Телесный интеллект
Это очевидно настолько, что часто забывается: мы не бестелесные умы. Существуют веские основания полагать, что наш интеллект связан с тем, как мы чувствуем и взаимодействуем с миром. Вот почему некоторые исследователи ИИ постоянно настаивали на том, что разумным машинам нужны тела.
В январе 2011 года Макс Версаче и Хизер Эймс заботились о двух новорожденных: сыне Габриэле и виртуальной крысе по имени Animat. При рождении мозг Габриэля, как и всех детей, позволял ему выполнять только простейшие движения: хватать, сосать и видеть нечеткие изображения своих родителей. Все остальное зависело от самого ребенка.
Animat также не отличался явной запрограммированностью. Но взаимодействие с виртуальным миром вскоре научило его различать цвета и определять окружающее пространство. Версаче и Эймс из Бостонского университета надеются, что их подход доведет машинный интеллект до той стадии, в которой роботы научатся мыслить более человечно.
Вера в правильность данного подхода для развития ИИ уходит корнями в десятилетия назад. В 1980-е годы Родни Брукс из Массачусетского технологического института утверждал, что работа над ИИ велась «задом наперед». Ученые пытались запрограммировать сложные способности, хотя не знали даже, как создать элементарный интеллект, способный не врезаться в стены. По его словам, нам следовало подражать природе – она наделяет нас чувствами, позволяющими самостоятельно выживать в мире без заданного сценария.
Идея Брукса сработала. В 1989 году он создал Genghis – шестиногого робота-насекомого, способного передвигаться без центральной системы управления. Его датчики в режиме реального времени реагировали на сигналы, получаемые от взаимодействия с окружающей средой. Например, при хождении входные усилия робота менялись. Эти изменения, в свою очередь, управляли его дальнейшими движениями и помогали преодолевать препятствия, которые не были четко запрограммированы в системе.
В течение следующего десятилетия исследования в области нейробиологии, когнитивистики и философии показали, что идеи Брукса нашли более широкое применение. В конце 1990-х годов Джордж Лакофф, ученый-когнитивист из Калифорнийского университета в Беркли, предположил, что человеческий интеллект неразрывно связан с тем, как именно наши чувства и тела взаимодействуют с окружающей средой. По словам Лакоффа и его единомышленников, наш «телесный интеллект» объясняет не только элементарную разумность (например, как мы учимся визуальному распознаванию объектов), но даже более сложное, абстрактное мышление. Здесь, наконец, и был сокрыт ключ к созданию сложного человекоподобного интеллекта.
Существовала лишь одна проблема: сложность с модернизацией телесного ИИ. Улучшение корпуса робота, напичканного различными сенсорами, требует не только программирования дополнительных функций, но и кропотливой сборки-разборки самих сенсоров.
Несмотря на все эти сложности, многие исследователи находят данную идею чрезвычайно привлекательной и не готовы от нее отказаться. В 2009 году Оуэн Холланд из Сассекского университета в Брайтоне создал человекоподобного робота Eccerobot, смоделированного по принципам, которые лежали в основе Genghis. Однако Eccerobot не демонстрировал никаких признаков разумности. Поэтому, несмотря на то, что возрастающая вычислительная мощность и подход, основанный на больших данных, смогли «модернизировать» традиционную модель ИИ, развитие телесного ИИ происходит все еще медленно.
Со временем Версаче, Эймс и их команда стали приходить к выводу о том, что у теории телесности все еще есть шанс, если мы сможем забыть о физическом теле. Благодаря новым мощным видеокартам дизайнеры видеоигр могут имитировать все что угодно, включая тело робота, среду, в которой он живет, и даже сложную физику, лежащую в основе взаимодействия робота и окружающей среды.
Команда ухватилась за эти новшества с целью «обойти» фактическую телесность. Вместо того, чтобы трудиться над созданием реального тела, ученые разработали его виртуальный аналог, синтетические датчики которого могли взаимодействовать с подробно визуализированной виртуальной средой. Так, по их мнению, можно было пользоваться всеми плюсами телесного ИИ без сопутствующих недостатков. При успешном результате ученые смогли бы быстро перейти к развитию телесного интеллекта.
Интеллект животных
Animat появился на свет в тот день, когда команда Версаче подключила мозг робота, состоящий из сотен нейронных моделей, наделив его, среди прочего, цветовым зрением, моторными функциями, тревожностью и т. д., которые являлись точной имитацией биологических моделей. Это означало, что у робота отсутствовал запрограммированный список явных команд. Точно так же, например, мозг Габриэля не мог просчитать размеры кроватки, чтобы определить, оттуда лучше потянуться за игрушкой. Как и Genghis, Animat в процессе своего обучения и передвижения зависел от обратной связи, которую получал от виртуального тела, снабженного сенсорами. Данные сенсоры были схожи с теми, что находятся в сетчатке и на коже. Но в отличие от Genghis, любую часть Animat можно было усовершенствовать в мгновение ока.
