, чем я хочу заниматься».
Йоргер подписал контракт с новой лабораторией, которой Баллард дал название DSEL (Deep Submergence Engineering Lab) — Лаборатория глубоководного конструирования. Когда техник Эрл Янг начал называть ее «дизелем», Баллард изменил название, потому что в военно-морских силах дизелем называют старую подводную лодку доатомной эпохи. Лаборатория стала называться просто DSL (Deep Submergence Lab) — Лаборатория глубоководных погружений.
Баллард хотел, чтобы в штате новой лаборатории были не только свежеиспеченные доктора наук. Неподалеку от института Вудс-Хоул находилась маленькая компания под названием Benthos, основателем которой был Сэм Раймонд, ученик Гарольда «Дока» Эджертона в Массачусетском технологическом институте. Эджертон прославился своими стробоскопическими источниками импульсного освещения, с помощью которых он сделал потрясающие фотографии пуль, пробивающих насквозь яблоки. Он также разрабатывал камеры и вспышки для подводной съемки в океане, которые поставлялись на рынок компанией Benthos.
Также компания проводила эксперименты с простыми мелководными неавтономными роботами, связанными с судном тросом, но не добилась особого коммерческого успеха. Один из прототипов такого дистанционно управляемого аппарата был безвозмездно передан институту Вудс-Хоул.
Вскоре после этого Вудс-Хоул был привлечен пожарным департаментом Куинси (штат Массачусетс) к поискам пропавшего подростка. Опасались, что он утонул в заброшенном каменном карьере, наполненном водой. Баллард увидел в этом возможность испытать своего нового робота и послал в Куинси двух техников: Тома Крука и Эрла Янга. Оба имели за плечами многолетний опыт выходов в море и работы в тяжелых глубоководных условиях, но робот для них был в новинку, поэтому они взяли с собой молодого пилота из Benthos Мартина Боуэна.
Мартин Боуэн более чем кто-либо подходил на роль пилота дистанционно управляемого робота в глубинах океана. За пять лет до того, как подвести удаленно управляемого робота к парадной лестнице «Титаника», Боуэн работал техником и имел опыт в дайвинге, биологии и фотографии. В Benthos он производил сборку выпускаемых компанией аппаратов, но новый робот привел его в восхищение.
У Benthos была испытательная камера размером с большой закрытый бассейн, и Боуэн проводил там целые вечера, обучаясь точно управлять роботом. Он затемнял окна в помещении, устанавливал временные препятствия, сделанные из алюминиевых труб, и тренировался проплывать между этими обманными подводными структурами, используя только изображения, получаемые с передней видеокамеры аппарата. Этот опыт оказался беспрецедентным, поскольку поле зрения камеры было очень узким.
Боуэн проводил параллели между этими тренировками и своим опытом профессионального аквалангиста: «Я должен был постоянно помнить о том, что что-то может вот-вот вцепиться в мои ласты. Что-то всегда маячило позади меня, и это очень легко переносится в трехмерный мир подводных роботов; теперь что-то угрожало вцепиться в мой трос». Для такого необычного движения на тросе Боуэн развил «осознание того, как ты отваживаешься выйти наружу, как ты осматриваешься, делаешь записи и затем возвращаешься». В эти тихие одинокие вечера в испытательной камере компании Benthos «я играл в эту игру Гензеля и Гретель, где проводил аппарат через препятствия, а потом старался отработать обратный путь так, чтобы не запутаться в кабеле». Как фотограф Боуэн тоже развивал ощущение трехмерного движения под водой.
Боуэн, Крук и Янг приехали в карьер и начали поиски. Задача была жутковатой: в основном на дне карьера глубиной 120 м лежали старые автомобили и тележки из супермаркетов. Но перспектива печальной находки удручала. «Каждый раз, когда я поворачивал видеокамеру аппарата, — вспоминал Боуэн, — я думал, что сейчас увижу пару кроссовок, шорты и юное лицо». Они так и не нашли тело. Годы спустя того подростка обнаружили в Техасе, живым и здоровым. Его исчезновение было сфабриковано.
Но команда ученых из Вудс-Хоула получила ценный опыт. Они не только занимались поиском, но и составили карту, обозначая свой путь по карьеру с помощью веревок, чтобы оценивать положение и быть уверенными, что обыскали всю территорию. На Балларда это произвело впечатление, и он предложил Боуэну работу. Пилот был возбужден открывающимися перед ним перспективами. «Это были люди действия, — говорил он о Круке и Янге, — не те, что просиживают перед компьютерами. Это были люди, которые выходили в море. Они добивались результатов». Как это ни парадоксально, они стали людьми, которые ходили в море и сидели перед компьютерами.
Когда в лаборатории Балларда появился Боуэн, там уже кипела деятельность. «Арго» был в процессе постройки. Как и ANGUS, он представлял собой буксируемые салазки; Баллард называл его «невероятным воздушным змеем из белых стальных трубок размером с вагон поезда с одним щегольским хвостовым килем». В отличие от своего предшественника, «Арго» посылал прямо по кабелю телеметрические данные и видео в реальном времени, хотя, как и ANGUS, делал фотографии с помощью пленочных камер. Волоконно-оптические кабели, достаточно прочные для применения в океанографии, стали доступны только через несколько лет, поэтому на «Арго» использовался обычный коаксиальный кабель, похожий на те, которые вы втыкаете в телевизор. Электричество, данные и видео мультиплексировать в одном и том же электрическом проводнике — дело тонкое. Несмотря на идеальную настройку и защиту, сигналы могли смешиваться друг с другом, вызывая помехи в данных и «снег» в видеосигнале.
Дана Йоргер, единственный инженер с ученой степенью в группе, работал над пониманием динамики длинных тросов, использующихся для буксировки, и над улучшением автоматического, «динамического позиционирования» судна на поверхности. Он также начал создавать исследовательскую программу по использованию автоматизации для улучшения аппаратов, опускающихся на дно океана. Если судно может удерживать свое положение в заданной точке с помощью обратной связи, то почему на это не способен робот? Какие новые технологии потребуются, чтобы выполнить эту задачу? Как такая система под супервизорным управлением поможет пилотам и ученым?
К лету 1984 года «Арго» был полностью готов и совершил тщательный осмотр места крушения подводной лодки «Трешер» на глубине около 1800 м. Видео, переданное с аппарата в режиме реального времени, оказалось бесценным для определения расположения обломков и навигации среди них.
Еще более важно то, что видео наконец дало команде ощущение присутствия, которого Баллард и хотел добиться. «Конечно, все те, кто находился в пункте управления, чувствовали, что спустились в глубины вместе с "Арго", — писал в своих воспоминаниях Баллард. — Наши жадные до информации глаза и беспокойный любопытный разум переместились на дно океана. А уязвимые человеческие тела находились над морскими глубинами в комфортабельном пункте управления с кондиционированным воздухом… Экраны были похожи скорее на иллюминаторы, чем на телевизионные мониторы». Информация с сонара и других сенсоров только обогатила впечатления команды.
Работы по поиску «Трешера» придали Балларду и Лаборатории глубоководных погружений авторитет в глазах спонсоров из военно-морских сил. Следующим летом Научно-исследовательское управление одобрило трехнедельную экспедицию «Арго» с целью поисков на месте крушения подводной лодки «Скорпион», понимая, что, если поиски завершатся раньше, команда сможет использовать оставшееся время для работы над другими океанографическими проектами. Поиски «Скорпиона» также увенчались успехом.
