6: Causes of Distortion
The term distortion is normally used to mean that the output signal differs in
some way from the input signal. In the ideal amplifier the output signal should be an exact replica of the input signal, but larger in amplitude.
Distortion can be of different forms, these being harmonic distortion or inter-modulation distortion. In audio amplifiers, harmonic distortion is usually the type that is encountered. By contrast, in RF linear amplifiers inter-modulation distortion is normally the type that most concerns us. The harmonics developed in an RF amplifier can be filtered out but in an audio amplifier they cannot and are audible to the listener.
Emission Distortion
This type of distortion is not commonly found in amplifiers but it is noticeable in other circuitry. As has been explained, the electrons generated by the cathode are available to provide a flow of current to the anode, by being attracted to the high positive potential of that part of the valve. If the capacity of the cathode to boil off electrons is limitless, any desired value of anode current could be achieved. In practice valves are normally designed and made to provide just sufficient electrons, with a due allowance for over-load conditions, so that throughout the life of the valve it should never run short of electrons if operated under the recommended conditions.
There are, however, certain valves in which it is prudent to limit the electron generation capability to provide a form of safety device. If pushed well beyond its cathode ability any valve will eventually fail to provide enough electrons. When this occurs the anode current ceases to increase for an increase in the drive level.
This characteristic is deliberately used in rectifier valves (Fig 6.1). By starving the anode of electrons, it provides a simple and effective current limiting function. If the DC output of a valve rectifier is shorted out, which a short circuit smoothing capacitor or some other circuitry may provide in a fault condition, the rectifier output voltage drops significantly. The rectifier valve anodes will normally get red hot to alert the user to the fault condition. If the equipment is well designed normally a fuse, an over current or an over-temperature trip circuit will disconnect the AC input power.
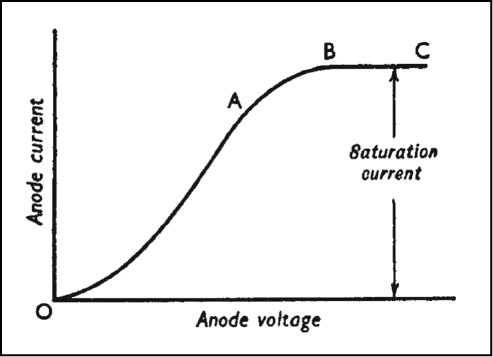
Fig 6.1: Anode current saturation of a rectifier diode.
By contrast, a modern semi-conductor rectifier will normally fail under this stressful condition. The rectifier valve is usually able to tolerate short-term short circuits with no ill effects. Part of the reason this is so is that the rectifier valve has a fairly high forward voltage compared to a semiconductor diode. In a silicon diode the forward voltage is about 0.6V at small currents and about 1V at full rating. A rectifier valve has a forward voltage measured in several volts. The minimum voltage drop is about 10V and the maximum is about 70V at full current rating. Although these figures seem high, when the DC output voltage is ~500V and higher they are a small percentage of the supply voltage and are not significant. Fig 6.2 shows the typical forward voltage for the EZ80 rectifier valve. From this, we can see that at the maximum rated output current the forward voltage is 30V.
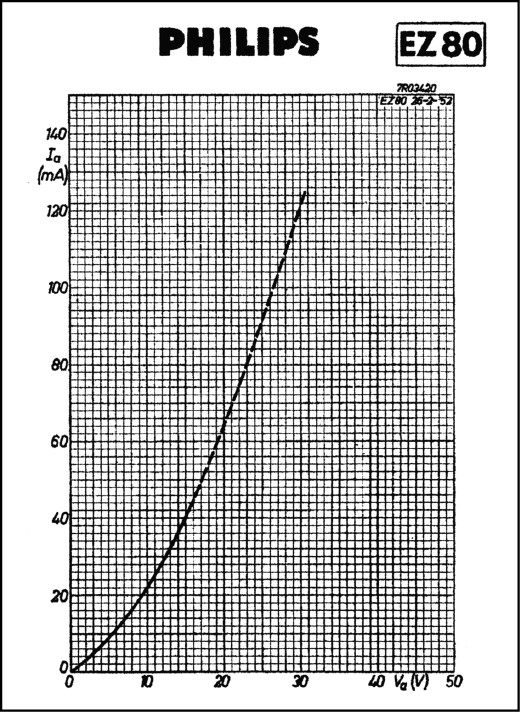
Fig 6.2: Forward voltage drop chart for the EZ80 rectifier valve (from a 1952 Philips data sheet).
