II. Элементарные понятия о биомеханике человеческого тела
1. Об общих свойствах рычага в биомеханике человеческого тела
Отдел, изучающий устройство и деятельность органов движения, носит название биомеханики (bios — жизнь, mechana — машина, орудие).
Биомеханика есть частный случай механики, разработанной применительно к человеческому телу. С точки зрения биомеханики, человеческое тело представляет целую цепь подвижных звеньев, подчиненных основным законам механики. Действие мышечного аппарата, подчиненного нашей воле, или действие внешних сил на данный аппарат всегда зависит не только от собственных механических свойств всей вышеуказанной цепи, но и от их взаимоотношений, порядка и числа их соединений, характера и строения сочленений (какой сустав и т. д.), обусловливающих род и степень их подвижности.
Мышцы, костный аппарат, с точки зрения биомеханики, выполняют своеобразные действия, которые проявляются в виде перемещения, сокращения, разгибания, расслабления волокон и возникают под влиянием сложных физиологических процессов, происходимых в человеческом теле. Одним из законов физической механики, как известно, является рычаг. Знание этого закона необходимо и для «Самбо» в целях правильного понимания взаимодействия костей, мышц, из которых первые играют роль рычагов, а последние — роль сил, действующих на эти рычаги.
«Рычаги» и «силы» в человеческом организме имеют, однако, свои особые свойства, отличные от «рычагов» и «сил», изучаемых в механике.
Механика определяет рычаг, как «твердый не растяжимый стержень, опирающийся на неподвижную точку». Рычаг имеет концы, называемые плечами, и точку опоры.
Всякий рычаг может быть подвержен действию многих сил. Но сколько бы сил ни было, они всегда сведутся к двум. Поэтому, когда идет разговор о равновесии рычага, тогда имеют в виду две силы, действующие в точке опоры противоположно друг другу и уничтожающиеся взаимным сопротивлением.
Если это равенство уничтожено, т. е. нарушено равновесие одной силы за счет другой, но сохраняется точка опоры, то мы получаем новое движение, вращение, где большая сила, приложенная к одной из точек — плечей рычага (точка называется — точкой приложения сил) произведет данное вращение. Из двух сил, действующих на рычаг, одна называется действующей силой, другая — противодействующей. Основной смысл применения рычага в человеческом теле заключается в возможности использования одной силы в ущерб другой. Из этого положения можно сделать много частных выводов. При расчете движений человеческого тела на общих законах биомеханики принято понятие о «моменте силы». Момент силы по отношению к рычагу определяется, как произведение силы в килограммометрах на плечо рычага (его длину), так как силы находятся на одной плоскости, будучи тождественны своим проекциям.
Проф. Воробьев в своем учебнике об анатомии человека приводит следующие вычисления по данному вопросу.
На рис. № 402 исследовано: «Пусть F1 — две силы, действующих на рычаг АВ системы, помещенной в плоскости рисунка № 402.
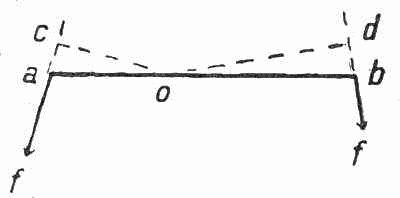
Рис. 402.
Силы проэцируются в виде линий FA и F1В. При оси, проходящей через точку О, расстояние данных сил от оси рычага измеряется перпендикулярами ОС и OD. Следовательно, момент силы F будет F.O.C. момент силы F1—FOD. Отсюда вытекает, что в случае действия рычага момент силы есть произведение самой силы на длину прилежащего ей плеча рычага (плечами рычага называются перпендикуляры ОС и OD, опущенные из точки опоры на направление сил F и F1»).
