Плантоид: пример технологии, вдохновленной биологией растений
Как мы уже убедились, причины, по которым конструкторы берут растения в качестве образца при создании робототехники, многочисленны и весомы. Я убежден в этом, поэтому в 2003 году стал инициатором разработки идеи плантоида. Я был очарован возможностями, открывающимися перед конструктором, который сможет разгадать тайны растений и создать на их основе машину. Слово «плантоид» показалось мне наиболее адекватным для обозначения нового типа автоматов – по аналогии с «андроидом». Эти машины – дадим волю воображению – могли бы служить в самых разных исследованиях: от проникновения в глубины земли до освоения космического пространства.
Мои знания робототехники и по сей день остаются весьма ограниченными, поэтому в одиночестве я никогда не смог бы превратить свои идеи во что-то реальное. На самом деле, я боялся, что – как это часто случается в академической среде – еще одна идея останется всего лишь идеей, записками в блокноте, запертыми в ящике стола.
Однако мне повезло. Как раз в те дни, когда у меня в голове постоянно крутились мысли о плантоиде и способе его создания, – и всякий, кто имел несчастье остановиться и заговорить со мной, вынужден был выслушивать мои идеи (я давно заметил, что если меня что-то интересует, я становлюсь маньяком – все, кто меня знает, имели возможность убедиться в том, насколько я опасен), – я встретил человека, способного воплотить в жизнь то, что до того момента было лишь творческой фантазией, пусть и основательно подкрепленной теоретически. Барбара Маццолаи сегодня руководит Центром микроробототехники Итальянского технологического института (его штаб-квартира расположена в Пизе), однако в 2003 году, когда мы познакомились, она уже была превосходным исследователем. Во время учебы в университете она получила достаточно обширные знания в области биологии. Постепенно наши разговоры о растениях и автоматике стали привычкой, сколь естественной, столь и необходимой, и она тоже заразилась идеей плантоида. Чем активнее мы обсуждали идею его создания, тем больше мы убеждались в том, что она вполне реализуема. Да, перед нами стояли многочисленные технические проблемы, но все их можно было решить. Чем дальше, тем быстрее росла наша уверенность: плантоид увидит свет.
Создать робота с нуля, причем на основе абсолютно новой концепции, да так, чтобы он был готов работать по-настоящему, а не в качестве механической игрушки – задача не для слабонервных, она требует времени, труда и финансовых вложений.
Как и все исследователи-энтузиасты, мы были готовы вкладывать не только труд и время, но и собственные деньги, которые вряд ли могли бы спасти ситуацию (я не буду раскрывать здесь тайну зарплаты итальянских ученых, это просто стыдно). Однако найти спонсора, фонд или другую организацию, готовую инвестировать в проект, было не так-то просто. Поиски заняли довольно значительный период времени. Поначалу теоретические выкладки и солидные доказательства, которые нам с Барбарой казались ясными и невероятно убедительными, оставляли всех, к кому мы обращались, совершенно равнодушными (ну или совсем капельку заинтересованными). К сожалению, убедить тех, кто смотрит на растения, как на что-то примитивное и обыденное, годное для украшения садов и приготовления гарнира, в наличии у них невероятного потенциала – не так-то просто. Еще труднее оказалось убедить потенциальных инвесторов в том, что, имитируя растения, мы сможем создать роботов нового поколения. Для меня, очарованного идеей, это представлялось совершенно ясным, и я надеюсь, что вы, мои дорогие читатели, согласитесь с моим мнением! Однако потенциальные инвесторы и руководители разных фондов не находили в моих идеях ничего завораживающего и не видели конкретных перспектив. Казалось, что то, что они называли «осторожностью», а я – «нехваткой воображения», вот-вот приведет к проигрышу. Однако никогда не надо терять надежду, особенно если вы ищете средства на реализацию перспективного проекта. Если вы на самом деле верите в то, что предлагаете, рано или поздно кто-нибудь обязательно заразится вашим энтузиазмом.