Далее «Кнорр» и «Арго» снова в сотрудничестве с французской экспедицией отправились на север для осуществления этих самых «других проектов». Баллард намеревался осуществить давнюю мечту — отыскать «Титаник».
К 31 августа 1985 года, после недели тщательных поисков на высоте около 10 м над уровнем дна Cеверной Атлантики, на экране в пункте управления появилось переданное с «Арго» дрожащее черно-белое изображение, на котором видны были контуры изломанной груды металла, а затем показалась и узнаваемая форма парового котла. Долго покоившиеся в безвестии обломки судна были найдены.
В те волнующие дни, которые последовали за этим открытием, «Арго» полностью задокументировал обломки «Титаника» с помощью видеозаписей, фотографий и измерений. ANGUS тоже принимал участие, отщелкав тысячи изображений на цветной 35-миллиметровой пленке. Получившаяся в результате мозаика, собранная вручную с помощью ножниц и клея наставником Балларда геологом Алом Ачаппи, была опубликована в National Geographic.
Обнаружение места крушения «Титаника» стало величайшей подводной находкой XX века, что вознесло Балларда, подводные аппараты и институт Вудс-Хоул на новые высоты славы. Это событие потрясло воображение публики. С древних времен океанские глубины были темны и неизведанны; дистанционно управляемые аппараты сделали их видимыми и доступными для людей.
Тысячи людей заполонили доки и крошечный городок Вудс-Хоул, когда «Кнорр» вернулся из этой экспедиции. После того как Баллард и его команда сошли с корабля, институт организовал пресс-конференцию в зале по соседству. Там собрались репортеры со всего мира.
Здесь, воспользовавшись моментом своего величайшего триумфа, который изменил его жизнь и работу, Баллард объяснил прессе свое видение удаленного присутствия. Он утверждал, что «Арго» и его «двоюродные братья», находящиеся в разработке в институте Вудс-Хоул, представляют собой «полную революцию» в подводных исследованиях. «Это начало телеприсутствия, возможность отправить на дно свой дух, глаза, разум, а тело оставить наверху… Мы вступаем в новую эру подводных исследований».
Тем не менее тот факт, что «Титаник» был найден с помощью удаленного присутствия, а не людьми, физически находившимися на дне, надолго стал источником напряженных отношений в Институте океанографических исследований Вудс-Хоул.
Это напряжение стало в буквальном смысле поводом для битвы на дне моря, когда в следующем году Вудс-Хоул вернулся к «Титанику», на этот раз — с целью проникнуть в него и исследовать обломки изнутри. Лаборатория глубоководного погружения получила от военно-морских сил маленький аппарат со странным названием AMUVS (улучшенная маневренная подводная система). Это был круглый робот, разработанный таким образом, чтобы помещаться в торпедный отсек подводной лодки и выстреливаться наружу для выполнения разных причудливых заданий.
AMUVS называли «блуждающим подводным глазом». В самом деле, эта фраза отражает основное использование движущегося дистанционно управляемого устройства — нести подводную видеокамеру, меняя положение по воле человека-оператора. Камера ранее была установлена на внешней части батискафа «Триест», но это сооружение оказалось неудачным и не очень хорошо функционировало. AMUVS предвосхитил появление коммерческого продукта — аппарата RCV-225, ранней версии движущегося дистанционно управляемого устройства.
Конструкция AMUVS была заурядной, но у нее имелась одна необычная черта. Оболочкой аппарата служил красивый, странной формы прочный корпус, сделанный из цельного куска механически обработанного титана. Размером примерно с настольный компьютер, он вмещал всю электронику, прикрытую полусферой из кристаллического кварца для защиты объектива камеры. Этот корпус стал сердцем нового аппарата.
Инженеры Лаборатории глубоководных погружений Балларда распотрошили внутренности AMUVS, поставили новую видеокамеру, которая могла двигаться и наклоняться с помощью современных авиационных сервомеханизмов, облачили все это в специальный пеноматериал для поддержания плавучести и оснастили водометы новейшими электрическими двигателями. Этот аппарат стали называть «Ясон Джуниор» (что означает «младший» — Баллард все еще строил планы по созданию полноразмерного «Ясона»). Его целью было продемонстрировать, как дистанционно управляемый аппарат может проникнуть в корпус затонувшего судна и отыскать внутри что-нибудь интересное.
Слова Балларда о том, что благодаря дистанционно управляемым аппаратам машины под управлением людей выйдут из употребления, не прошли незамеченными членами группы «Элвин». С одной стороны, Баллард просто выступал в своей роли коммивояжера: рассказывал о достижениях, которые удивляли как его военно-морских спонсоров, так и публику. С другой стороны, он играл в любимые профессурой внутрикорпортивные бюрократические игры — одна лаборатория против другой.
В интервью Cape Cod Times — местной газете Вудс-Хоула — Баллард предсказывал: «Управляемые человеком подводные аппараты обречены». Позже Баллард утверждал, что говорил об этом «с сожалением», но по-прежнему чувствовалось, что, после того как «Арго» обнаружил обломки «Титаника», «группа "Элвина" утратила часть своей популярности в глазах общественности».
Вскоре у него появился шанс взять свои слова обратно.
Лаборатория Балларда получила от военно-морских сил финансирование на то, чтобы отправить «Ясона Джуниора» внутрь затонувших обломков подводной лодки «Скорпион», чтобы найти ее атомное вооружение. В 1986 году в качестве прикрытия для этого секретного проекта Баллард привлек «Элвина» к участию в детальном изучении обломков «Титаника», включающем использование нового робота «Ясон Джуниор». «Элвин» должен был перевезти «Ясона Джуниора», который имел размеры большого чемодана, вниз, к обломкам, в «гараже», пристроенном на переднем конце «Элвина». Оттуда малый аппарат должен был проникнуть внутрь судна. Волоконно-оптический кабель соединял робота с удаленным оператором, который сидел внутри «Элвина», а также управлял камерой и записью видео. После того как обломки корабля были обнаружены с помощью дистанционно управляемого аппарата, группа «Элвина» была рада, что их привлекли к участию в серьезной экспедиции.
Со времени своего появления «Элвин» приобретал все большее значение. В 1973 году официальная ревизионная комиссия установила процедуры по оценке предложений независимых экспертов и распределению времени на подводном судне, обеспечив соответствующий правилам академический процесс. В 1984 году импровизированную базовую платформу «Лулу» заменило полноценное океанографическое судно «Атлантис II», которое стало плавучей базой «Элвина». К 1986 году «Элвин» совершил более 1700 погружений и зарекомендовал себя как надежный научный инструмент. Только в 1986 году он находился под водой более ста дней, выполняя самые разнообразные научные задачи. Его прочная сферическая капсула теперь была изготовлена из титана, и погружаться он мог на глубину 4000 м.
Также в 1986 году прошла модернизация всего электронного оборудования, в результате чего гидравлические моторы были заменены бесщеточными электромоторами, служащими для движения вперед и управления. Пилоты наконец получили подходящую рукоять управления, больше им не надо было щелкать отдельными тумблерами для запуска и остановки каждого отдельного мотора. «После этих изменений "Элвин" стал совершенно другой машиной», — вспоминал пилот Уилл Селларс. Его первый опыт с новым оборудованием должен был пройти на месте крушения «Титаника».
«Ясон Джуниор», напротив, выступал в роли выскочки-претендента. Он был недавно сконструирован и с грехом пополам протестирован. Он никогда не погружался в глубины и был присоединен к «Элвину» всего за три дня до того, как судно покинуло Вудс-Хоул. Как заметил Мартин Боуэн, «мы сразу же перешли от [тестирования на глубине] трех метров к четырем километрам».