В результате вычислений получается, что действующие на данный рычаг силы обратно пропорционально прилежащи им плечам рычага. В случае состояния равновесия и неравенства плеч рычага— большой силе прилежит малое плечо рычага и обратно, большому плечу — соответственно малая сила. Например: в процессе проделывания приема «рычаг вверх на ладони», рука представляет рычаг АВ, где точка О (точка опоры) находится как раз в локтевом суставе, куда поставлена ладонь руки делающего прием, сила F находится у плеча обороняющегося (вес тела), а сила F1 приложена нападающим к кисти обороняющегося. Поэтому образованные плечи рычага АО и ОВ будут до тех пор в равновесии, а значит и не будут причинять боль в локтевом суставе, пока сила F будет равна силе F1. Как только нападающий в точке приложения сил В увеличит силу, равновесие плечей рычагов нарушится, обороняющийся получает сильную боль в суставе. Количество силы в приложении ее к точке В будет меньше, чем в точке А (вес тела), разница длины плеч рычагов АО и ОВ и сохраняет равновесие.
Величина одной и той же силы (напряжение) меняется не только в связи с длиной плеча ее рычага, но и в зависимости от угла приложения силы (напряжения) к данному рычагу. При этом могут быть три различных случая.
1) Сила образует прямой угол со своими плечами рычага, где она действует с большим напряжением, так как плечо рычага оказывается наиболее длинным. Например, в приеме «рычаг вверх на ладони».
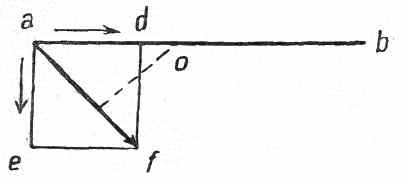
Рис. 403.
2) Сила образует острый угол со своим плечом рычага. Так, если сила F (рис. 403) действует на рычаг АОВ, то при действии ее в перпендикулярном к рычагу направлении плечо ее рычага было бы АО, но АО > О,с, так как АО наклонна к А, в то время как ОС (плечо рычага силы F) перпендикулярно к ней. Поэтому известная часть силы, потребная на отталкивание неподвижной точки, теряется для движения точки А. Это становится очевидным, если силу F разложить на две силы: АЕ и АД, действующие на точку А по указаниям стрелкой направлениям. AD — количество силы, идущее на отталкивание неподвижной точки (из книги «Краткий учебник анатомии человека» проф. Воробьева).
Из этого видно, что при уменьшении угла, образуемого силой с плечом рычага, величина AD возрастает за счет величины АЕ; тем меньше в этом случае утилизируются силы для движения. Эта сила превращается в О в случае установки силы F параллельно своему рычагу.
3) Сила образует с рычагом тупой угол (рис. № 404). На этом рисунке видно, что здесь плечо рычага короче, чем в вышеописанном случае, когда F была бы перпендикулярна BOA, потому что тогда сама ОА была бы плечом и известная часть силы F теряется на притягивание точки А в направлении AD, т. е. в ущерб движению. Чем тупее угол наклонения F, тем больше становится сила, составляющая AD за счет АЕ единственно тогда полезной для движения, параллельность F с плечом рычага имела бы последствием, как и в предыдущем случае, исчезновение составляющей АЕ и в результате — невозможность движения. Из всего сказанного для читателя будет понятно, что как только сила действует перпендикулярно к плечу своего рычага, то большая или меньшая часть ее расходуется на притягивание или на отталкивание рычага от точки его опоры, соответственно углу, образуемому действующими плечом и силой. Поэтому при выполнении того или иного приема такое положение нам выгодно, если мы своей силой будем действовать перпендикулярно силе противника, ясно, что результата не будет, ибо при этом, как видно из вышеизложенного, сила противника будет больше всех работоспособна при прямом угле. Другое дело, если мы будем в приемах всякое сгибание, разгибание, вращение, сжатие и на отжатие делать под углом (и лучше, как видно выше, под острым углом), то результаты скажутся сразу.
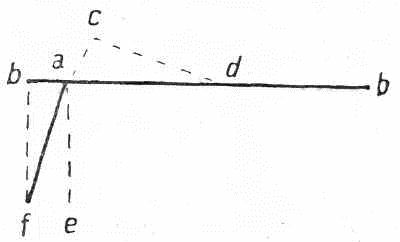
Рис. 404.