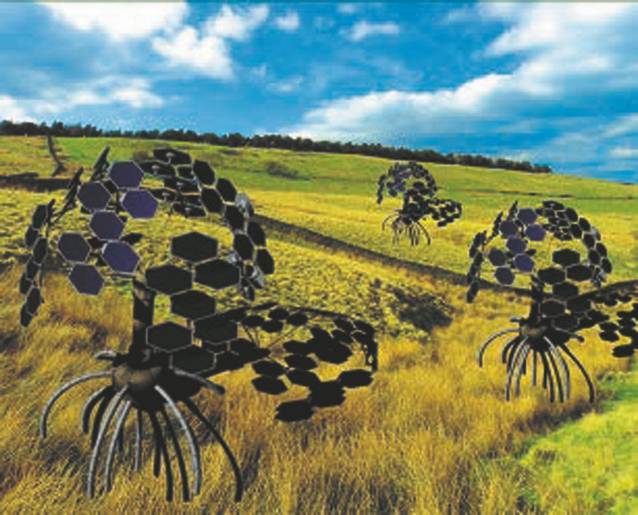
Такими плантоидов изобразил художник. Поскольку эти роботы созданы в подражание растениям, они могут применяться для любых работ с почвами, разведки полезных ископаемых, очистки природных ресурсов от загрязнений.
Так и случилось с Ариадной, руководителем группы новых проектов Европейского космического агентства (ЕКА). Наши аргументы в пользу возможности создания космического робота, в основу которого была бы положена структура растения, ее убедили. В результате нам удалось получить финансирование на создание технико-экономического обоснования проекта. Финансирование было ограниченным и не позволило нам создать модель, но очень помогло сформулировать идею и предугадать вероятные проблемы, которые могли бы помешать удачной конструкции плантоида. Мы сделали для ЕКА замечательный финальный отчет (с которым можно ознакомиться в Сети) с обещающим названием: «Bio-inspiration from plants’roots» («Вдохновляясь растительной корневой системой»). В отчете в подробностях были изложены перспективы и детали создания плантоида и возможности его использования для освоения космических пространств (например исследования Марса). Наш основной посыл формулировался просто: поскольку растения являются первопроходцами в освоении нашей планеты, результаты исследования их способов выживания, воплощенные в плантоиде, могли бы подарить ученым машину, обладающую большим запасом сопротивления враждебной среде. А пока мы не знаем в космосе ничего более враждебного, чем атмосфера Марса.
Проект предусматривал выброс большого количества плантоидов в марсианскую атмосферу, где предполагалось их оставить. По своим размерам они не должны были превышать 10 см. Плантоиды рассеялись бы по Красной планете и запустили корни в марсианскую почву. Так им удалось бы исследовать подпочвенные слои, наружные же подобия листьев обеспечивали бы им практические неиссякаемый приток энергии, благодаря фотоэлементам. Наш проект обещал переворот в освоении Марса! Вместо того, чтобы отправлять на Марс огромные и дорогущие марсоходы, которые двигаются очень медленно и способны исследовать лишь небольшой кусочек поверхности планеты, можно было заслать туда тысячи плантоидов, которые бы исследовали не только почвы, но и атмосферу, распространились по значительной площади и, не двигаясь вовсе, могли бы связываться между собой и с командным пунктом на Земле. Плантоиды передавали бы данные о составе почв из разных уголков Марса, что позволило бы значительно быстрее и точнее построить карту планеты.
По завершении исследования для ЕКА проект снова подвис и несколько лет ожидал финансирования. Наконец, в 2011 году мы с Барбарой попробовали получить помощь от Европейского союза – мы приняли участие в конкурсе самых фантастических проектов, характеризующихся высокой вероятностью неудачи и в то же время высоким уровнем инновационности. Эта программа получила название FET (Future and emerging technologies) и стала самой престижной ареной конкуренции за финансирование среди авторов самых революционных идей в области новых технологий в Европе. Мы назвали нашу заявку «Плантоид». Проект «Innovative robotic artefacts inspired by plant roots for soil monitoring» («Инновационная роботизированная технология мониторинга почв на основе устройства корневой системы растений») получил умопомрачительную оценку – 15 баллов из 15! Абсолютное большинство голосов! Таким образом у нас появилось нормальное финансирование, которое позволило построить первый плантоид.

Первый прототип плантоида, сконструированный для европейского проекта FET (Технологии будущего), погружает корни в почву.
Последующие три года мы посвятили решению тысяч проблем, возникших в процессе проектирования и изготовления модулей, из которых состоит наш плантоид, и его окончательной сборке. Одним из главных камней преткновения для лаборатории Барбары стал процесс имитации роста корня – и он же принес наибольшие дивиденды. Это была на самом деле серьезная задача. Создание механизмов, способных к самовоспроизведению, является одной из ключевых проблем робототехники.