They are also a better method of supplying the high DC voltage to other valve stages. This is because, at switch on, the rectifier filament is cold and although the transformer is supplying the rectifier with the required AC voltage the valve will not begin to conduct until the cathode rises above a certain temperature. Consequently, the output DC voltage rises gradually over a period of several seconds. This provides a nice gentle start as the other valves are also heating up. In semiconductor rectifiers feeding high voltage circuitry it is often the case that we need to provide some sort of soft-start mechanism to slow down the rapid rise in output voltage when first switching on. The high voltage electrolytic capacitors and the diodes can be damaged by the switch on surge.
This is also a problem with some equipment where the normal rectifier valve is replaced with modern silicon diodes. Not only is the soft-start ability lost, but the off load output voltage may be too high for the electrolytic capacitors. If fitting silicon diodes it is imperative to fit a suitable value resistor in series to limit the in-rush current and to provide some current limiting under short circuit conditions.
In common with all valves, the rectifier valve needs a certain anode-cathode voltage before it begins to conduct adequate current. In small rectifier valves designed for high voltage rectification it can be as high as 50V so the bottom portion of the sinusoidal waveform is chopped off and only the portion above about 50V is observed at the cathode output. This is of concern as the peak voltage is less than theoretically possible. (To compensate for the voltage lost requires a few more turns on the secondary, called compensating turns. This can often mean that if semiconductor diodes are used the lower forward voltage is then too high for the smoothing capacitor fitted.) When observed on an oscilloscope the output voltage is a vertical start and finish topped off with the normal sinusoidal crest of the signal. It has a conduction angle of slightly less than 180º. As such it is a distorted version of a true sine-wave, but in this application it is not a problem.
The typical output voltage observed at the cathode, without a smoothing capacitor, is shown in Fig 6.3. This is for a biphase rectifier using a dual rectifier valve. Because it is a dual valve biphase (full-wave) rectifier the two halves of the valves are fed in anti-phase from a centre tapped secondary. When one valve is conducting the other half is fully biased off. Each valve supplies half the output current required. The smoothing capacitor holds the peak voltage up in between the current pulses to give a relatively constant DC output voltage. The ripple frequency is twice the AC input frequency, so the fundamental frequency is completely suppressed and the only frequency at the output is the second harmonic. This technique is often used for a frequency doubler, as it only requires two diodes and a centre tapped secondary to attain good efficiency.
This type of waveform we will also meet later when we cover push-pull amplifier designs operating in Class B.
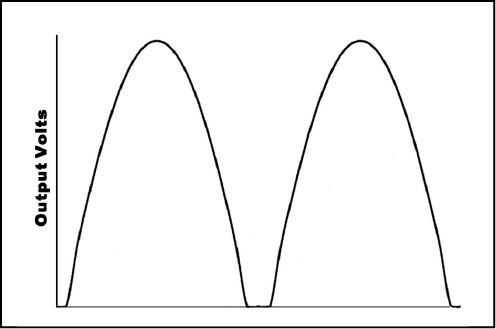
Fig 6.3: Typical full wave rectifier output voltage.
Harmonic Distortion
This is normally accepted as distortion caused by the generation of frequencies that are exact multiples of the input signal. In an audio amplifier fed with a pure sinusoidal input waveform the second harmonic is twice the input frequency and the third harmonic is three times the input signal. Generally, the human ear is more sensitive to odd order harmonics and they tend to ‘colour’ the output signal, making it less attractive to listen to. In audio amplifiers the term Total Harmonic Distortion (THD) is commonly utilised. This is a percentage measurement of all the harmonic output signals added together, compared with the wanted original input signal. To make a THD measurement the output signal fundamental frequency is nulled out and anything left is regarded as the THD figure. In practice a certain amount of internally generated noise is also produced within the amplifier which is also detected by the measuring instrument. Hence, the THD is sometimes given as ‘THD + Noise’, as a Distortion + Noise Ratio to the wanted signal, usually stated in decibels.
