Книга: Дроны. Оружие XXl века
Назад: Глава 2 Воздушные дроны Владимира Бекаури
Дальше: Раздел III Дроны Израиля
Глава 3
Надводные и подводные дроны Владимира Бекаури
С начала 1920-х гг. над советским руководством и его малограмотными маршалами и адмиралами довлел призрак Гранд-Флита. Это комсомольцы и пионеры лихо распевали: «…и на любой британский ультиматум воздушный флот сумеет дать отпор». А вот начальство смертельно боялось 15- и 16-дюймовых пушек британских дредноутов. Наш флот строился исключительно с расчетом на бой на минно-артиллерийской позиции.
Бекаури, правильно оценив конъюнктуру в руководстве советских ВМС, предложил несколько проектов сверхмалых подводных лодок. Вот, мол, подойдет британский Гранд-Флит к Кронштадту или Севастополю на пушечный выстрел, а наши сверхмалые подводные лодки тут как тут. Мало того, сверхмалую подводную лодку можно доставить для диверсий и в отдаленные точки. Нет, не на верблюдах, а на… самолётах.
Идеи Бекаури заворожили наших военморов. И вот в 1934 г. в составе 1-го отдела Остехбюро была создана конструкторская группа, проектировавшая подводные лодки. Главным конструктором 1-го отдела был инженер Ф.В. Щукин, но общее руководство осуществлял Бекаури.
В этом отделе в 1934–1936 гг. параллельно проектировались: аэроподводный самодвижущийся снаряд (АПСС), позже её называли телемеханической подводной лодкой; автономная подводная лодка (АПЛ); радиотелеуправляемая подводная лодка; малая подводная лодка водоизмещением 60 т.
АПСС представляла собой сверхмалую (надводное водоизмещение 7,2 т, подводное 8,5 т) подводную лодку, вооруженную одним носовым неподвижным торпедным аппаратом. Управление производилось двумя способами: обычным (единственным членом её экипажа) и дистанционным. В последнем случае прорабатывалась возможность управления АПСС с так называемых «водителей» — с надводных кораблей или самолётов. «Волновое управление» должно было осуществляться с помощью установленной на этих «водителях» специальной аппаратуры «Кварц» (разработка № 134), созданной специалистами того же Остехбюро. В «телемеханическом» варианте АПСС вместо торпеды несла установленный на её месте заряд взрывчатки весом 500 кг.
Прочный корпус был сигарообразной формы, с двумя накладными килями, разделен на 5 отсеков. В съемном носовом отсеке размещался заряд ВВ, снабженный неконтактным взрывателем. Второй отсек содержал носовую полубатарею аккумуляторов (33 элемента) и часть вспомогательной аппаратуры телеуправления. Третий отсек — центральный — пост ручного управления. Здесь находились кресло водителя, штурвал, контрольные приборы и перископ, выдвигавшийся над корпусом на 65 сантиметров. Сверху место водителя закрывала прочная рубка с четырьмя иллюминаторами и входным люком. В отсеке также размещалась основная часть аппаратуры телеуправления, балластная, уравнительная и торпедозаместительная цистерны, механизмы управления торпедным аппаратом. В четвертом отсеке находилась кормовая полубатарея аккумуляторов (24 элемента) и часть аппаратуры телеуправления с рулевыми машинами, работающими на сжатом воздухе. В пятом отсеке размещался электромотор постоянного тока мощностью 8,1 кВт и гребной вал с винтом.
В корме имелось хвостовое оперение с рулями. В прочных килях были установлены 4 баллона на 62 литра сжатого воздуха, используемого для продувки цистерн и работы элементов автоматики. Между килями располагался открытый торпедный аппарат под 457-мм торпеду.
Сверху на прочном корпусе были установлены мачты антенного устройства, а на верхней поверхности второго и пятого отсеков — иллюминаторы с фарами, направленными вверх, служившими для опознавания и наблюдения снаряда в темное время. На кормовом отсеке крепился прибор, периодически выбрасывающий в воду флуоресцирующий состав зеленого цвета, облегчавший слежение за снарядом в светлое время. Перед рубкой был установлен аварийный буй с электролампой и телефоном. Транспортно-подвесные узлы располагались сверху над вторым и четвертым отсеками, расстояние между узлами составляло 4,9 метра.