Из всего сказанного понятно, что если мыслить кости как рычаг, а мышцы как силу, то механизм движения будет слагаться из следующих моментов: 1) точка опоры, 2) точка приложения действующей силы и 3) точка преодолеваемого сопротивления.
Центром движения и одновременно точкой опоры кости служит ее сустав (подвижное соединение) с другой более подвижной относительно первой кости. Действующая сила — мышца — прилагается в точке ее прикрепления: сопротивление может находиться на разных концах рычага.
От комбинации расположения этих трех точек необходимо различать рычаги трех родов.
Рычаг первого рода (рис. № 405).
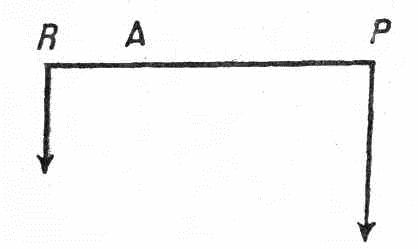
Рис. 405.
В рычаге первого рода неподвижная точка А находится между двумя другими подвижными — Р и R (R — преодолеваемый мышцей вес, тяжесть или давление во время проделывания приема, а Р — действующая на рычаг мышечная сила). Известное число мышц тела действует, как сила, приложенная к рычагу этого рода, например, при разгибании головы, разгибании локтевого и тазобедренного суставов; в последних случаях плечами действующей силы могут быть, смотря по обстоятельствам, локтевой отросток, вертлуг бедра.
Рычаг первого рода в человеческом организме почти всегда присутствует при разгибании.
Все приемы «Самбо» из группы «рычагов», т. е. все рычаги вверх, являются основанными на рычаге первого рода.
Рычаг второго рода.
В рычаге второго рода (рис. № 406) сопротивление R занимает промежуточное положение между точкой опоры А и приложением сил Р.
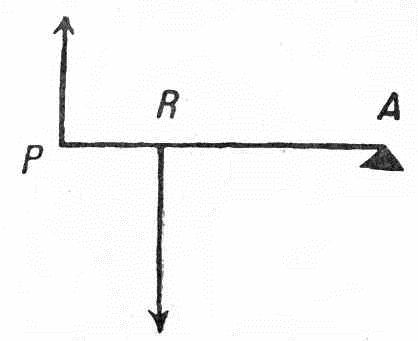
Рис. 406.
P—Мышцы тела плечевого сустава; R—Сила, давящая на локтевой сустав сверху (предплечье делающего прием); А—Упор в руку делающего прием. (захват за кисть нападающего).
В этом случае независимо от относительного взаиморасположения указанных трех точек, плечо рычага, прилежащее к действующей на плечо силе Р, всегда больше плеча сопротивления, т. е. АР > AR, этот рычаг еще обыкновенно зовут рычагом силы. Он невыгоден для человека в естественных движениях в смысле скорости движения, но он выгоден, когда на такой руке можно хорошо провести прием, так как у противника плечо рычага ближе к сопротивлению, меньше длины всего рычага.
Примером рычага этого рода служат кости бедра и колени при поднятии тела на носки и опоре стопы на головке плюсневых костей.
Когда конечность не служит для опоры, кости ее являются уже рычагами первого рода. Те же самые рычаги с теми же мышцами, в зависимости от потребности данного момента, могут быть применены то для развития силы, то для достижения скорости. Эта возможность обратимости составляет существенное отличие рычагов животного типа от рычагов механических. Все приемы «Самбо» групп «рычаги вниз» относятся к рычагам второго рода.
Рычаги третьего рода (рис. 407).
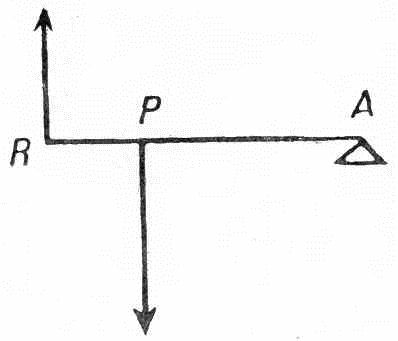
Рис. 407.