По мнению Балларда, группа «Элвина» считала, что он вернулся с поджатым хвостом, после того как он публично похоронил пилотируемые глубоководные аппараты. Очевидно, что некоторые в группе ощущали то же самое: по пути к месту погружения кок на «Атлантисе» приготовил для Балларда торт, украшенный его словами: «Управляемые человеком подводные аппараты обречены». В непринужденной обстановке, с трудом маскирующей возникшее напряжение, они буквально заставили Балларда съесть свои слова.
Несмотря на смирение, серия погружений никоим образом не сгладила противоречий между сторонниками управляемых и дистанционных систем: в сущности, они вышли на передний план.
С точки зрения Балларда, пилоты «Элвина» скептически относились к дистанционно управляемому аппарату. Во время погружений он замечал, что пилот Ральф Холлис сознательно рискует аппаратом только для того, чтобы продемонстрировать, что он не хуже «Ясона Джуниора» может исследовать обломки и доставлять данные. Но Баллард находил действия «Элвина» слишком консервативными. Каждый день в три часа глубоководный аппарат должен был подниматься на поверхность, чтобы экипаж мог оказаться на борту судна к обеденному времени. Это расписание диктовалось соображениями безопасности, необходимостью отдыха для команды и занимавшим всю ночь продолжительным техническим обслуживанием, но Баллард считал это «бюрократической негибкостью, которая, несомненно, осложнялась хорошей порцией профессиональной ревности». По мнению Балларда, «"Ясон Джуниор" успешно доказывал превосходство дистанционно управляемого аппарата над обитаемыми».
В своих интервью команда «Элвина» не упоминала об этом сравнении. Надежно защищенные своим недавно подтвержденным статусом, они воспринимали дистанционно управляемый аппарат как раздражающую, второразрядную игрушку.
И они оказались правы. Во время первого погружения, как вспоминал Боуэн, «когда пилот "Элвина" включил [электрическую] шину научных приборов, чтобы запитать аппарат, эта штука ["Ясон Джуниор"] начала поджариваться, и это выглядело как маленький белый шлейф, вылетающий из задней части аппарата». Электрические клеммные коробки закоротило, и они начали дымить. Двигатели отказали. Во время одного погружения, когда «Элвин» возвращался на поверхность, маленький «Ясон Джуниор» выпал из своего «гаража» и болтался за «Элвином», как настоящий «дурачок на веревочке». Водолазам пришлось спасать аппарат, обрезав кабель-трос. За двенадцать погружений «Ясон Джуниор» сумел сделать хорошие видеозаписи лишь в двух или трех случаях.
Первое погружение «Элвина» на глубину 4300 м заняло около двух с половиной часов. Баллард и Боуэн сидели внутри, скрестив ноги, на их коленях лежали коробки с видеокассетами, чтобы записывать визуальные достижения «Ясона Джуниора». Глубоководный аппарат «приземлился» рядом с обломками и затем медленно продвигался вперед, пока на экране сонара не возникла огромная цель. Затем, когда он приблизился на дальность видимости, «в иллюминаторах можно было увидеть восьмиэтажное здание так, словно ты находился на парковке перед ним. Таким образом, затонувшее судно словно вырастало над тобой».
Баллард мечтал провести «Ясона Джуниора» над большой лестницей «Титаника» и записать этот пролет на видео. Подобный маневр требовал точно выверенных движений «Элвина» и робота. Аппарат должен был опуститься на палубу. Его следовало немного добалластировать, чтобы он стал устойчивой платформой. Выдержит ли палуба? Или палубы провалятся, рискуя утопить оба аппарата? Пилот Ральф Холлис попытался «приземлиться» на пробу, и палуба показалась достаточно прочной.
Во время третьего погружения пилот Дадли Фостер, инженер-механик и бывший летчик палубной авиации (который дольше всех отработал в качестве пилота «Элвина»), опустил глубоководный аппарат на палубу и забалластировал его на 9 кг тяжелее нейтральной плавучести. Оказавшись на месте, Фостер должен был подвести аппарат как можно ближе к дыре, ведущей на огромную лестницу, потому что запас кабель-троса у «Ясона Джуниора» составлял всего 45 м. Иллюминаторы «Элвина» были наклонены вниз под углом 45 градусов, поэтому обзор впереди глубоководного аппарата был не очень-то велик. Когда Фостер подобрался к дыре достаточно близко, все, что он «мог видеть из переднего иллюминатора, — это большую зияющую дыру».
Боуэн держал на коленях пульт управления; управляемый пальцем джойстик справа позволял ему вести аппарат горизонтально, а тумблер слева — опускать и поднимать. В середине прототип наручного портативного телевизора Sony выдавал черно-белое изображение с носовой камеры «Ясона Джуниора».
Внутри «Элвина» Баллард нервничал, глядя, как Боуэн пристально вглядывается в этот маленький экран. Боуэн вывел «Ясона Джуниора» из «гаража» и медленно направил его вперед. Если бы аппарат двигался быстрее или задел обломки, то поднял бы облако мути и потерял ориентацию.
Все участники миссии осознавали, что существует тонкая, как лезвие бритвы, черта между «Ясоном Джуниором» как улучшенным роботом и «Ясоном Джуниором» как дорогостоящим и смертоносным якорем для «Элвина» и его экипажа. Кабель-трос был снабжен резаком, чтобы позволить «Элвину» спастись в случае опасности, но никто не был уверен, что это сработает. «Если я попаду в обломки таким толстым кабелем, — вспоминал Боуэн, — и аппарат погибнет или что-нибудь полностью откажет, мы останемся здесь» — и, возможно, навеки.
В один момент ярко-желтый кабель-трос диаметром около полутора сантиметров зацепился за кусок отломанных перил. Боуэн не понял, что произошло, и щелкнул тумблером, чтобы размотать кабель. Вместо того чтобы распутаться, «Ясон Джуниор» рванулся назад, к большому аппарату, и запутавшийся кабель потянул «Элвина» к темной дыре. «Элвин» и дистанционно управляемый аппарат образовали сдвоенную движущуюся систему, контролируемую как человеком, так и удаленно. Теперь, по воле этого натянутого кабеля, отношения между пилотируемым и непилотируемым аппаратом стали напряженными в буквальном смысле. Поняв свою ошибку, Боуэн выключил лебедку, провел дистанционно управляемый аппарат назад, чтобы осторожно выбрать кабель-трос, увел его немного в сторону и снял трос с ограждения.
Несмотря на все эти затруднения, когда «Ясон Джуниор» вертикально опускался в дыру на лестницу, Боуэн полностью слился с роботом: «Я находился как бы в этом самом глазу аппарата. Я смотрел на колонны у подножия лестницы. Я пытался вернуться, двигаться вперед… Это было все равно что игра». В то же время пилот «Элвина» контролировал все системы и сенсоры своего аппарата.
Боуэн должен был одновременно отождествлять себя с дистанционно управляемым аппаратом и отвечать на требования человеческой системы вокруг него. «Иногда пилот говорил: "Уведи эту штуку отсюда!" или "Мы закончили, уходим. Включай лебедку". Или Боб говорил: "О'кей, все идет хорошо. Двигайся туда. Двигайся сюда. Осмотри это". И мне нужно было пытаться балансировать между всеми этими требованиями».