In RF amplifiers harmonic distortion for types of signals such as CW and FM is of no great concern, as they can be filtered out using a low pass filter after the amplifier. However, the harmonic distortion does have a bearing on another type of distortion called Intermodulation Distortion, or IMD for short. The mechanism that generates the harmonic distortion is also responsible for the IMD generation.
In an ideal amplifier it would have no non-linearity in the device, but in practical devices such as valves and semiconductors there will always be some. It is the magnitude of the non-linearity that determines if the device is acceptable or not. The more linear the amplifier the lower the amplitude of the unwanted products will be.
InterModulation Distortion
In a linear amplifier, as well as the fundamental harmonic generation mechanism, there is also a second mechanism that is also caused by the non-linearity of the device. These extra products arise because the input signal is not a single tone but a complex signal containing two or more discrete carriers or tones. The mixing or modulation process that arises when two or more signals are passed through an amplifier generates these additional signals called intermodulation distortion products.
If the two carriers are closely spaced in frequency within the pass band of the amplifier, each signal will mix with the other signal. If the amplifier were perfectly linear no harmonics would be generated and no mixing could occur, hence no IMDs could be generated. But no such amplifier exists in the real world!
The generation of IMD prod-ucts is simple to understand if an example is used.
See Fig 6.4. A non-linear amplifier has two input signals of 3MHz and 4MHz. Each carrier will generate harmonics as well as the fundamental signal. For the case of the 3MHz carrier the output signals will be 3, 6, 9, 12MHz etc. For the 4MHz carrier the signals will be 4, 8, 12, 16MHz etc. If we take the 3MHz signal and combine it with the second harmonic of the 4MHz carrier and examine the sum and difference frequencies we have:
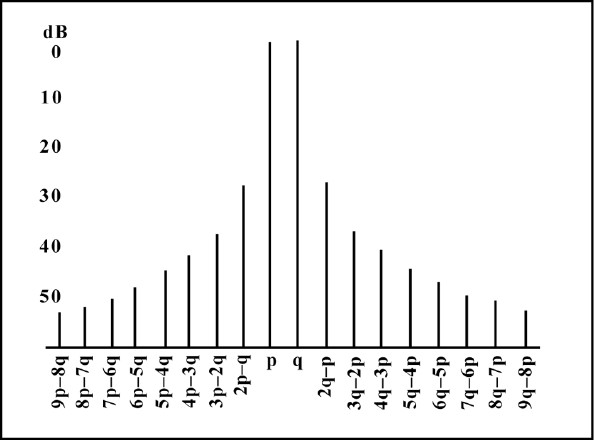
Fig 6.4: Typical IMD spectrum.
(8 + 3) = 11MHz and also (8 – 3) = 5MHz.
The 11MHz signal we can filter out but the 5MHz signal we cannot easily filter so it produces a new carrier above the 4MHz carrier.
For the 4MHz carrier and the second harmonic of the 3MHz carrier we have:
(6 + 4) = 10MHz and (6 – 4) = 2MHz. Again, the 10MHz unwanted signal is not a problem but the new 2MHz signal is. It is 1MHz below the 3MHz wanted signal and, like the 5MHz carrier, each of the new signals are displaced in frequency by the difference in frequency of the two original input signals.
If we now take the third harmonic of one carrier and the second harmonic of the other carrier and repeat the exercise we see these also generate new unwanted signals at 1MHz and 6MHz.
The first pair of new carriers are called the third order products (IMD3) as they result from (2f1 – f2) and also (2f2 – f1) of each input signal. The next pair of unwanted signals are called fifth order (IMD5) because (3f – 2f) is the number five.
Generally, the amplitudes of the various IMD products generated fall off as the IMD number increases. The IMD3 amplitude will be greater then the IMD5 amplitude and higher IMD numbers disappear below the noise floor of the measuring equipment and cannot be seen. They are still there, but they are at a level which is normally not a problem.
