Книга: Микромеханические системы и элементы
Назад: 3. Магнитоэлектронные датчики
Дальше: 3.2. Энкодеры
3.1. Магнитострикционные датчики
3.1.1. Устройство и принцип работы магнитострикционных датчиков
Магнитострикционный датчик – это линейная измерительная система, состоящая из магнитострикционного волновода (круглый полый прут или плоский профиль), подвижного постоянного магнита, определяющего позицию, и измерительной головки. Импульс волновода датчика генерирует вокруг него концентрическое магнитное поле, а позиционирующий магнит создает ориентированное вдоль оси волновода.
На рис. 3.1 представлен принцип действия магнитострикционного датчика.
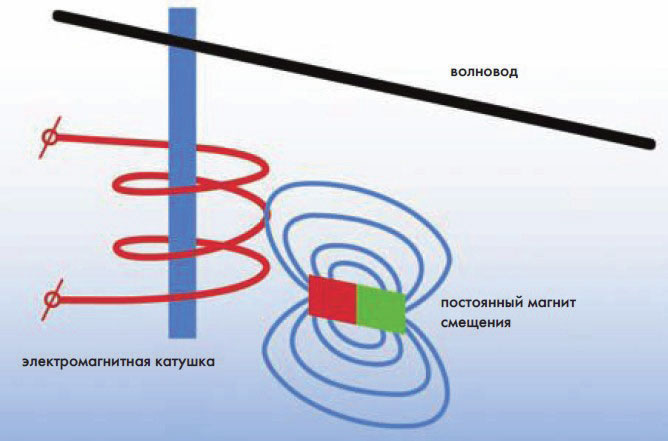
Рис. 3.1. Принцип действия магнитострикционного датчика
В результате взаимодействия этих двух полей в волноводе возникает упругомеханическая волна возбуждения, которая распространяется с ультразвуковой скоростью от местоположения вдоль волновода (эффект Видемана). Физический механизм возникновения волны без ущерба для научной строгости изложения может быть объяснен как результат взаимодействия спиновых моментов электронов внешней оболочки атомов магнитострикционного материала с внешним магнитным полем.
Спины результирующего импульса тока и постоянного магнита позиционирования изменяют энергию связи электронов внешней орбиты.
В результате в кристаллической решетке возникают упругие напряжения (магнитострикция), позволяющие «релаксировать» электронам в состояние с более низкой энергией. Дополнительно в точке постоянного магнита возникает волна упругомеханического возбуждения, которая и используется для оценки позиционирования.
Детектор датчика, находящийся в измерительной головке, состоит из электромагнитной катушки, сердечником которой является лента из фрикционного материала, к волноводу датчика. Все устройство помещается в магнитное поле постоянного магнита смещения.
Упругомеханические волны, возбуждаемые короткими импульсами тока (1–2 мкс), распространяются по волноводу с ультразвуковой скоростью около 3000 м/с.
На рис. 3.2 представлен вид детектора упругомеханической волны.

Рис. 3.2. Внешний вид промышленного детектора упругомеханической волны
При переходе упругомеханической волны магнитная проницаемость последней приводит к изменению магнитных свойств при появлении дополнительных напряжений в кристаллической решетке.
Результирующая плотность магнитного потока через катушку изменяется. Время распространения этой волны пропорционально длине измеряемого перемещения детали.
Упругомеханическая волна распространяется по волноводу и в противоположном направлении. И для того чтобы избежать возможных помех, связанных с сигналом, отраженным от границы волновода, энергия этой части волны поглощается демпфирующим устройством, сигнал которого останавливает локальное магнитное поле (эффект Виллари).
3.1.2. Магнитострикционные датчики разных производителей
Датчики компании Megatron
Рассмотрим вариативные особенности конструктивного исполнения магнитострикционных датчиков. Этот вид измерительных устройств разрабатывается в неблагоприятной внешней среде, например в условиях высокой запыленности в цехах деревообработки. На рис. 3.3 представлен внешний вид магнитострикционного датчика компании Megatron.