Но Боуэн все равно чувствовал, что переносится внутрь аппарата: «Я просто летал в этой штуке. Мой разум находился не внутри аппарата. Он был в видеокамере», — когда аппарат проникал внутрь огромных обломков корабля и опускался почти на 5 км. Двадцать лет спустя операторы военно-воздушных сил США скажут то же самое об управлении дронами-беспилотниками в Афганистане, а геологи — о дистанционно управляемых аппаратах на Марсе. Однажды Боуэн развернул «Ясона Джуниора», чтобы «оглянуться» на «Элвин». «Когда мы сидели внутри "Элвина", — вспоминал он, — мимо нас вдруг прошли огни фар, как в темную летнюю ночь, когда машина проезжает мимо окон вашей спальни. Огни фар проникли внутрь темной сферы. И у сидящих людей задрожали ноги — что это было? Ну, это же были мы. Ох, да, это были мы. Мы в тот момент просто пытались осознать, кто мы и где мы». Во время другого погружения пилот Уилл Селларс был поражен тем, как просто наличие «Ясона Джуниора» в виде удаленно управляемой группы огней позволяет ему видеть гораздо дальше, чем было бы возможно без аппарата.
Погружение вниз вдоль лестницы продолжалось чуть больше 20 минут, когда Фостер прекратил его и приказал завести аппарат в «гараж» — «Элвину» нужно было возвращаться на поверхность к обеду. Но видеозапись уже была готова — главные 20 минут всей экспедиции.
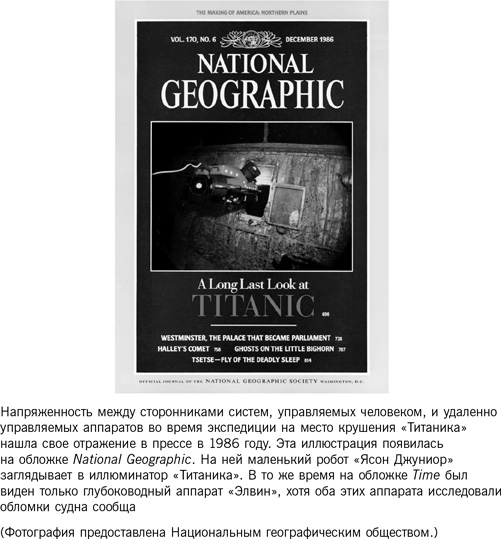
Работа «Элвина» и «Ясона Джуниора» в связке была характерной особенностью новой специальной программы National Geographic. Более того, связка «Элвин»/«Ясон Джуниор» появилась на обложке журнала Time. Она была искусно запечатлена художником Кеном Маршаллом. Любопытно, что на ней можно разглядеть только «Элвина». Возможно, именно поэтому столько людей считает, что «Титаник» открыл именно «Элвин». Напротив, National Geographic поместил на обложку только «портрет» «Ясона Джуниора», заглядывающего в иллюминатор.
Как и обнаружение обломков годом ранее, исследования внутри «Титаника» поразили воображение публики не только возможностью заглянуть в глубины океана, но и потенциалом роботов. Несколько лет спустя драматизированная версия исследования корпуса судна стала сценой, открывающей фильм Джеймса Кэмерона «Титаник», второй по популярности из всех когда-либо снятых кинокартин. В том эпизоде робот не просто заглянул в иллюминатор затонувшего корабля — он позволил нам погрузиться во всю ставшую историей драму, которая там разыгралась.
«Ясон Джуниор» проплыл вокруг корпуса «Титаника» и проник внутрь, что стало апофеозом первых глубоководных роботов — «блуждающих глаз». Эти глаза были способны на многое, помимо того, что снижали риск для людей, сидевших в «Элвине», что делал «Ясон Джуниор», проникая в слишком маленькие или слишком опасные для крупного аппарата места. Но эти задачи напоминали первые задания «Элвина» — «пойди и осмотрись там», и так продолжалось до тех пор, пока гидроакустическая навигация и новые научные методы не превратили такие аппараты в общепризнанный научный инструмент, собирающий формальные данные.
Комбинация систем, управляемых людьми и управляемых дистанционно, оказалась не особенно выгодной для группы «Элвин»: после «Титаника» она больше не использовалась.
Баллард и его лаборатория все еще не воплотили в жизнь первоначальный проект телеприсутствия на морском дне «Ясона» и «Арго». В течение следующих нескольких лет полноразмерный аппарат «Ясон» обрел четкие очертания и прошел через серию испытаний на мелководье. «Арго» был переоснащен из салазок для камеры в полномасштабный гараж, способный вместить в себя «Ясон», имевший размеры «фольксвагена». Эта новая версия «Арго» получила название «Хьюго». У новых аппаратов были волоконно-оптические кабели, адаптированные для телекоммуникационных систем, способные передавать гигабайты информации в секунду на большое расстояние без потери качества.
Это уже были не просто «блуждающие глаза», с которых дистанционно управляемые роботы начинали свое проникновение в глубины океана. Эти аппараты быстро превратились в движущиеся головы с цифровыми сенсорами, которые были способны собрать на морском дне огромное количество данных и передать их на поверхность. Они не были полностью автоматическими, но управлялись не только вручную (никаких тумблеров, как на «Элвине») — скорее, они имели супервизорное управление, которое Дана Йоргер и его команда разработали для «Ясона». Почти все «хитроумности» находились на поверхности — сам «Ясон» представлял собой не более чем платформу, обеспечивающую электроэнергию, телеметрию и мобильность любому количеству прикрепленных к нему камер и сенсоров.
В сентябре 1988 года «Ясон» впервые вышел в море, в канал Худ в системе заливов Пьюджет-Саунд у побережья штата Вашингтон. Аппарат выполнял поисковые работы на мелководье для военно-морских сил. Весной 1989 года состоялся первый глубоководный тест во время археологической экспедиции в Средиземном море (предшествующей более поздней экспедиции NR-1, обнаружившей «Скерки D»).
Ликование по поводу того, как плоды десятилетней работы медленно погружаются на морское дно, длилось недолго. Оказавшись в воде, связка «Хьюго»/«Ясон» отличалась большой массой, но низким весом. После того как судно снималось с якоря и килевало, кабель провисал, затем, на следующем гребне волны, снова туго натягивался. Во время третьего погружения новой системы, гордости Балларда, кабель оторвался от «Хьюго», и все приспособление тихо опустилось на глубину 800 м. Возможно, это стало первым намеком на то, что дистанционно управляемый аппарат необязательно должен быть более безопасен, чем глубоководный аппарат с людьми на борту.
После серии героических экспромтов команде Лаборатории глубоководных погружений удалось достать «Хьюго» и «Ясона» со дна. «Хьюго» окончательно списали, заменив миниатюрными салазками с камерой, которые назвали «Медея» (в честь легендарной жены — убийцы Ясона). Этот аппарат просуществовал до наших дней. «Медея» не выполняла функцию гаража для «Ясона», а действовала как тяжелый груз, чтобы компенсировать вертикальные колебания длинного кабеля, тянущегося на поверхность. «Ясон» был связан с «Медеей» через способный держаться на воде кабель-трос длиной всего 150 м и мог двигаться только в пределах окружности этого радиуса, в результате чего на аппарат не действовали перемещения судна на поверхности моря. «Медея» также была снабжена камерой и навигационной системой, чтобы приглядывать за «Ясоном» во время работы как бы с высоты птичьего полета.