The traditional AM transmitter using a very non-linear anode modulated Class C stage is another example of a mixing process. Again, the two new signals occur either side of the main carrier separated by the frequency of the audio tone. If the carrier is at 1MHz and the audio frequency is 1kHz the sidebands will occur at 999kHz and 1001kHz. If, however, we attempted to produce AM using a very linear amplifier we would find that the amplitude of the sidebands is very low. This is because there is insufficient non-linearity to perform the mixing adequately.
Clipping Distortion
This type of distortion occurs when the input signal level is excessive. Clipping is a useful way of limiting the peak amplitude of certain signals, for example as a noise limiter, but for linear amplification it should be avoided. In the Class A amplifier if the grid voltage swings too high on the positive half cycle it can drive the grid positive with respect to the cathode. This causes several different effects.
In the case of clipping or flat topping, the anode current is driven into saturation on the positive peak of the input signal. As the output voltage of the amplifier is the inverse of the anode current, the output voltage waveform shows a near ideal top positive portion of the sinusoidal wave, but the negative bottom half cycle of the sinusoidal waveform is grossly distorted.
The high positive input half of the input signal can also cause grid current to flow. This effect is known in the valve industry as a virtual anode condition. If the grid is positive with respect to the cathode, it acts like an anode. Since the grid structure is normally very closely spaced to the cathode, only a few volts positive has a similar effect to the high positive voltage on the anode which, however, is spaced much further away. A small spacing needs less voltage difference to produce a large change in electron stream flow, therefore a small grid-cathode potential has as much effect as a large anode-cathode potential with a much larger spacing.
The grid-cathode spacing is usually very small, to ensure tight control on the electron flow in the space charge. The anode-cathode distance is normally much bigger. So a small potential difference between the grid-cathode has a significant effect, even though the anode-cathode voltage is much higher. All the electrons leaving the cathode ultimately have to go to some other electrode which is at a positive potential. Most will end up at the anode, but if the grid is slightly positive it will intercept some of the electrons. If the grid is very positive it will intercept a significant number, so depleting the total that are available to travel to the anode.
The ratio of the grid-cathode and by extension the grid-anode distances with the potentials dictates how many of the available electrons will be shared between the two electrodes. For example, if the anode voltage is 100V and the distance the electrons travel is 10mm this can be expressed as a voltage to distance ratio. (For larger distances the attracting electrostatic force of the anode to the electrons emitted from the cathode is weaker). In this example it is a gradient of 10V/mm. Consequently, if the grid-cathode spacing is small, say 1mm, it only requires 10V positive on the grid to intercept all the available electrons emitted from the cathode. When the grid voltage is less than the critical ratio less are diverted but it is still a significant percentage. The result of this is that the grid diverts a significant number of electrons from the anode stream.
These electrons would normally serve to produce higher anode current flow. This means that the valve anode resistance does not reach the lowest value possible, as insufficient electrons are available. It saturates at a fixed resistance for the period of the cycle that the grid is sufficiently positive. In reality it is this that causes clipping / flat topping.
A similar effect occurs in screen grid valves. In this mechanism, it is the excessive downward swing of the anode voltage that is responsible. If the anode voltage is driven below the screen grid voltage the screen grid assumes the role of the anode. This is similar to the virtual anode effect which the control grid uses to divert electrons away from the anode. It is known as a virtual cathode effect or simply bottoming effect. The various effects are shown in Fig 6.5, taken from an illustration in a textbook by Terman.