К рычагам третьего рода относится такой случай расположения указанных трех точек, когда действующая сила Р помещается между сопротивлением R и точкой опоры А.
В этом случае плечо сопротивления AR предполагается всегда длиннее плеча действующей силы, что благоприятствует развитию скорости точки R в ущерб к приложенной силе. Этот рычаг еще называют «рычагом скорости». Все сгибательные мышцы действуют в условиях такого рычага. Поэтому ряд приемов построен по принципу сгибания, например, вся группа «дожимов».
Но независимо от рычагов, описанных выше, мы можем наблюдать быстрое перемещение и порядка рычагов всех видов, потому что ни одна из частей двигательного аппарата не фиксирована в статике неподвижно, а все мышцы в той или иной мере участвуют в движении, сопротивлении и т. д. Сама опорная точка, которую мы только для данного и определенного движения считаем опорной, не является неподвижной, поэтому места приложения сил также не вполне постоянны и не связаны с одним каким-либо пунктом кости. Такое явление мы можем наблюдать в приемах, где имеется положение винта (скручивание). Кроме того, для лучшего усвоения приемов «Самбо» нужно учесть один очень важный и основной принцип биомеханики, что при сокращении мышц разгибатели развивают максимум силы (напряжение) в начале своего сокращения, в то же время как сгибатели — в конце. Это значит, что против «разгибателей» руки прием применяется быстрее, чем при работе против сгибателей рук, ног и т. д.
Поэтому быстрота в проделывании приема в данном случае играет решающую роль.
2. Общие замечания о плоскостях, осях, суставах в человеческом теле
Человеческое тело движется в разнообразных направлениях. Само движение подчинено основным правилам. Они выражены в изучении условно обозначенных осей и плоскостей движения человеческого тела.
Эти плоскости имеют три направления: а) горизонтальное, б) фронтальное, в) сагитальное (см. рис. № 408 — схема осей и плоскостей в теле человека — по проф. В. Воробьеву).
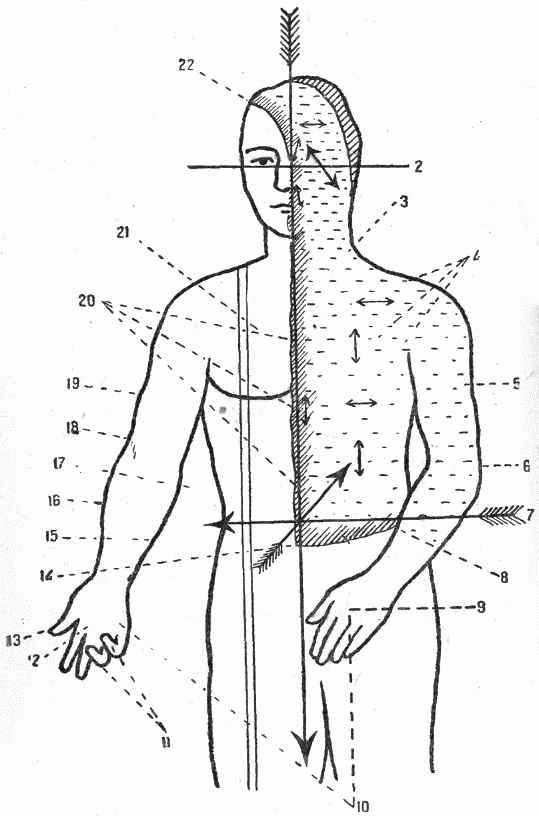
Рис. 408. Схема осей и плоскостей в теле человека (по проф. В. Воробьеву).
1. Вертикальная ось.
2. Поперечная ось.
3. Фронтальная плоскость (одна из фронтальных).
4. Линии, лежащие во фронтальной плоскости: горизонтальные и вертикальные.
5. Плечо, приведенное к туловищу (приведение плеча).
6. Левая рука согнута в локте предплечья.
7. Поперечная ось.
8. Поперечная плоскость (одна из горизонтальных).