Эти импровизированные изменения системы «Арго»/«Ясон» выявили ее неожиданное отличие от управляемых человеком аппаратов. «Элвин» должен был пройти ряд строгих испытаний, выполняемых ведомствами военно-морских сил, чтобы быть признанным безопасным для сидящих внутри людей. Тесты в рамках испытаний затрагивали всё, начиная с отслеживания всего пути материалов, из которых был изготовлен корпус, вплоть до места их происхождения и заканчивая любыми инженерными изменениями, которые могли быть сделаны во время проводящегося два раза в год технического обслуживания. По сей день не существует никакого программного обеспечения для жизненно важных систем «Элвина». Это старомодный кусок «железа», простой и безопасный. Напротив, дистанционно управляемые аппараты не являлись объектами, требующими обязательной сертификации, поэтому могли быть изменены легко и без особых затрат, прямо в полевых условиях. Более того, поскольку программное обеспечение также не нуждалось в сертификации, его можно было менять даже в ходе операции. За первые несколько лет своего существования «Ясон» прошел через многочисленные изменения «железа» и постоянную переработку программного обеспечения. Когда «Ясон» появился, сбои программ были обычными явлением, и некоторые из них могли бы поставить под угрозу жизни экипажа, если бы он был на борту.
Летним днем 1988 года, спустя два года после исследования «Титаника», я спускался по лестнице старого, крытого зеленым алюминием здания в Вудс-Хоуле с маленькой рисованной вывеской «Лаборатория глубоководных погружений». Я искал работу и пришел сюда, чтобы встретиться со Скипом Маркетом, одним из первых инженеров «Элвина», ставшего основателем лаборатории вместе с Баллардом. Расхаживая по лаборатории, я видел экзотических роботов, оболочки, выдерживающие большое давление, и многие другие вещи, незнакомые для меня. «Эта штука побывала внутри "Титаника"», — сказал Маркет, показывая на «Ясона Джуниора», лежавшего на лабораторном столе открытым с вытащенными наружу электронными потрохами.
Но внутри и вокруг этих роботов были хорошо знакомые мне вещи — электроника, микропроцессоры, руководства по программному обеспечению. В этот момент я попался на крючок — я мог привнести свои умения и страсть в эту необычную, чужую область практической науки. Страстно стремясь путешествовать по всему миру, выполняя инженерные работы, конструируя электронику, которая будет работать в экстремальных условиях, а не сидеть в маленьком кабинете офиса, я стал работать в Лаборатории глубоководных погружений младшим инженером.
После того как основные системы «Ясона» подтвердили свою пригодность, Йоргер обратил все свое внимание на развитие улучшенных технологий супервизорного управления, которые могли помочь дистанционным исследованиям. Он взял на работу меня, инженера-электротехника, чтобы я подключился к разработке электронных и встроенных систем для такой автоматизации. В частности, я должен был работать над двумя проектами: точная навигационная система, использующая ультразвуковые сигналы, для навигации «Ясона» и компьютерная начинка для нового «автономного» аппарата под названием АБИ (хотя по сути дела я работал и над другими системами «Ясона»). В течение нескольких следующих лет мы применяли «Ясона» в самых разных проектах, каждый раз создавая новый код и делая что-то новое с системами управления, а также получая знания о дистанционных исследованиях.
На что это похоже — управлять роботом в глубинах океана? Прежде всего мы должны определиться с термином «робот». Обычно его используют в отношении аппаратов типа «Ясона», но в них нет почти ничего напоминающего автономность. С технической точки зрения на самом деле это нечто вроде tabula rasa. На борту относительно мало вычислительных ресурсов, их хватает только на то, чтобы включать и выключать фары или другие приборы, активировать двигатели и немного заниматься остальным хозяйством. Видеосигналы передаются сразу по волоконно-оптическому кабелю, а все показания приборов просто мультиплексируются с помощью компьютера «Ясона», чтобы отправиться наверх для обработки. Даже когда «Ясон» делал что-то «автоматически» — например, поддерживал постоянную глубину, — цикл обратной связи проходил через компьютер на судне.
Внешне аппарат тоже не выглядел ни элегантным, ни человекоподобным. Верхняя часть «Ясона» представляла собой сплошной блок пенопласта для обеспечения плавучести, а нижняя — неразбериху из кронштейнов, герметичных камер и проводов. Части всего этого были скреплены друг с другом при помощи технологического скотча и хомутов.
Несмотря на величественное человеческое имя, робот едва ли был антропоморфным, но, присмотревшись, можно было различить нечто вроде лица спереди, где были собраны камеры и манипуляторы выполняли свою работу. Самой лучшей аналогией для «Ясона» был телескоп — это нечто, через что вы смотрите. На самом деле, когда аппарат работал хорошо, он становился будто бы невидимым, позволяя людям на поверхности смотреть на дно моря и забывать о посреднике при передаче картинки. В этом и заключается суть ощущения присутствия.
Также «Ясон» втянул надводное судно, свою плавучую базу — один из самых старых в истории человечества движущихся управляемых аппаратов — в более тесное взаимодействие с роботом. Когда погружался «Элвин», на надводном судне могло происходить все, что нужно его команде, оно могло даже сдвинуться с места, чтобы собрать еще какие-либо научные данные. В случае с «Ясоном» судно и робот были всегда связаны кабелем, им приходилось четко координировать свои действия. Мы прокладывали компьютерное соединение между пунктом управления роботом и системой удержания корабля в заданной точке так, чтобы штурман в пункте управления на задней палубе мог контролировать судно. Один удар по клавиатуре компьютера, и судно проходит на несколько метров вперед, или влево, или медленно движется по прямому отрезку пути.
Внизу тянулся огромный трос, за ним — «Медея», а затем — «Ясон». Нужно было отслеживать множество параметров, отображавшихся на навигационном экране, управляемом специально разработанным Даной Йоргером программным обеспечением, которое подгонялось под каждую экспедицию и постоянно изменялось прямо в пути. «Это как балет», — заметил Мартин Боуэн. Он сравнивал это с аркадной видеоигрой, только вместо того, чтобы каждые несколько минут вкладывать в автомат четвертаки, здесь вы фактически вкладываете тысячедолларовые банкноты.
Пункт управления «Ясоном» состоял из пяти или шести 27-дюймовых видео- и компьютерных мониторов, прикрепленных к стене и демонстрирующих изображения с множества камер «Ясона» и навигационные данные. Между ними располагался ряд пультов управления: для пилота, для инженера, который следил за системами аппарата и управлял лебедкой, и для штурмана. Регистратор данных менял видеокассеты и фиксировал все действия. Такая расстановка оставляла много места для ведущего ученого, который обычно сидел непосредственно позади пилота, чтобы управлять погружением, и еще 10–12 человек: других ученых, инженеров, аспирантов и кинооператоров из средств массовой информации.
Когда все шло по плану, весь пункт управления сосредотачивался на морском дне. «Теперь это мир телеприсутствия, — говорил Боуэн, — там я забываю о своем теле и проецирую себя на дно океана, и я должен заставить этот аппарат танцевать».
Пилоты считали такое погружение похожим на погружение в «Элвине», но социальное пространство, в котором они работали, было другим. Присутствие в пункте управления множества людей, конечно, могло отвлекать. «Данных извне слишком много, — говорил Уилл Селларс, бывший пилот «Элвина», ставший пилотом «Ясона». — Ты и без того просеиваешь тонну информации со всех этих экранов. А еще этот человек здесь, и ты пытаешься взаимодействовать с двумя людьми там». Говоря словами Боуэна, «с роботами у тебя за спиной стоит полная галерка экспертов… У каждого из них своя область интересов, которые они хотели бы удовлетворить во время твоего погружения. А я должен оценить их предложения и решить, куда мне направить аппарат».