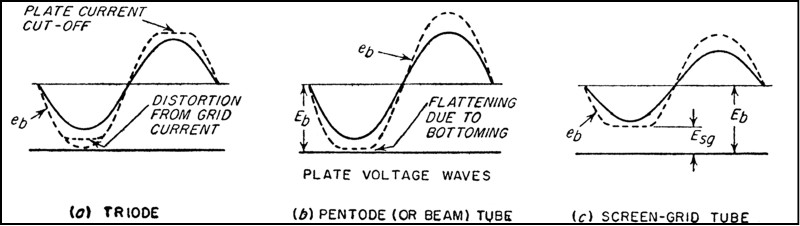
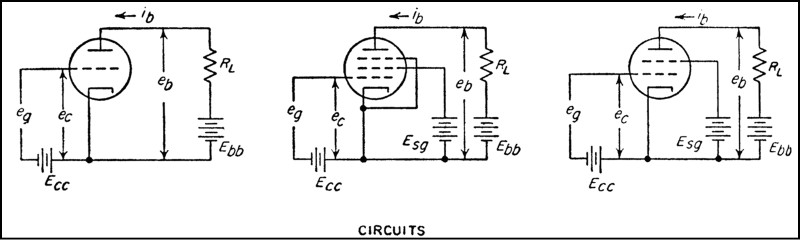
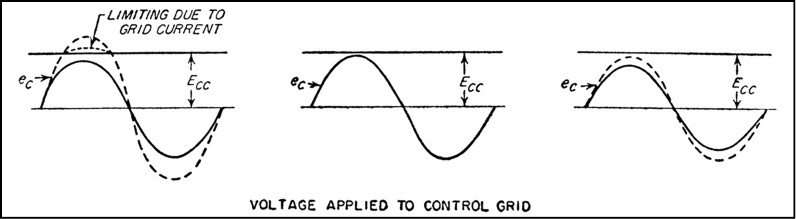
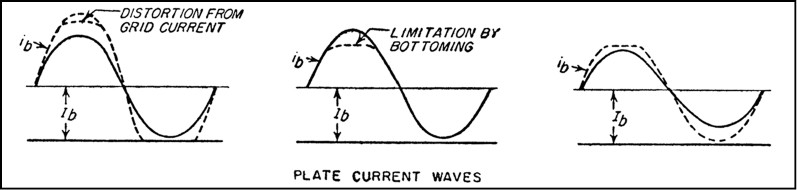
Fig 6.5: Clipping and bottoming effects (reproduced with permission from ‘Electronic & Radio Engineering’, Fourth Edition by F E Terman, McGraw-Hill, 1955).
If the anode voltage swings below the screen grid voltage the screen grid current rises from a low value to become much greater. When the anode voltage has fallen a few volts below the screen grid voltage a chain reaction starts. Firstly, the screen grid current rises rapidly, almost in an exponential manner, and it can assume dangerously high levels. The screen grid of a tetrode and pentode is not a high dissipation structure, unlike the anode which can dissipate considerable power, and it can heat up due to the current flowing and reach a temperature where the metal begins to melt. Should this occur, the released metallic vapour causes an ionisation cloud to form near the anode. This is like a mercury arc rectifier and normally a very large arc current is set up between the anode and the screen grid. If the arc is able to establish, the valve is quickly destroyed.
However, even if the screen grid current is prevented from reaching dangerous levels by current limiting resistors, or some other method, the clamping effect of the anode voltage still causes a flat bottom to appear on the bottom half of the output voltage waveform. This is identical to the control grid induced flattening of the bottom of the output voltage cycle. It can be difficult to tell which of the two grids is the culprit without making some experimental adjustments to the screen grid voltage. If by lowering the screen grid voltage the distortion is lower, the screen grid voltage was too high. Very often by lowering the screen grid voltage we find we can drive the valve a bit harder and attain a greater output power. This goes against common wisdom but it can be explained why this is so.
Output power is directly related to the available anode current and voltage swing. If by lowering the screen grid voltage by, say 20%, we can achieve an extra 20% of anode voltage swing, as power is a function of V2 / R, if the anode load remains substantially constant, the increase in potential output power is ~20%. To attain the extra anode current peak current is a small increase in driving voltage. By lowering the screen grid voltage the gain drops slightly but the greater available output power more than offsets this small decrease.
Grid Current Induced Clipping
The other effect, which is not usually appreciated, is that the generation of grid current causes a radical lowering of the grid impedance. The grid-cathode structure of a valve at low frequencies is essentially a very high resistance. At audio frequencies, it is several million ohms and it is shunted by a small parallel capacitance. This is generally a few pico-farads and has no effect as long as the frequency is low. However, when the grid is driven positive with respect to the cathode the very high resistance drops significantly. This is because a phantom diode region now exists. As the grid is driven more positive the grid current rises and so the effective resistance falls, from essentially an open circuit, to some lower value. If 3V of positive grid voltage cause 5mA of grid current to flow, then the effective grid resistance is now only 600Ω.