9. Кисть в положении пронации; большой палец обращен к туловищу (ладонь кисти смотрит вниз).
10. Перемещение положения из пронации к супинации есть пример вращения кисти.
11. IV—V пальцы согнуты (сгибание пальцев).
12. Кисть в положении супинации; большой палец обращен кнаружи от туловища (ладонь кисти смотрит вверх).
13. Большой палец отведен (отведение пальца).
14. Сагитальная ось.
15. Медиальный внутренний край.
16. Латеральный наружный край.
17. Поперечная ось, одна из горизонтальных, лежащая во фронтальной плоскости.
18. Правая рука разогнута в локте (предплечья).
19. Вся рука отведена от туловища (отведение руки).
20. Линии, лежащие в сагитальной плоскости; горизонтальные к вертикальные.
21. Латеральная (наружная) плоскость по отношению к медиальной (одна из сагитальных).
22. Серединная плоскость, средняя плоскость, плоскость симметрии (одна из сагитальных).
а) Что такое горизонтальная плоскость?
Плоскость, проходящая через левую и правую стороны живота. Плоскость, укладывающаяся с линией горизонта. Горизонтальная плоскость мысленно рассекает тело в положении стоя параллельно земле на бесчисленные части.
Тело в этой плоскости может двигаться вперед, назад (кульбит вперед на руки и т. д. — см. рис. № 408).
б) Что такое фронтальная плоскость?
Вращение тела вокруг продольной оси, вокруг оси фронтальной плоскости. Эта плоскость проходит через левое и правое ухо и левую и правую половину живота. Движение в фронтальной плоскости обычно бывает при рывках тела в сторону, вращение тела при ходьбе (начало вывода из равновесия и т. д. — см. рис. № 408).
в) Что такое сагитальная плоскость?
Сагитальная плоскость проходит через переднюю и заднюю стенки туловища в направлении: кончика носа, пупка, лобка, к средней линии спины, делящей туловище пополам. В этой плоскости бывает движение характера «рывка, толчка в обратную сторону», кроме того, при сагитальном смещении частей тела во время проделывания приемов (см. рис. № 408).
Все вышеуказанные плоскости взаимно перпендикулярны, а поэтому движения могут переходить из одной плоскости в другую.
Линии, указывающие направления — вертикальная, поперечная и сагитальная, являются одновременно осями этих плоскостей, вокруг которых происходят соответствующие движения.
Вокруг вертикальной оси, проходящей через туловище (например, от макушки до ягодиц), туловище вращается в правую и левую стороны. Конечности вокруг оси, проходящей по их длиннику, могут поворачиваться кнаружи или внутри.
Вокруг горизонтальной оси тело может делать предклон, заклон, преднос.
Вокруг сагитальной оси тело делает уклон вправо и влево.
Всякое вращение части тела всегда основывается на какой-либо оси.
Чтобы точно понимать — что такое оси движения, мы должны прежде всего знать, какие существуют суставы.
К ним относятся:
1. Одноосные суставы.
2. Двуосные суставы.
3. Многоосные суставы.
4. Полуподвижные суставы.
1. Что такое одноосный сустав?
В одноосных суставах движения совершаются вокруг одной оси, причем форма сустава всегда цилиндрическая, так как цилиндр имеет одну основную ось и в зависимости от расположения сустава последние бывают с поперечной и продольными осями.
а) Суставы с поперечной осью (см. рис. № 409 АВ).
Ось вращения в данном суставе располагается поперечно к длине оси сочленяющихся костей, например: ось АВ локтевого сустава. По данной оси происходит нормальное движение вышеобозначенных суставов.
б) Суставы с продольной осью (рис. № 409).
Эти суставы в большинстве носят название вращательных, ибо ось движения расположена вдоль длины костей и совпадает с продольной осью кости. Примером может служить сочленение — сустав между локтевой и плечевой костями в предплечье. Ось этого сустава обозначена на рис. № 409 буквами fc, вокруг которой и происходит вращение предплечья вовнутрь и кнаружи.