У растений процесс роста и движения корней обеспечивается двумя механизмами: делением клеток меристематических тканей в зоне деления на конце корня и распуханием клеток в задней части корня, так и именуемой – зоной роста. Оба эти механизма мы попытались воспроизвести в конструкции наших искусственных корней с помощью резервуара для пластика, который использовался для постоянного наращивания автоматического корня. Кроме того, стремясь воспроизвести разнообразные способности природного корня, мы снабдили наш автоматический корень акселерометром для надежного определения направления приложения силы тяжести; датчиком влажности, чтобы воспроизвести способность растения чувствовать малейшие изменения гидрорежима; несколькими химическими сенсорами; осмотическими преобразователями (устройствами, преобразовывающими осмотическое давление в движение), которые обеспечивали сохранение направления и проникновение в почву. Робот-корень был снабжен микроконтроллером, который обрабатывал информацию, поступающую от различных сенсорных устройств и создавал подобие распределенного интеллекта, свойственного растительным корневым системам. Когда мы наконец сконструировали корни аппарата, пришлось заняться листьями. Эта задача была менее сложной, и ее удалось решить с помощью фотоэлементов, которые имитировали процесс фотосинтеза и снабжали наш аппарат энергией, необходимой для выполнения всех оперативных функций.
Плантоид, воспроизводя адаптивную стратегию растения, движется очень медленно, тщательно исследуя окружающую среду, активно реагируя на изменения и демонстрируя низкое энергопотребление. Корни плантоида растут, как настоящие, и постепенно погружаются в почву с помощью осмотических преобразователей нового вида; все плантоиды коммуницируют между собой, обмениваясь данными и создавая распределенный интеллект, типичный для мира растений.
Сегодня плантоиды стали реальностью – их можно использовать в самых различных ситуациях и обстоятельствах: в местах химического или радиационного заражения, в случаях террористических атак, для картирования минных полей, исследования космоса, геологической разведки или поисков нефтяных месторождений, в мелиорации или высокотехнологичном сельском хозяйстве. Барбара продолжает совершенствовать аппарат и создавать специализированные версии для различных вариантов применения.
Итак, мы стоим в самом начале очень интересного пути, при этом количество людей, поддерживающих идеи воплощения в робототехнике принципов устройства растительного мира, постоянно растет. И я надеюсь, даже, скорее, уверен в том, что пройдет совсем немного времени, и мы увидим целые группы мирных плантоидов, ухаживающих за садами и фермерскими хозяйствами.
Библиография
F. Baluška, S. Mancuso, D. Volkmann, Communication in plants. Neuronal aspects of plant life, Springer, Berlino 2006.
P.B. Barraclough, L.J. Clark, W.R. Whalley, How do roots penetrate strong soil? «Plant and soil», 255, 2003, стр. 93–104.
A. Braun, The vegetable individual, in its relation to species, «The American journal of science and arts», 19, 1855, стр. 297–318.
C. Darwin, Journal of researches into the geology and natural history of the various countries visited by H.M.S. Beagle, under the command of captain Fitzroy, R.N., from 1832 to 1836, Colburn, Londra 1839 (trad. it. Viaggio di un naturalista intorno al mondo, Giunti, Firenze 2002).
E. Darwin, Phytologia. Or the philosophy of agriculture and gardening, Johnson, Londra 1800.
J.H. Fabre, La plante. Leçons à mon fils sur la botanique, Librairie Charles Delagrave, Parigi 1876.
J.W. von Goethe, Versuch die Metamorphose der Pflanzen zu erklären, C.W. Ettinger, Gotha 1790 (trad. it. La metamorfosi delle piante, Guanda, Parma 2013).
E.L. Greacen, J.S. Oh, Physics of root growth, «Nature new biology», 235, 1972, стр. 24–25.
S. Mancuso et al., Plant neurobiology. An integrated view of plant signaling, «Trends in plant science», 11 (8), 2006, стр. 413–419.
S. Mancuso et al., The plant as a biomechatronic system, «Plant signaling & behavior», 5 (2), 2010, стр. 90–93.
S. Mancuso, B. Mazzolai, Il plantoide. Un possibile prezioso robot ispirato al mondo vegetale, «Atti dei Georgofili 2006», с VIII, vol. 3, том II, 2007, стр. 223–234.
D. Murawski, Genetic variation within tropical tree crowns, in Biologie d’une canopée de forêt équatoriale. III: rapport de la mission d’exploration scientifique de la canopée de Guyane, octobre-décembre 1996, a cura di F. Hallé et al., Pronatura International e Opération canopée, Parigi-Lione 1998.
Назад: Индивидуальность растений
Дальше: III Тонкое искусство мимикрии