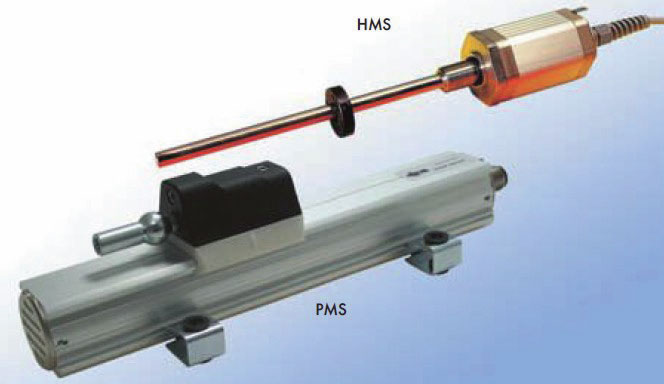
Рис. 3.3. Внешний вид магнитострикционного датчика компании Megatron
Датчики компании ASM
Магнитострикционные датчики компании ASM позволяют определять линейное перемещение в диапазоне до 5,75 м (10 типономиналов) и отличаются конструктивным разнообразием. Выпускаются модели с внешним магнитом позиционирования (PCQA 22), с магнитом, скрытым в кожухе волновода (PCQA 23, PCRP 21), в особо плоском исполнении PCFP 22 (толщина 12 мм), а также взрывобезопасная серия датчиков типа PCST 21E.
Большим разнообразием отличается представление выходной информации: кроме стандартных аналоговых выходов, есть возможность встраивания на заказ наиболее распространенных интерфейсов – SSI, CANop, DeviceNet, Profibus [3].
Эффективность применения магнитострикционных датчиков в современной электронике обусловлена их основными преимуществами: абсолютный принцип измерения – движение подвижной детали оборудования непосредственно постоянным магнитом позиционирования – нуждается в юстировке нулевой позиции.
Из отличительных качеств необходимо отметить: устойчивость к влаге, степень защиты IP-67; высокая устойчивость к вибрации и ударам – бесконтактное (относительно волновода) прохождение волны возбуждения по волноводу не зависит от механических воздействий; высокое разрешение позиционирования ~2 мкм; отсутствие электропитания позиционирующего магнита (автономный режим).
Магнитострикционные датчики обеспечивают измерения в очень широком диапазоне – при этом отсутствуют условия износа трущихся активных поверхностей.
3.1.3. Магнитострикционные датчики линейного перемещения
Современные магнитоиндуктивные датчики линейных перемещений ряда WIM работают с использованием индуктивного принципа действия. Выходной сигнал датчика – ток или напряжение (4…20 мА или 0…10 В), пропорциональные положению магнитного датчика. При этом датчики компактны и, кроме того, нечувствительны к небольшим боковым смещениям датчика положения.
Имея воспроизводимость 0,5 %, такие устройства обеспечивают точные значения позиции.
Температурный дрейф составляет 0,09 %/°С. Имея подобные характеристики, этот ряд заполняет промежуток между чисто дискретным позиционированием и высокоточными измерительными электронными системами. С помощью WIM-датчиков можно просто и экономично решить многочисленные задачи не только в классическом машиностроении, но и в других отраслях: робототехника, грузоподъемная техника и др.
Внимание, важно!В связи с тем, что датчик положения имеет осевую намагниченность, он нечувствителен к поворотам самого магнита. Поэтому они могут использоваться во многих случаях, когда установлен намагниченный в направлении определения расстояния датчик положения, например при измерении потоков с помощью качающегося флажка или в подъемных вентилях. При этом имеющийся магнит во многих случаях может и далее использоваться, что существенно упрощает переоборудование.
Магнитоиндуктивные датчики линейных перемещений имеют три диапазона измеряемых перемещений (30 мм, 70 мм и 110 мм), четыре различных датчика положения и прочное механическое исполнение. Благодаря этому, а также бесконтактному принципу работы они имеют универсальное применение.
На индуктивный датчик перемещений WI70 воздействует короткозамкнутое кольцо, в которое входит чувствительный элемент датчика. Короткозамкнутое кольцо может быть специально изготовленным объектом. Но короткозамкнутым кольцом может являться и глухое отверстие в детали, и отверстие в листе металла. Поэтому упрощаются сфера и возможности применения датчика.
Датчики линейных перемещений, работающие на магнитострикционном принципе TURCK, служат для измерения перемещений в диапазоне от 100 до 4500 мм. Они работают бесконтактно на магнитострикционном принципе и при разрешении 16 бит имеют точность, близкую к мкм-диапазону. Предлагаются стандартный и экономичный варианты.
В обоих измерительный диапазон подстраивается для конкретного применения путем простейшего программирования. Стандартный ряд имеет дополнительно трехцветный светодиод индикации режимов работы, а также настройку на силу внешнего магнитного поля.
Экономичный (LC) ряд вследствие его более низкой цены лучше всего подходит для применения в стандартных установках.
Датчики линейных перемещений TURCK являются наилучшим решением для многочисленных применений: имея диапазон рабочих температур -40…+70 °C и вид защиты IP67, эти датчики удовлетворяют самым жестким требованиям. Минимальная высота корпуса (только 21 мм), а также очень маленькие мертвые зоны (только 76,2 мм в начале и 38,1 мм в конце датчика) позволяют применение датчика в ограниченных пространствах.