Пилоты научились так сужать свое внимание, чтобы слышать голоса не всех, а только нескольких присутствующих. Если компас не давал правильные показания или погода на поверхности портилась, пилот мог спросить об этом штурмана. Я стоял на вахте на этом посту и научился в большинстве случаев предугадывать, что потребуется пилоту и когда оно ему потребуется: немного сдвинуть судно; дать информацию о точности навигационной позиции; сообщить: «Внимание, ты подошел слишком близко к этой штуке». Постепенно у пилота складывалось представление о рельефе поверхности. «Я просто начинал наносить предметы на карту у себя в голове, отмечал, какие есть препятствия, как высоко мне нужно пролететь, как низко... Я обладал одним преимуществом: меня окружали люди, которые помогали мне со всем этим». После нашего общего морского опыта мы с Мартином Боуэном стали близкими друзьями.
Новые волоконно-оптические кабели, цифровая передача данных и самые лучшие видеокамеры с высококачественной передачей звука помогали нам перенестись в этот, другой мир. Но это присутствие или то, что Баллард называл телеприсутствием, не было целиком связано с изображением. На самом деле по сегодняшним стандартам оно было примитивным, соответствующим скорее старомодному цветному телевизору, а не цифровым изображениям в высоком разрешении.
Присутствие на морском дне было прочно связано с тем, что происходило в затемненном пункте управления. Пока «Ясон» посылал ультразвуковые импульсы и фотографировал свой путь вокруг мест кораблекрушений, гидротермальных источников или других участков, люди в пункте управления постоянно обменивались мнениями, наблюдали, задавали вопросы, рассуждали о том, что показывают камеры или сенсоры. Такой постоянный научный семинар в реальном времени, посвященный происходящему исследованию, в сочетании с красивыми, западающими в душу образами, которые мы видели, — вот что переносило нас в другой мир. Это было самое главное и неожиданное отличие от «Элвина».
Иногда, когда кто-нибудь спотыкался о твой стул в пункте управления, тебе на секунду казалось, что робот внизу разбился о скалу, и тут ты возвращался в реальность и выпутывал свое тело из плена разума. Это было то, чего управляемые человеком подводные аппараты не могли повторить, то, что роботы делали за нас. В то время как наши тела физически никогда не бывали во многих из этих мест, наш разум и воображение проводили там день за днем, и мы глубоко прониклись подводными пейзажами, над которыми проплывали наши роботы.
Произошедшие изменения повлекли за собой профессиональные противоречия. Археологи, например, привыкли копать и нырять самостоятельно и с трудом адаптировались к миру, где они не контролировали средства доступа к своим раскопкам. Потребовались убеждения с нашей стороны, чтобы они поняли, что на самом деле сидеть в кресле пилота и управлять «Ясоном» с помощью джойстика будет не самым лучшим приложением их талантов.
«Ясон», конечно, не занимался археологией вообще — он только передавал по кабелю данные. Когда информация загружалась, инженеры и программисты составляли карты и мозаики, но команде археологов оставалось пространство для интерпретации. Они не исследовали морское дно физически. Они занимались исследованиями, но теперь они исследовали данные, сидя около компьютера. Одним это нравилось, другие раздражались.
Вопрос о профессиональном самоопределении не ограничивался исключительно археологами или учеными. В одной экспедиции вопрос самоопределения коснулся фотографии и дошел до абсурдного умозаключения. Во время экспедиции к остаткам «Лузитании» неподалеку от ирландского побережья у нас на борту был фотограф из National Geographic, отличавшийся самомнением, какого можно ожидать у представителя столь широко известного журнала. Он щелкал затвором повсюду на корабле, снимая все операции на поверхности, но понимал, что настоящее действие разворачивается на дне, где сделать фотографии (и прославиться благодаря им) у него возможности не было.
Вначале он вызвался управлять аппаратом, чтобы делать серию снимков, но пилот и руководители, естественно, отвергли эту идею, так как небезопасно было доверять управление человеку, который никогда не тренировался в этом деле и не имел никакого технического образования. Но National Geographic был одним из «заказчиков» нашей экспедиции и вложил большие суммы, чтобы рассказать о ней в журнале и снять фильм, поэтому они имели некоторые права.
В конце концов мы нашли решение. Я убрал кнопку камеры с пульта управления, прикрепил ее к двухметровому проводу и обернул лентой, чтобы получилось маленькое пусковое устройство, помещающееся в руке. Так пилот дистанционно управляемого аппарата загружал пленку, устанавливал камеры и в действительности маневрировал аппаратом, чтобы найти нужный кадр, а фотограф из National Geographic нажимал кнопку спуска затвора камеры. Как и следовало ожидать, когда рассказ о нашей экспедиции появился в журнале, вся слава досталась не Мартину Боуэну или другим пилотам «Ясона», а фотографу.
В течение нескольких следующих лет наша группа продолжала управлять «Ясоном», улучшая и дорабатывая его, стараясь, чтобы он стал пригоден как научный инструмент. Баллард занимал уникальное положение в команде, поскольку его связи с военно-морскими силами и National Geographic позволяли нам участвовать в интересных, необычных и новаторских проектах, которые никогда не получили бы финансирование через традиционные источники научных исследований, особенно через консервативный Национальный научный фонд содействия развитию науки США. Холодная война только что закончилась, поэтому у военно-морских сил имелись некоторые объекты, с которыми можно было экспериментировать (например, NR 1). Все мы знали, что это не продлится долго; Баллард обеспечил свою поддержку на некоторое время, но у него были собственные намерения, и, в конце концов, он переключится на следующую большую разработку. К тому же его отношения с институтом Вудс-Хоул всегда были натянутыми, и он начал основывать новый центр в городе Мистик, штат Коннектикут, чтобы продемонстрировать собственные проекты. «Ясон» должен был завоевать доверие у ведущих океанографов, если мы хотели, чтобы он оставался востребованным в долгосрочной перспективе.
Неожиданно выявилось одно отличие «Ясона» от «Элвина». Группа «Элвина» являлась эксплуатирующей организацией — они управляли используемым, сертифицированным аппаратом. Примерно каждые восемнадцать месяцев «Элвин» проходил технический осмотр, во время которого в аппарат вносились изменения, хотя чаще инженеры придерживались философии «не трогай то, что работает». Постепенно это привело к серьезному отставанию «Элвина» от современных технологий, особенно в области компьютеров и усовершенствованных сенсоров.
Однако «Ясон» появился в Лаборатории глубоководных погружений — в исследовательской конструкторской группе. Поскольку аппарат не был сертифицирован военно-морскими силами, с ним всегда можно было экспериментировать и вносить какие-то изменения. Он находился в постоянной разработке, и обычно мы завершали переоборудование, только когда аппарат был уже на полпути к месту погружения.
Ученые пребывали в сомнениях. Техника была не апробирована. В некоторых из первых экспедиций возникало столько технических трудностей, что они возвращались только с минимальным набором данных. Во время первых экспедиций случались и угрожающие жизни аварии — однажды, когда мы вытаскивали из воды «Ясона» посреди ночи, на нас упал кран. В другой раз длинный кабель (со смертельно высоким напряжением) размотался на палубе во время шторма в Северной Атлантике. Новые роботы пока не показали себя более дешевыми или безопасными по сравнению с «Элвином». Даже в тех экспедициях, которые прошли хорошо, непродолжительные мгновения феерического успеха были омрачены долгими днями проблем и вынужденного бездействия.