Основным режимом управления АПСС являлось управление по радио при визуальном слежении за ним с самолёта-водителя или корабля. Оно осуществлялось путем передачи шифрованных радиосигналов в УКВ-диапазоне при надводном положении АПСС или в длинноволновом диапазоне при погружении на глубину 3 метра. АПСС имел специальные приемники УКВ и ДВ с дешифратором, который преобразовывал радиокоманды в посылки постоянного тока, управлявшие элементами автоматики снаряда. Вспомогательным режимом было механическое управление, которое использовалось с помощью механического автоматического курсопрокладчика. Этот режим использовался на глубине 10 метров, движение в таком режиме могло продолжаться до пяти часов. Предусматривалось и ручное управление, в котором все принципы управления сохранялись те же, что при радиоуправлении.
В качестве носителя и пункта воздушного управления АПСС планировался гидросамолёт АНТ-22, созданный бюро А.Н. Туполева. АНТ-22 мог транспортировать одну сверхмалую подводную лодку типа АПСС на внешней подвеске, а в переоборудованных поплавках даже две. Дальность полёта позволяла ему доставлять этот груз в точку, удаленную от базы на 500–600 км.
Идея доставки сверхмалой подводной лодки самолётом и управления её с самолёта была полнейшим техническим бредом. Тем не менее, А.Н. Туполев простроил опытный образец «морского крейсера» МК-1 (АНТ-22). «Крейсер» представлял собой цельнометаллический двухлодочный гидросамолёт-катамаран.
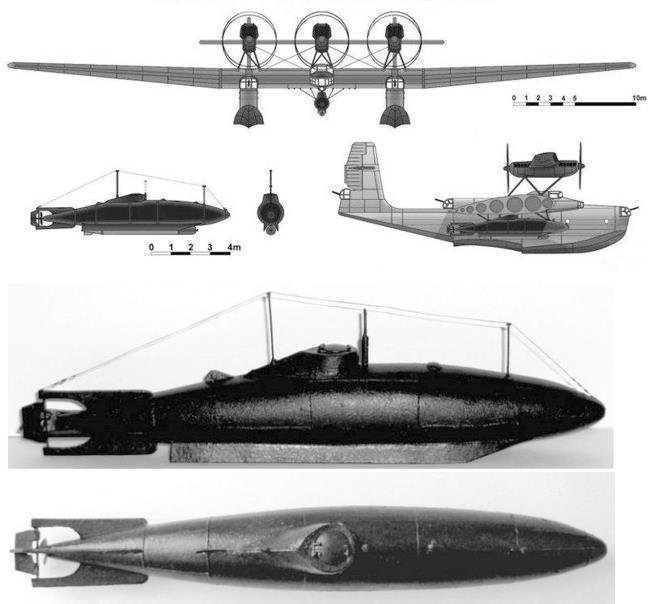
Гидросамолёт АНТ-22 с АПСС
Заводские испытания МК-1 начались 8 августа 1934 г. и продолжились до 8 мая 1935 г. Машину испытывали летчики Т.В. Рябенко и Д.Н. Ильинский. Общая оценка самолёта такова: «Управляемость самолёта при различных комбинациях работы моторов следует признать хорошей». Максимальная скорость у поверхности воды составила 233 км/ч., на высоте 3000 м — 207 км/ч. Практический потолок 3500 м самолёт набирал за 57 мин., время виража составило 82–89 секунд.
После установки на самолёте штатного комплекта оборудования и вооружения он с 27 июля по 15 августа 1935 г. прошел полный цикл государственных испытаний. При наружной подвеске данные несколько снизились: максимальная скорость у поверхности воды составила 205 км/ч., крейсерская — 180 км/ч., практический потолок — 2250 м.
Увы, в середине 1935 г. работы над МК-1 были прекращены, так как во второй половине 1930-х гг. его лётные качества выглядели анахронизмом, и МК-1 мог стать легкой добычей не только истребителя, но и современной «летающей лодки». Кроме того, для обслуживания такого гиганта требовалось большое количество технических средств и наземного персонала. Подготовка к полёту и само его обеспечение оказались слишком сложными и длительными.
В 1935 г., сразу после завершения проектирования АПСС, их строительство поручили Ленинградскому судостроительно-механическому заводу № 196 («Судомех»). Были построены две сверхмалые подводные лодки проекта АПСС, первая в 1935 г. в клепаном, а вторая в 1936 г. — в сварном исполнении. Обе сверхмалые подводные лодки проходили заводские испытания, но на вооружение их не приняли. В официальных отчетах о реализации данного проекта говорится, что «проблема дистанционного управления этой лодкой далека от положительного решения». До испытаний с участием водителей дело вообще не дошло, и перед началом Второй мировой войны сверхмалые подводные лодки АПСС разобрали.
Параллельно работали над ещё одним чудом для поражения Гранд-Флита.