Стандартизованный разъем М12х1 существенно облегчает подключение датчика. С помощью новых датчиков линейных перемещений могут решаться задачи позиционирования с высокой точностью во многих отраслях:
• металло– и деревообрабатывающие станки;
• прессовое оборудование;
• формовочное, прокатное и литейное оборудование;
• термоавтоматы и др.
Новые магнитоиндуктивные датчики линейных перемещений модельного ряда WIM функционируют на новом индуктивном принципе работы. Их выходной сигнал представляет собой ток или напряжение, пропорциональные расстоянию магнита – датчика положения от самого датчика. Эти датчики в зарубежной литературе имеют также название «датчики линейных перемещений типа TURCK»; они служат для измерения перемещений в диапазоне от 100 до 4500 мм.
Такие электронные устройства работают бесконтактно на магнитострикционном принципе и при разрешении 16 бит имеют точность, близкую к мкм-диапазону. Измерительный диапазон при конкретном применении подстраивается путем простейшего программирования.
На рис. 3.4 представлен функционал датчика линейных перемещений.
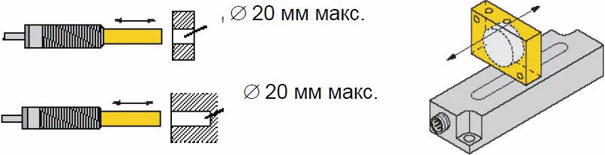
Рис. 3.4. Функционал датчика линейных перемещений
На производстве датчики линейных перемещений можно встретить нередко. На рис. 3.5 представлен вид пресса, в котором задействован датчик линейных перемещений.
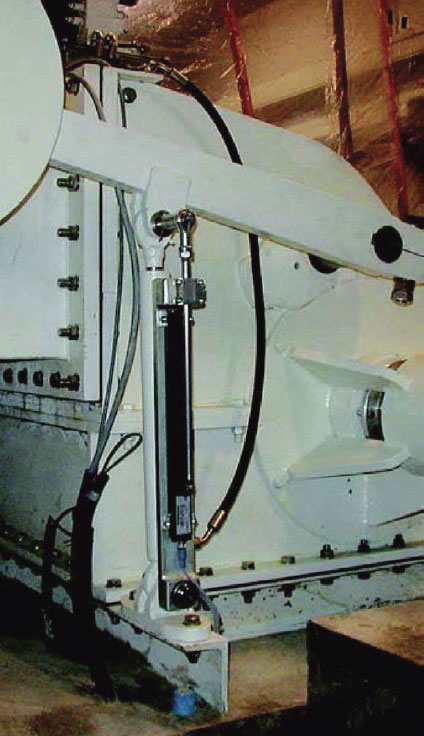
Рис. 3.5. Датчик линейных перемещений обеспечивает контроль работы мощного пресса
LTX250M-R10-LU0-X3-H1151
Эти разновидности магнитострикционных датчиков LTX250M-R10-LU0-X3-H1151 предназначены для гидравлических цилиндров.
Датчик устойчив к давлению до 340 бар (постоянно), 680 бар (краткосрочно). Ударостойкость до 1000 g. Индикация статуса: 3 светодиода, разрешение 16 бит. Программируемый измерительный диапазон.
Рабочая температура стержня от -40 до +105 °C.
Рабочая температура электроники от -40° до +85 °C.
Степень защиты IP68.
Питание 7…30 В.
Аналоговый выход, 0…10 В.
Разъем M12x1.
На рис. 3.6 представлен внешний вид магнитострикционных датчиков LTX250M-R10-LU0-X3-H1151.
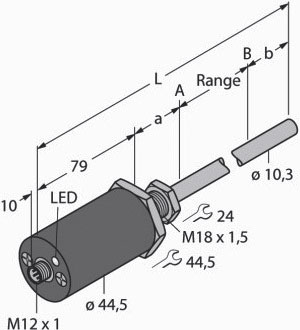
Рис. 3.6. Внешний вид магнитострикционных датчиков LTX250M-R10-LU0-X3-H1151
На торце датчика с тыльной стороны имеется разъем для электрического подключения.
Принцип действия датчика LTX-R10
Датчик LTX-R10 является магнитострикционным, оптимизированным для точного регулирования положения в гидравлических цилиндрах. С помощью дополнительных поплавков датчики положения с активирующим магнитом также позволяют реализовать функцию контроля уровня заполнения резервуаров.