Окружающая среда робота подчинялась законам физики реального мира, включая гравитацию, благодаря чему Animat получал реалистичную сенсорную информацию. К примеру, свет попадает на виртуальную сетчатку Animat, отвечающую за цветное зрение. А правильно откалиброванная сила (вода и давление воздуха) воздействует на его искусственную кожу. Различные комбинации входящих значений стимулируют реакции Animat.
Виртуальный мир Animat – это гигантский голубой бассейн, окруженный множеством шестов различных цветов (см. рис. 2.2). Animat, как и настоящие крысы, ненавидит воду. Этому способствует ощущение тревожности, которое исследователи заложили в нейронные модели робота. Единственный способ избежать воды – это найти небольшой «островок», спрятанный где-то под поверхностью воды. Проверка разумности Animat сводится к тому, как быстро он научится отыскивать безопасные платформы для облегчения тревожности. Первый эксперимент оказался провальным: Animat целый час суматошно проплавал без каких-либо четких шаблонов. Затем исследователи сдались и завершили испытание. При повторном погружении Animat в воду шаблон плавания изменился. На этот раз после 45 минут плавания по новой схеме Animat смог обнаружить платформу. При выходе из воды уровень тревожности робота резко снизился, что лишь укрепило цепочку связей, приведших к достижению цели. Теперь Animat знал цвета шестов рядом с платформой и примерный путь, по которому до нее можно добраться.
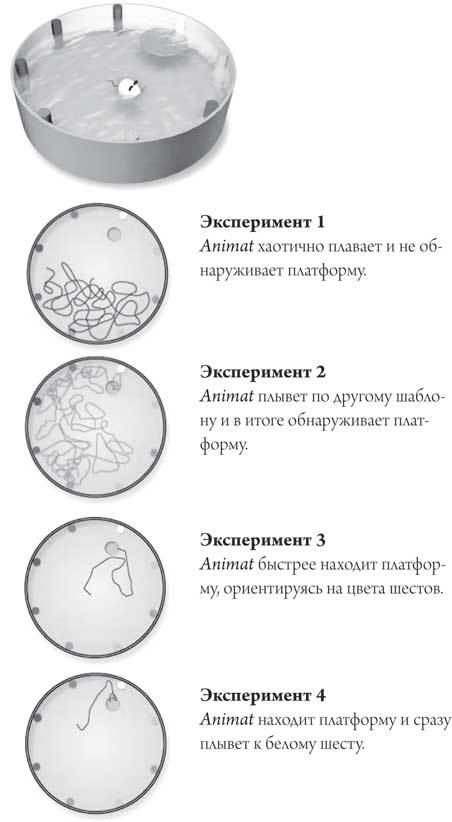
Рис. 2.2. Виртуальный Animat запрограммирован так, что обладает реальным цветовым зрением крысы, ее навигационными способностями и ненавистью к воде. Единственный способ выйти из воды – найти скрытую платформу у белого шеста
В третий раз, когда Animat бросили в воду, он потратил куда меньше времени на обнаружение платформы – теперь робот искал шесты правильного цвета. На четвертой попытке Animat без колебаний поплыл прямо к платформе.
Несмотря на многообещающие результаты ранних экспериментов, виртуальный мир является лишь тренировочным пространством. Настоящее тестирование наступит в тот момент, когда мозг, натренированный в виртуальной оболочке, будет пересажен в настоящее тело. Ведь, в конце концов, самоцелью исследований является робот, который сможет самостоятельно передвигаться в реальном мире.
Марсианская крыса
Возможности машинного интеллекта объясняют скорый визит NASA. Марсоход с биологическим интеллектом смог бы использовать свои нейронные сети для зрения, равновесия, обхода препятствий на местности и избавления от необходимости в постоянном контроле со стороны человека. Так что команда исследователей подготовила для Animat виртуальный Марс, дополненный кратерами.
Поскольку по задумке Animat обучался так же, как и его биологические сородичи, возник ряд закономерных вопросов, например: может ли Animat чувствовать боль? Ведь, в конце концов, Animat начинает с отрицательного подкрепления в качестве сильного беспокойства, а затем, по достижении скрытой платформы, получает положительную награду в форме мгновенного облегчения.
Ни Версаче, ни Эймс не верили, что Animat способен к самосознанию, и все же робот был не так глуп, как кажется. Чувства могли стать тем самым связующим звеном между разумом и самосознанием. Некоторые ученые-когнитивисты были уверены, что развитию самосознания у людей способствовали основные механизмы подкрепления: беспокойство и облегчение. «Чувство» самосознания (внутреннее переживание ярости или ощущение боли) порождается не более высоким уровнем познания, а простым взаимодействием с миром.