Предположим, злодей подходит на дистанцию огня орудий главного калибра к Кронштадту или Севастополю. Но вот с разных направлений дредноуты атакуют десятки торпедных катеров, которые подходят почти в упор и топят «просвещенных мореплавателей». Пусть большинство катеров потоплено артиллерийским огнем. Но потерь среди красных военморов нет. Катера управляются по радио с эсминцев и самолётов. Такая идиллия не могла не привести в умиление наших военморов, и Бекаури получил новые деньги, новые заводы и десятки катеров для опытов.
Уже в 1924 г. к работе по телеуправлению катеров подключилась группа талантливого изобретатель А.Ф. Шорина, создателя советского звукового кино. Хотя основной принцип — управление с помощью радиоволн — у обоих конструкторов был одинаков, разрабатываемые ими системы отличались одна от другой. Бекаури, стремясь облегчить работу оператора, включил в свой комплекс счетно-решающий прибор, который автоматически вырабатывал курс выхода телеуправляемого катера в атаку. В комплексе Шорина курс рассчитывал по карте оператор. Кроме того, Бекаури размещал станцию управления на корабле, а Шорин — на самолёте, с которого, как он считал, можно раньше обнаружить корабли противника и вывести в атаку на них радиоуправляемые катера.
В 1927 г. в Гребном порту в Ленинграде председателю ВСНХ В.В. Куйбышеву продемонстрировали управление по радио при помощи системы Шорина небольшим катером «Оса». Куйбышев и в последующие годы посещал лабораторию Шорина, интересовался результатами деятельности её коллектива.
Получив заказ от Морских сил, Шорин проделал большую работу по созданию аппаратуры для радиотелеуправления торпедным катером. Для обеспечения испытаний флот передал его лаборатории трофейный английский торпедный катер типа «Торникрофт» и штабной катер «Орлик».
К маю 1930 г. лаборатория создала первый образец радиоаппаратуры для установки на серийном катере типа Ш-4 и самолёте типа ЮГ-1. Место командира-оператора, который должен был управлять торпедным катером по радио, перенесли, таким образом, в воздух. С высоты в несколько тысяч метров, считал А.Ф. Шорин, будет возможно на большом расстоянии обнаруживать корабли противника и выводить на них в атаку радиоуправляемые катера.
Начались полигонные испытания комплекса Шорина. Вначале настройка и проверка аппаратуры велась на катере у стенки завода. Самолёт летал где-то недалеко переменными галсами, с него шли радиокоманды, а инженеры работали с приборами на Ш-4.

Малый торпедный катер Ш-4
Общим в комплексах А.Ф. Шорина и В.И. Бекаури был принцип управления торпедным катером по радио. Но имелись и некоторые отличия. Во-первых, командир-оператор и станция управления у В.И. Бекаури размещались на корабле, а не в воздухе — флот для этого выделил миноносец «Конструктор». Во-вторых, Остехбюро включило в состав станции управления специальный счетно-решающий прибор. Выйти в торпедную атаку не так-то просто. Ведь корабль противника маневрирует, а катеру нужно дать торпедный залп на расстоянии всего лишь около одного километра от цели. Но для этого нужно занять такую позицию торпедного залпа, чтобы цель не успела уклониться от несущихся к ней двух торпед. Для выхода в эту позицию командир катера все время делает необходимые расчеты. В.И. Бекаури решил автоматизировать эти расчеты. В счетно-решающий прибор вводились расстояния и курсовые углы. По ним прибор определял курс и скорость противника и вырабатывал курс выхода торпедного катера в атаку. Оставалось снять с него показания и передать на катер по радио соответствующие команды. Таким образом, в комплексе В.И. Бекаури курс выхода в атаку катера определялся прибором, а в комплексе А.Ф. Шорина его нужно было рассчитывать самому оператору — на карте или планшете. Создание счетно-решающего прибора для того времени было значительным техническим достижением.
К 1937 г. в катера «волнового управления» были обращены торпедные катера Ш-4 и Г-5 — 18 на Балтике и 12 на Чёрном море.
На зачетном флотском учении в октябре 1937 г. отрабатывался бой с эскадрой противника на минно-артиллерийской позиции. Когда соединение, изображающее вражескую эскадру, появилось в западной части Финского залива, более полусотни радиоуправляемых катеров, прорыв дымовые завесы, устремились с трёх сторон на корабли противника и атаковали их торпедами. После учения дивизион радиоуправляемых катеров получил высокую оценку командования.
Первоначально наведение катеров велось с поплавкового бомбардировщика ТБ-1. На самолёте устанавливали аппаратуру управления «Кварц», а на катере — «Вольт-Р». Все работы по монтажу системы телеуправления выполнял завод № 192.
Серийно аппаратуру ставили на итальянских летающих лодках «Савойя С-62бис» (МБР-4). В конце 1930-х гг. «Савойя» были заменены на МБР-2.