Датчики абсолютного значения надежны и точны, сохраняют информацию о положении в случае снятия напряжения, так что дополнительное обнуление не требуется. Датчики функционируют на бесконтактном функциональном принципе и являются «неизнашиваемыми», не нуждаются в техническом обслуживании.
Внимание, важно!Как пользоваться программируемым магнитострикционным датчиком. Поместите магнит в нужную начальную точку. Соедините контакт 2 (программный ввод) и контакт 3 (земля) примерно на 4 секунды. Прервите соединение на 1 секунду. Соедините контакт 2 (программный ввод) и контакт 3 (земля) снова еще на 5 секунд.Таким образом, вы успешно запрограммировали начальное положение. Поместите магнит в нужную конечную точку. Соедините контакт 2 (программный ввод) и контакт 3 (земля) примерно на 4 секунды. Прервите соединение на 1 секунду. Соедините контакт 2 (программный ввод) и контакт 1 (+) снова еще на 5 секунд. Теперь вы успешно запрограммировали конечное положение датчика.
Принцип действия датчиков Balluff Micropulse
Принцип действия магнитострикционных датчиков линейных перемещений Balluff Micropulse основан на том, что датчики линейных перемещений (датчики линейного положения, измерители пути и т. д.) применяются во многих отраслях промышленности во всем мире. Измерители пути, которые используют принцип магнитострикции, обладают характеристиками, обеспечивающими надежную работу во множестве областей автоматизации, включая самые тяжелые условия.
Везде, где требуется определить точное положение объекта, движущегося по прямой, эти сенсоры могут помочь – от гидравлического цилиндра до машины инжекционного литья или резки бумаги.
Мировыми лидерами в разработке и производстве магнитострикционных датчиков линейных перемещений являются компании Balluff (датчики перемещения под маркой Micropulse) и MTS Sensors (датчики Temposonics).
Магнитострикционный эффект обусловливается совокупностью магнитных и механических свойств ферромагнитных материалов, соответственно, его можно оптимизировать посредством создания специальных сплавов и управлять с помощью направленного действия внешнего магнитного поля.
В промышленных измерительных системах Micropulse и Tempo sonics используется магнитострикционный эффект, который называется эффект Видемана.
Он описывает механическую деформацию (скручивание) длинного, тонкого ферромагнитного стержня, который находится под воздействием двух магнитных полей: внешнего и внутреннего, создаваемого проводником, по которому протекает электрический ток.
В датчиках линейных перемещений Balluff Micropulse внешнее магнитное поле создается позиционным магнитом, которое при пересечении с концентрическим магнитным полем, создаваемым электрическим током, вызывает механическую деформацию в небольшой области измерительного элемента в форме стержня.
Также в датчиках Micropulse используется эффект Виллари. Он связан с изменением магнитных свойств ферромагнетика, к примеру намагниченности ферромагнитного бруска, которое вызывается продольной деформацией.
Датчик линейных перемещений Micropulse состоит из пяти основных частей:
• измерительный элемент (волновод);
• электроника датчика;
• позиционер в виде постоянного магнита;
• преобразователь торсионного импульса;
• демпфирующая часть (на конце стержня, в которой гасится вторая часть торсионного импульса).
«Стержнем» измерительной системы является ферромагнитный измерительный элемент, использующийся как волновод, по которому распространяется торсионная ультразвуковая волна до преобразователя импульсов. Измеряемая позиция определяется положением постоянного магнита, который окружает волновод. Магнит создает магнитное поле в волноводе и связан с объектом измерения.
Внимание, важно!Между позиционером (магнитом) и измерительным элементом (волноводом) полностью отсутствует механическая связь. Это гарантирует очень долгий срок службы датчиков Baluff Micropulse (MTS Temposonics) на основе этого принципа измерения. Волновод в сенсорах линейных перемещений Micropulse имеет наружный диаметр 0,7 мм, а внутренний 0,5 мм. Медный проводник проходит по всей длине волновода.
Измерительный процесс инициируется коротким импульсом тока, который посылается из электронной части сенсора по медному проводнику. При перемещении импульса возникает радиальное магнитное поле вокруг волновода.
При пересечении с магнитным полем постоянного магнита-позиционера возникает, согласно эффекту Видемана, пластическая деформация магнитострикционного волновода, которая является динамичным процессом, вследствие скорости токового импульса. Из-за этого возникает ультразвуковая торсионная волна, которая распространяется от места возникновения в оба конца волновода, однако в одном из концов она полностью гасится, и, таким образом, помехи и искажения сигнала исключаются.