Куда важнее было то, что многие ученые просто не понимали, как такой робот может содействовать успеху в их области науки. «Люди говорят, дистанционно управляемый аппарат? Пфф! А что они будут делать? Это никогда не сработает!» — вспоминал Боуэн. Они выросли, восхищаясь «Элвином», его защищающей экипаж конструкцией, милым названием и десятилетиями безотказной работы (хотя некоторые из более пожилых ученых, конечно, помнили первые десятилетия, когда «Элвин» был ненадежным, уязвимым и часто терпящим поражение). Дистанционная наука выглядела угрожающей для профессионального самоопределения ученого-исследователя. Почему они добровольно должны были отказаться от захватывающих путешествий в глубины?
Еще один член нашей команды вспоминал трудную, гнетущую работу по «преодолению барьеров в глазах потенциальных пользователей, которые не могли увидеть то, что было совершенно очевидно любому инженеру. Я имею в виду, почему вообще нужно объяснять, какая польза от дистанционно управляемого устройства в глубинах океана?» Он считал, что это «социальное явление… целый комплекс явлений». Слоган этого комплекса? «Проект "Элвин"». Два десятилетия шла борьба за поддержание жизнеспособности «Элвина», и со стороны все выглядело так, словно дистанционно управляемые устройства хотят оттяпать у прославленного аппарата кусок пирога.
У Уилла Селларса была интересная точка зрения на эту борьбу. В 1989 году он перешел из пилотов «Элвина» в пилоты «Ясона». Во время экспедиции «Элвина», продолжавшейся примерно три недели, каждый пилот участвовал примерно в пяти погружениях из двадцати. Обычно один и тот же ученый оказывался с пилотом внутри аппарата не более пары раз. Став пилотом «Ясона», Селларс, по его собственному мнению, стал работать в более тесном взаимодействии с учеными, «потому что тут ты контактировал с гораздо бо́льшим их числом».
«Элвин» разрабатывался как поисковый инструмент (и в этом он никогда не был особенно хорош). Поля зрения трех иллюминаторов не перекрывались вообще, чтобы три сидевших внутри человека имели максимальный обзор морского дна в любой момент времени. Но бо́льшую часть времени «Элвин» занимался отбором образцов и манипуляциями, и ученые никак не могли увидеть, что делает пилот, разве что по очереди заглядывали в его иллюминатор, что прерывало работу. Или же они смотрели на экран видеокамеры, как делал Хольгер Яннаш во время галапагосской экспедиции 1979 года. «И вы найдете людей, которые погружались на "Элвине", — вспоминал Селларс, — и наблюдали за происходящим, глядя исключительно в этот четырехдюймовый монитор, расположенный над иллюминатором». Удаленное присутствие оказалось привлекательным даже внутри «Элвина».
Несмотря на это соперничество, в течение нескольких следующих лет мы продолжали сочетать дистанционно управляемые и управляемые человеком аппараты для опытного сравнения впечатлений и качества данных. Я погружался в «Элвине» неподалеку от Сиэтла к гидротермальным источникам хребта Эндевор, чтобы установить вокруг них свои навигационные инструменты. Из кабины мы видели ошеломляющие картины переливающейся воды, бьющей вверх со дна источников. Вода так сверкала, что напоминала гладкие волнующиеся озерца ртути, испещренные короткими черными завитками, которые вились, как повернутые вспять струи сигаретного дыма.
Менее чем через неделю мы вернулись на это место с «Ясоном», который также сделал великолепную видеозапись. Но куда больше мы гордились техническим достижением нашего погружения, когда мы использовали «Ясона», чтобы взять химические пробы из этих плюмажей. Мы заставили аппарат пролететь с помощью автопилота, контролируемого компьютером, через гидротермальный шлейф выходящих газов (аналог дымовой трубы), чтобы провести точные химические измерения. В результате этого исследования удалось создать трехмерную химическую карту плюмажа извергающейся жидкости, которая позволила химику Расселу Макдаффу впервые точно определить, как гидротермальная жидкость смешивается с окружающей морской водой.
Это был первый осторожный намек на технологии, которые реализуются несколько лет спустя, во время картографирования мест древних кораблекрушений в районе банки Скерки — утверждение супервизорного управления в понимании Даны Йоргера. Сочетание навигации, датчиков, камер и точного управления посредством компьютера превратило робота в нечто, полностью отличающееся от так называемого движущегося глаза или управляемого людьми аппарата.
«Ясон» оцифровывал морское дно, создавал виртуальные трехмерные модели, которые могли существовать только внутри компьютера. Интеллект, или автономность, значились в конце списка его характеристик; вся конструкторская мысль была направлена на то, чтобы обеспечить движение аппарата в заданном направлении, и исключительно в нем. Интеллектом должен был обладать исследовательский штаб, который теперь вместо того, чтобы сидеть внутри «Элвина», занимал место на борту судна в пункте управления «Ясоном» и еще активнее погружался в совокупность данных через недели или месяцы после экспедиции.
Тем не менее споры становились все более яростными, потому что были немаловажными. Какой способ присутствия человека является предпочтительным на дне моря? Этот вопрос затрагивал научную политику государства и вопросы финансирования. Официально Вудс-Хоул придерживался позиции «оба направления одинаково ценны»; это означало, что океанографический институт делает большие вклады, как финансовые, так и культурные, и в «Элвина», и в «Ясона». Но океанографы — маленькое сообщество с ограниченными ресурсами, и оно не может позволить себе дважды выделять ресурсы только ради того, чтобы избежать споров.
«Элвину» было почти сорок лет. Хотя бо́льшую часть оборудования аппарата заменили в ходе многочисленных технических осмотров, основная конструкция была произведена в 1960-е годы, и титановая сфера уже доживала свои дни из-за усталости металла. Нужно ли заменить «Элвина» новой, полностью модернизированной моделью? Как будет выглядеть новый «Элвин»? Какие миссии он сможет выполнять?
Пользующаяся влиянием группа ученых утверждала, что новый «Элвин» должен быть сконструирован так, чтобы погружаться на 10 000 м, по сравнению с возможностью погружения на 4500 м у существующего аппарата. Приводя красочную историю с гидротермальными источниками, они доказывали, что есть убедительные причины погрузиться глубже, хотя бы для того, чтобы все осмотреть. Они апеллировали к чувству национальной гордости, так как японцы построили батискаф под названием «Синкай», который мог погружаться на 6500 м, и некоторых задевало, что «Элвин» больше не является самым глубоководным аппаратом.
Конечно, если посмотреть, на какую глубину в действительности чаще всего погружался «Элвин», то она колеблется от 2400 до 4000 м, где ученые изучали гидротермальные источники. Заявленная величина 10 000 м была просто астрономической, и эта идея вскоре забуксовала, так как стало очевидно, что дистанционно управляемые или автономные аппараты могут исследовать эти глубины с меньшими затратами и без всякого риска для жизни.
Вторым аргументом в пользу нового «Элвина» было качество изображения. «Мы все знаем, насколько лучше видно из "Элвина" по сравнению с дистанционно управляемым устройством», — настаивали ученые. В то время «Ясон II», улучшенный и увеличенный аппарат, только входил в эксплуатацию, но не поддерживал запись видеоизображения высокого разрешения. Я спросил его конструкторов (моих бывших коллег), почему они не добавили HD-видео, и они ответили: «Это не было обязательным требованием ученых».
К тому времени я перешел из института Вудс-Хоул в Массачусетский технологический институт и следующие шесть лет провел в комиссиях, которые осуществляли контроль над «Элвином» и «Ясоном» от лица правительственных спонсоров. При этом я выступал в роли, совмещающей адвоката дьявола и социолога. Я видел, что ученые мыслят достаточно путано, поэтому начинал задавать вопросы, чтобы помочь прояснить разногласия. Если управляемый человеком аппарат должен сохраниться из-за качества изображения, не значит ли это, что перед погружением надо пройти обследование у офтальмолога? Нет, все не так, настаивали они. «Дело в концентрации внимания, — сказал один из них. — Всем известно, сколько народа собирается в пункте управления "Ясоном", а в "Элвине" находятся только двое ученых и пилот, и они могут по-настоящему сосредоточиться».
