Скелетные мышцы можно разделить на два типа:
1. Стабилизирующие мышцы фактически стабилизируют сустав. Они состоят из медленно сокращающихся волокон для обеспечения выносливости, а также способствуют удержанию положения. В свою очередь, их можно подразделить на первичные стабилизирующие мышцы, которые характеризуются очень глубокими креплениями и располагаются вблизи оси вращения сустава, и вторичные стабилизирующие мышцы, которые представляют собой очень сильные мышцы, способные поглощать большое количество силы. Стабилизирующие мышцы противодействуют силе тяжести и часто с течением времени становятся слабее и длиннее (Norris, 1998). В качестве примера можно привести многораздельную мышцу, поперечную мышцу живота (первичные), а также большую ягодичную мышцу и большую приводящую мышцу (вторичные).
2. Мобилизирующие мышцы (см. примеч. 2) отвечают за движение. Они считаются более поверхностными и менее сильными по сравнению со стабилизирующими мышцами, но при этом обеспечивают более широкую амплитуду движения. Как правило, они пересекают два сустава и состоят из быстросокращающихся волокон, которые отличаются силой, но лишены выносливости. Мобилизирующие мышцы способствуют быстрому, или баллистическому, движению и развивают высокую силу. С течением времени и по мере их использования они, как правило, твердеют и укорачиваются. В качестве примера можно привести подколенное сухожилие, грушевидную мышцу и ромбовидные мышцы.
Основная функция мышцы – ее укорачивание. Когда места прикрепления мышцы сближаются, это называется концентрическим сокращением. Поскольку происходит движение сустава, концентрические сокращения также можно считать динамическими. В качестве примера приведем удерживание предмета: при выполнении данного действия двуглавая мышца плеча сокращается концентрически, локтевой сустав сгибается, а рука поднимается вверх к плечу.
Движение считается эксцентрическим сокращением, если мышца может прилагать силу во время удлинения. Как и в случае с концентрическим сокращением, в результате движения сустава такое сокращение также можно считать динамическим. Филаменты актина все больше отдаляются от центра саркомера, эффективно его растягивая.
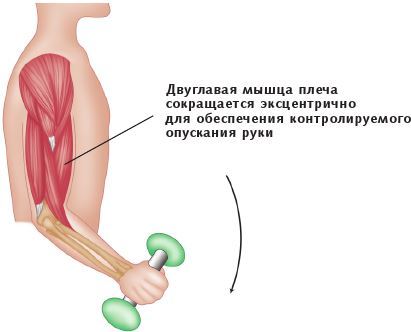
Рис. 1.9. Пример эксцентрического сокращения – движение двуглавой мышцы плеча, когда локоть выпрямляется, чтобы опустить тяжелый предмет. В данном случае двуглавая мышца плеча контролирует движение путем постепенного удлинения, чтобы противостоять силе притяжения
Когда мышца действует без движения, генерируется сила, но длина мышцы остается неизменной. Этот механизм называют статическим (изометрическим) сокращением.
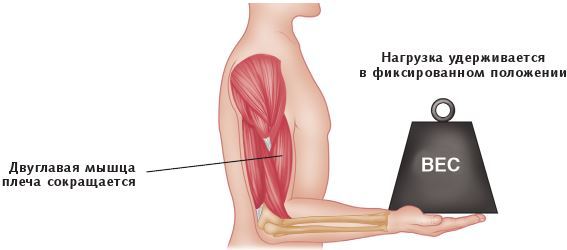
Рис. 1.10. Пример статического (изометрического) сокращения, когда удерживается большой вес, при этом локоть находится в фиксированном положении и согнут под углом в 90°
Рычаги
Рычаг представляет собой механизм для передачи (но не создания) силы, он состоит из жесткого стержня, который двигается вокруг неподвижной точки (центра вращения). Если быть точнее, рычаг включает импульс силы, силу сопротивления, жесткий стержень и центр вращения. Кости, суставы и мышцы в совокупности формируют систему рычагов, причем суставы выступают в качестве центра вращения, мышцы прилагают усилие, кости несут массу той части тела, которую необходимо переместить. Рычаги можно классифицировать в зависимости от положения центра вращения, сопротивления (нагрузки), а также усилия относительно друг друга.