Скорость распространения этой волны в волноводе составляет примерно 2830 м/с, и на нее практически не оказывают никакого влияния внешние факторы (загрязнения, температура, удары и т. д.). Детектирование и обработка торсионного импульса происходят на другом конце волновода – в специальном преобразователе.
Преобразователь торсионных импульсов состоит из расположенной поперек волновода и жестко связанной с ним полосы из магнитострикционного металла; детектирующей катушки индуктивности и одного неподвижного постоянного магнита.
В преобразователе торсионного импульса сверхзвуковая волна вызывает изменение намагниченности металлической полосы согласно эффекту Виллари.
Следующее из этого временное изменение поля постоянного магнита индуцирует электрический ток катушке индуктивности. Этот возникающий электрический сигнал окончательно обрабатывается электроникой датчика.
Точное определение позиции получается измерением времени между стартом токового импульса и времени возникновения ответного электрического сигнала, которое определяется в преобразователе торсионных импульсов при детектировании ультразвуковой волны.
При кажущейся внешней сложности принципа измерения, на котором созданы датчики линейных перемещений Balluff Micropulse, очевидно несколько преимуществ, которыми они обладают: измерять расстояние можно с наивысшей точностью; металлические магнитострикционные материалы обладают долговременными и очень стабильными параметрами; благодаря специальному дизайну и конструкции датчика вся измерительная система надежно защищена от внешних воздействий, к примеру от вибрации станков.
Из суммы этих преимуществ получаем высокоточные датчики перемещения Balluff Micropulse, обладающие высочайшей повторяемостью измерений и большой надежностью.
Воплощение магнитострикционного принципа в измерительную систему, удовлетворяющую суровым требованиям промышленного производства, ставит высокие требования к возможностям и компетенции производителя датчиков. Именно так получается наиболее уверенный и точный сигнал, так как регистрируется только торсионная часть механической волны, а продольные колебания не оказывают влияния на результат измерения.
Применение торсионных волн и регистрирующей системы, которая реагирует только на торсионную (скручивающую) волну, позволяет не бояться влияния вибрации на процесс измерения, так как торсионный импульс нельзя вызвать внешней механической вибрацией.
Для того чтобы все физические процессы принципа измерения могли протекать без влияния со стороны внешних воздействий, производитель использует специальные механическую конструкцию корпуса и электронную схему при обработке сигнала.
Причем в каждом поколении магнитострикционных датчиков Balluff конструкция и схема совершенствуются и развиваются на самом современном уровне.
Кроме того, простые задачи регулирования можно решить и c помощью индуктивных датчиков, имеющих аналоговый выход. Выходным сигналом таких датчиков могут быть ток, напряжение или частота, пропорциональные расстоянию до объекта.
К примеру, у аналоговых датчиков выходной сигнал линейно зависит от расстояния до определяемого объекта во всем рабочем диапазоне.
На рис. 3.7 представлены технические сведения об основных типах магнитострикционных датчиков.
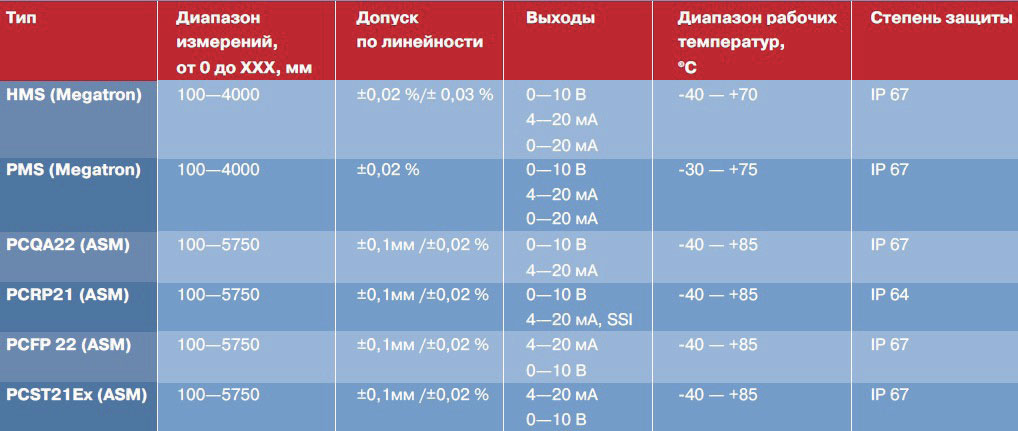
Рис. 3.7. Основные типы магнитострикционных датчиков
Назад: 3. Магнитоэлектронные датчики
Дальше: 3.2. Энкодеры