Но должна ли именно способность сосредотачиваться оправдывать строительство нового глубоководного аппарата? Ученые пытались сослаться на личный опыт.
Как и в случае с другими типами дистанционно управляемых роботов, обоснование уникальных человеческих способностей, требующих непосредственного присутствия людей на дне моря, изменялось вместе с развитием техники. В конце концов один ученый встал и сказал: «Мы все знаем, что возможность погрузиться на глубину в "Элвине" была одним из факторов, который подтолкнул нас к изучению этой области науки, когда мы окончили колледж. Мне не хочется думать, что у наших выпускников не будет такой возможности».
«Наконец-то мы сдвинулись с мертвой точки», — подумал я. Этот аргумент относился к области профессионального самоопределения: мы — полевые ученые, мы отправляемся в поле, а наше поле — это глубины океана. Нам нужно вдохновлять и обучать следующее поколение. Затем был приведен культурный аргумент: «Элвин» — это символ, люди связывают его с институтом, он привлекает людей к науке об океане и к науке в целом. Очень хороший аргумент — сродни «вдохновляющей роли космических полетов», которую озвучивали, чтобы поддержать пилотируемые полеты в NASA.
На кону были реальные ресурсы: весь океанографический бюджет Соединенных Штатов составлял примерно 100 млн долларов, а создание нового «Элвина» оценивалось по меньшей мере в 40 млн, то есть почти в половину. Более того, стоимость роботизированных аппаратов колебалась от нескольких сотен тысяч до нескольких миллионов долларов, а значит, новый «Элвин» стоил бы как сорок или даже сто новых роботов. С помощью такого количества роботов можно охватить большую площадь океанского дна. Но такая математика имеет смысл только в том случае, если финансирование строительства аппарата — это игра, из которой победителем выходит только один участник. Если «Элвин» может обеспечить финансирование от конгресса на уровне, недоступном никакому другому аппарату, тогда, конечно, почему бы не построить новый — зачем упускать доступные средства? В свою очередь, если деньги на финансирование нового «Элвина» будут взяты из средств других проектов, то по его поводу разгорятся серьезные споры. Но, конечно, это был вопрос научной политики Вашингтона, а не технической осуществимости.
Как и в космической отрасли, военном деле, авиации и многих других областях, столкнувшихся с новым способом работы с помощью роботов, самые острые аргументы были связаны не с особыми техническими возможностями, а с гордостью, культурой и профессиональным самоопределением. В конечном итоге комиссия, большинство которой составляли ученые, использующие «Элвина», рекомендовала построить новый «Элвин», и институт Вудс-Хоул решил сделать новую прочную сферическую капсулу с иллюминаторами бо́льшего размера, а почти все остальное оставить от старого аппарата. Теперь «Элвин» мог погружаться на 6000 м, но не на 10 000 м, как вначале требовали ученые.
После капитального ремонта получился скромно модернизированный «Элвин». Теперь поля зрения иллюминаторов перекрывались, а мониторы стали больше. Также новый «Элвин» оснастили набором электроники и программного обеспечения, первоначально разработанным для «Ясона» и автономных роботов.
Таким образом, удаленный способ исследований вовсе не вытеснял прямое присутствие людей. Эти способы дополняли друг друга. Поначалу у «Ясона» был примитивный манипулятор, поэтому «Элвин» представлял собой аппарат, отличающийся изяществом и силой. Когда у «Ясона II» появились такие же руки, как у «Элвина», ученые выделяли «Элвина» за качество изображения, хотя сами же не требовали сделать HD-видео на новом «Ясоне». Постепенно роботизированные части проникли под корпус «Элвина». Теперь у него была доплеровская гидроакустическая система, такая же, как та, которая использовалась при навигации дистанционно управляемых и автономных аппаратов, и управляющее программное обеспечение «Ясона», позволяющее большому аппарату двигаться по точным маршрутам и придерживаться выбранных участков.
Чем же стал современный «Элвин», как не роботом, внутри которого сидят люди? Волоконно-оптические кабели теперь были толщиной в волос и могли передавать на поверхность гигабайты информации. Почему бы не присоединить один из них к «Элвину» и не позволить научной группе на поверхности присоединиться к участникам погружения в реальном времени? Эта идея предлагалась годами, но так и не была осуществлена. Уничтожила бы она «автономность» погружения «Элвина»? Как бы то ни было, пилоты глубоководного аппарата и их научные партнеры ревностно хранили дух товарищества и сосредоточенное уединение своей титановой сферы.
На пороге XXI века появились целые классы новых аппаратов. Эти автономные подводные аппараты могли двигаться с помощью энергии собственной батареи, без всяких тяжелых кабелей, соединяющих их с судном. Они могли быть меньше, легче и проворнее, чем аппараты типа «Ясона», и передвигаться с большей точностью, чем прежде, поскольку никак не зависели от судна. В то же время они редко плавали полностью сами по себе — при любой возможности поддерживали связь с судном посредством гидроакустических сообщений. Даже при низкой пропускной способности такие системы могли каждые несколько минут посылать эквиваленты текстовых сообщений с информацией о состоянии аппарата и его положении. Как и «Ясон», они работали эффективнее всего, когда придерживались поставленной задачи, а их реальный вклад в развитие науки включал в себя, как и в случае с «Ясоном», оцифровку морского дна. Мы подробнее расскажем об «автономности» этих аппаратов в главе 6.
Тем временем появляются еще более современные аппараты, благодаря которым границы между системами, управляемыми человеком, дистанционно и автономно, размываются. В 2009 году аппарат института Вудс-Хоул побил рекорд самого глубокого погружения, опустившись более чем на 11 000 м в Марианскую впадину. Это был не воспроизведенный «Элвин» и не традиционный дистанционно управляемый аппарат, а скорее гибридный дистанционный аппарат под названием «Нерей», который мог управляться дистанционно (через кабель) или действовать автономно (без каких-либо ограничений). Как и «Ясон», «Нерей» работал с плавучей базой, то есть не отходил от своих операторов дальше, чем на несколько километров. Как ни печально, в 2014 году «Нерея» потеряли в желобе Кермадек у берегов Новой Зеландии. Возможно, он был раздавлен колоссальным давлением на своей рабочей глубине 10 000 м. Ни один человек при этом не пострадал.
Дистанционное присутствие на дне океана вдохновляет и фанатиков науки, и заядлых путешественников, при этом тело исследователя, который сидит перед монитором, не испытывает никакого напряжения. Вначале поступающие данные кажутся неосязаемыми, разочаровывающими. Требуется немного воображения, чтобы погрузиться в мозаику цифровых фотографий или батиметрических карт. Но любая из них — это двери в новый мир, который едва ли можно представить себе внутри сферы «Элвина». Здесь каждый волен в течение многих месяцев заниматься исследованиями в часы досуга и обсуждать их с коллегами по всему миру. Здесь каждый может проплыть над обломками древнего кораблекрушения и посмотреть на них с выбранного ракурса.
С одной стороны, все, что мы сделали, — это изменили место нахождения людей и время, за которое они выполняют свою работу. Тем не менее, сделав это, мы трансформировали сущность самой работы, и таким образом поменялось представление о том, что значит быть океанографом, археологом, исследователем.