2. Что такое двуосный сустав?
Двуосными суставами называются такие суставы, которые имеют две главные оси, несмотря на то, что кроме движений по этим двум осям возможны второстепенные движения по осям, расположенным в сфере этих двух главных осей. По своей форме построения суставы, имеющие две главные оси, делятся на элипсоидные (яйцевидные) и седловидные.
а) Эллипсоидный (яйцевидный) сустав по форме похож на эллипсоид (яйцо). В суставе таком возможны сгибание и разгибание, приведение и отведение, а также смещение суставных поверхностей в отношении друг к другу, кроме того, путем комбинаций возможны вращения вокруг опорной точки. Типичным представителем таких суставом является лучезапястный сустав (см. рис. № 409 cd).
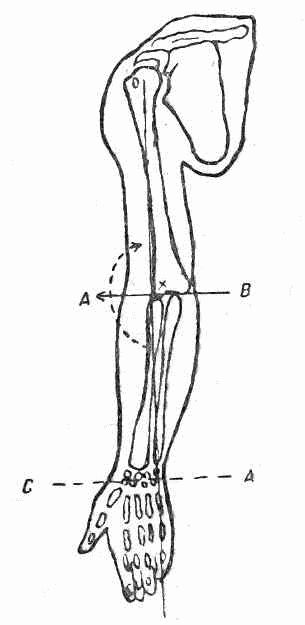
Рис. 409. Оси верхней конечности.
б) Седловидный сустав образован сферической поверхностью, которая вогнута в одном направлении и выпукла в другом, перпендикулярны к первому, напоминая собой седло с передней и задней лукой. Соответственно такая же другая поверхность выпуклая в обратном отношении, что обусловливает собой возможность смещения одной кости по отношению к другой, главным образом, в двух взаимно перпендикулярных направлениях, хотя здесь также возможно, при комбинации движений, вращение вокруг опорной точки. Примером может служить пястно-запястный сустав большого пальца с возможными в нем движениями — проведение и отведение этого пальца.
3. Что называется многоосным суставом?
К данному виду суставов относятся суставы, имеющие форму шара, т. е. такую форму, при которой возможно большее количество осей движений. Но в сочленениях многоосных суставов бывает двоякого характера различия, это — шаровидный и ореховидный суставы. Шаровидный сустав имеет ямку сочленения, куда вставляется сустав соответствующего ему 1/3 всей поверхности, тогда как суставная поверхность ямки ореховидного сустава глубока, да еще при посредстве добавочной суставной сумки охватывает головку больше, чем наполовину.
Поэтому такое расположение суставных ямок многоосных суставов дает особый характер движений. Ясно, что чем глубже сустав сидит в суставной ямке, тем больше ограничений движений в этом суставе, этим отличается ореховидный сустав. В данных суставах, как и геометрической фигуре, шар имеет три главных оси: вертикальную, поперечную и сагитальную оси, идущие спереди назад через сустав. Примером шаровидного сустава является плечевой сустав. Примером ореховидного сустава — тазобедренный (рис. № 410).
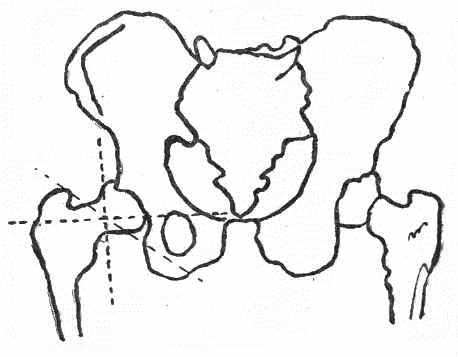
Рис. 410. Скелет нижней конечности.
4. Что такое полуподвижный сустав?
Суставы характера полуподвижного называются амфиартрозами я выделяются в особую группу по признаку их малой подвижности. Они образуются плоскими суставными поверхностями почти равного протяжения, укреплены крепкими, короткими связками, а потому движение в данных суставах очень ограничено. Примером такого сустава может служить сустав между костями запястья (кроме первого пальца).