В рычаге первого класса усилие и сопротивление расположены на противоположных сторонах центра вращения. В рычаге второго класса усилие и сопротивление находятся с одной стороны центра вращения, а сопротивление – между центром вращения и усилием. Наконец, в рычаге третьего класса усилие и сопротивление размещены с одной стороны центра вращения, но усилие действует между центром вращения и сопротивлением – это самый распространенный тип рычага в человеческом теле.
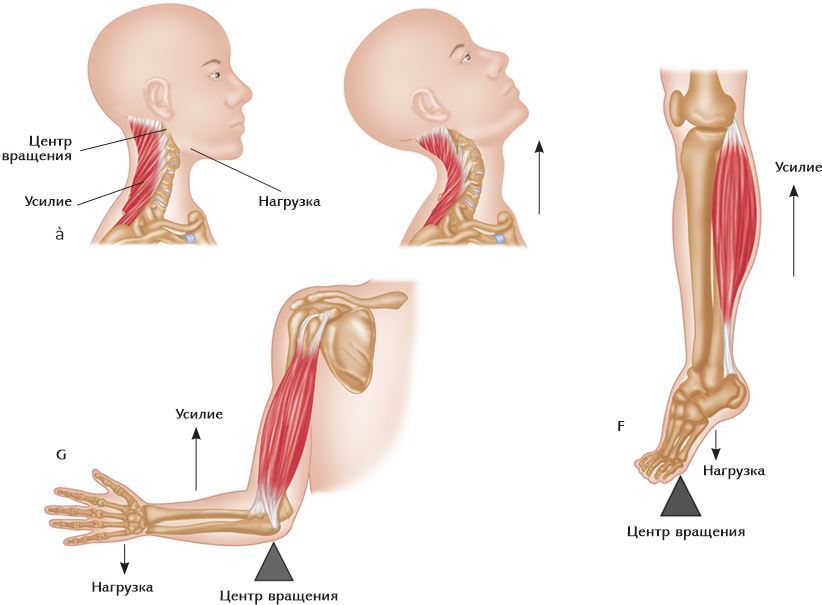
Рис. 1.11. Примеры рычагов в человеческом теле: a – рычаг первого класса; b – рычаг второго класса; c – рычаг третьего класса
Создание силы
Крепость скелетной мышцы отражается в ее способности генерировать силу. Если тяжелоатлет способен поднять 75 кг, мышцы должны производить достаточное количество силы для того, чтобы он мог сделать это. Даже если вы не пытаетесь поднять вес, мышцы все равно должны производить достаточно силы, чтобы двигать кости, к которым они крепятся. Генерирование силы зависит от ряда факторов, включая количество и тип активированных моторных единиц, размер мышцы, а также угол, под которым располагается сустав.
Взаимное (реципрокное) торможение
Большинство движений предполагает совместное усилие двух и более мышц, причем одна из мышц обязательно должна выступать в качестве первичной движущей силы. Многие первичные движущие мышцы, как правило, берут «в помощники» мышцу-синергиста. Кроме того, у большого числа скелетных мышц имеется одна или даже больше мышц-антагонистов, которые выполняют противоположное действие. Хорошим примером может послужить абдукция бедра, при которой средняя ягодичная мышца выступает в качестве первичной движущей силы, напрягатель широкой фасции бедра действует синергетически, а приводящие мышцы бедра функционируют как антагонисты, при этом происходит их реципрокное торможение (РТ) под действием агонистов.
Реципрокное торможение – это физиологический феномен, предполагающий автоматическое ингибирование мышцы при сокращении ее антагониста. В определенных обстоятельствах агонисты и антагонисты могут сокращаться одновременно – такой феномен известен как координация сокращения.
Теперь, когда вы имеете общее представление о гибкости, мышцах и мышечной механике, можно переходить к определению стретчинга. Поскольку стретчинг связан с физическим здоровьем и хорошей физической формой, он представляет собой способность определенных частей тела принимать такие положения, в которых мышцы и связанные с ними мягкие ткани удлиняются.