Поскольку с дюралевыми торпедными катерами возникали серьезные проблемы, о которых мы поговорим позже, Бекаури ещё в 1928 г. предложил построить более крупные и килевые стальные катера «волнового управления».
Два катера — С-1 (В-1) и С-2 (В-2) — были заложены в 1930 г. на заводе им. Марти в Ленинграде и уже в июле того же года введены в строй. Их включили в состав Балтийского дивизиона особого назначения, который состоял из радиоуправляемых глиссеров.
Водоизмещение С-1 и С-2 составляло 28 т; длина 23,5 м; ширина 3,8 м; осадка 1,4 м. На катерах были установлены импортные бензиновые двигатели суммарной мощностью 2250 л.с., но скорость хода их не превышала 26 узлов. Запас топлива обеспечивал дальность плавания 170 миль. Вооружение состояло из трёхжелобных 450-мм торпедных аппаратов и двух 7,62-мм пулеметов ШВАК. Экипаж — 6 человек. Катера оказались неудобными и в серию не пошли, тем более и сама идея радиоуправляемого катера и его лидера была признана порочной. В годы Великой Отечественной войны катера С-1 и С-2 переоборудовали в малые минные заградители для действий в Финском заливе и на Ладожском озере.
Несмотря на все усилия, систему волнового управления довести до ума к 22 июня 1941 г. так и не удалось. Аппаратура давала много отказов. Наведение на цель самолёта МБР-2 могло вестись только при условиях хорошей видимости. Да и сами тихоходные летающие лодки были хорошей добычей для истребителей противника.
Единственный прок от системы ВУ заключался в том, что о ней пронюхала японская разведка, и сия система произвела большое впечатление на японских генералов и адмиралов, которые были ничуть не меньшими любителями экзотического оружия, чем наши.
С началом Великой Отечественной войны аппаратура ВУ была снята со всех катеров Ш-4 и Г-5, и они стали использоваться как обычные торпедные катера.
Использовать катера ВУ решилось лишь командование Черноморского флота в начале 1943 г. 20 февраля командующий Черноморским флотом вице-адмирал Ф.С. Октябрьский утвердил предложение штаба об атаке судов противника в Камыш-Буруне, а в качестве брандера надлежало использовать торпедный катер типа Г-5. Управлять же им предполагалось с гидросамолёта МБР-2.
22 февраля в 19 ч. 45 мин. торпедный катер ТКА-61 (он же ВУ-61) в сопровождении двух катеров Г-5 — № 13 и № 9 — вышли из Геленджика и взяли курс на Камыш-Бурун. Но в 5 ч. 10 мин. 23 февраля они вернулись в базу. Операция была сорвана, так как самолёт наведения в 1 час 05 мин. разбился в районе сухопутного аэродрома у Геленджика, весь экипаж, включая оператора наведения, погиб.
В следующий раз командование Черноморского флота попыталось использовать катер ВУ лишь в июле 1943 г. Тот же ВУ-61 вновь было решено использовать в качестве брандера для удара по порту Анапа. 21 июля в 21 ч. 33 мин. из Геленджика вышли катер ВУ и торпедные катера № 12 и № 81. В полночь в воздух поднялся самолёт управления МБР-2, а, кроме того, 6 — МБР-2 из состава 119-го авиаотряда. Они должны были бомбить Анапу, а также отвлекать внимание немцев.
В 1 час ночи самолёт управления прибыл в условленную точку встречи с катерами. На случай потери управления, чтобы секретное оружие не попало в руки немцам, на катере был заведен часовой механизм самоликвидатора и установлено время взрыва — через 1 ч. 15 мин. Затем ТКА-81 снял с ВУ-61 команду и вместе с ТКА-12 лег на циркуляцию вправо, тем самым дав знак летчикам, что они могут принимать управление, и МБР-2 повел ВУ-61 к Анапе. Вел катер оператор капитан-лейтенант Саблин. ВУ-61 переменным ходом от 28 до 37 узлов шел к Анапе. В 1 ч. 49 мин. германская артиллерия открыла огонь по катеру. Тогда на нем с самолёта включили бортовые огни и прожектор, с помощью которого начали сигналить что-то неопределенное. Немцы прекратили обстрел катера, и он на полном ходу рванулся к цели. Но в 1 ч. 53 мин. всего в 300–400 м от головы анапского мола ВУ-61 с чем-то столкнулся и взорвался без команды с самолёта.
Последний раз командование Черноморского флота решило применить катера ВУ в начале декабря 1943 г. против порта Камыш-Бурун. Этот порт использовали в качестве промежуточной базы германские большие десантные баржи, которые контролировали район Керченского пролива.