There is a special terminology for this effect: perveance. Valves that require very little positive grid voltage to induce large grid current flow are said to have high perveance, whereas those that have low grid current flow for the same condition are low perveance.
Some tetrode valves such as the Eimac 4CX150, 250 and the 350 are particularly susceptible to this type of distortion. In fact the Eimac 4CX350 cannot tolerate any grid current flow before distortion occurs. The reason a valve has a high perveance figure is because the spacing between the cathode and control grid is very small. In the 4CX150 / 250 / 350 series the gap between the cathode and grid is as little as 0.5mm. This allows tight control of the anode current, a high gm value, but higher perveance.
If the driving source or the grid circuit has a high impedance the lowering of the grid resistance lowers the grid voltage swing to less than it would be if the drive source or grid circuit had zero impedance. For this reason, the driving source must be able to source sufficient current with negligible voltage drop. This is illustrated in Terman’s first example for the triode valve (shown in Fig 6.5) and another diagram from his book, Fig 6.6, clarifies the matter.
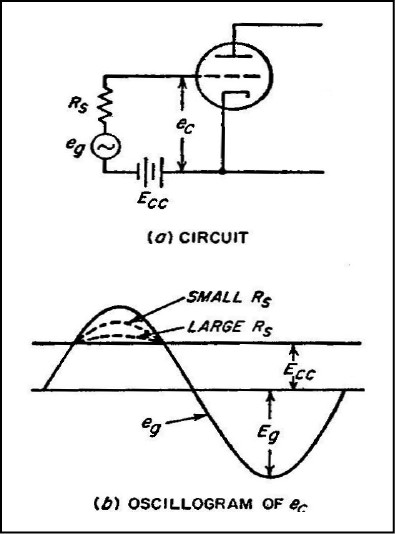
Fig 6.6: Effect of the grid resistance on drive waveform (reproduced with permission from ‘Electronic & Radio Engineering’, Fourth Edition by F E Terman, McGraw-Hill, 1955).
From this diagram we can see that when substantial grid current needs to flow the use of high value resistors to feed the grid bias to the valve cause distortion of the waveform. In Class C RF amplifiers this extra negative grid voltage obtained serves to self-bias the grid using just the drive signal. The grid capacitance serves as a smoothing capacitor to hold the charge.
However, in a linear RF amplifier this causes the grid voltage to become more negative than the applied fixed bias, known as grid DC shift. Although the valve is biased correctly with a fixed voltage (set in the absence of drive to obtain the required quiescent anode current), when drive is applied the grid voltage moves more negative when grid current flows. In the Class AB2 RF linear amplifier some grid current will flow. This more negative grid bias causes the operating mode to move towards Class C if the grid bias source has a high resistance in series with the bias voltage. Hence, it is imperative to use a low impedance bias source and to minimise the value of any resistors feeding this to the grid circuit. Often an RFC is a better option than a resistor.
Driver series resistance effect
Similarly, if the driving source has a high output impedance the increased loading as the grid voltage swings positive causes a lowering of the drive voltage due to the series resistance in the output network of the driving stage.
If the sudden drop in grid resistance causes the input voltage also to drop flat topping will occur. The valve is not at fault: it is the driving stage that needs improving to correct the effect.
The scenario is the same as an audio amplifier driving low impedance loudspeakers. Although the speaker might be 4Ω, the output impedance of a typical amplifier is a fraction of an ohm. Hence, it can develop a high current into the load with close to zero drop in voltage.
This effect is not normally a problem with small signal Class A type amplifiers, because the input signal is not normally large enough to approach the grid current point. However, in any sort of amplifier utilising a type of Class B method, which includes Class AB2 types, the driving source must be able to supply adequate drive power to force the grid to follow the waveform faithfully.
A simple method is to use a low impedance driver, that is one that can supply an excess of drive power, and to load the grid with a suitable damping resistor to terminate the driver stage. This is especially true for Class B amplifiers where appreciable grid current must flow.
If the RF signal generator is examined, a similar situation occurs. In this scenario the open circuit voltage is twice the loaded voltage, the PD and EMF situation. When the load is connected, half the available power is dissipated in the load and half within the generator.
Driver induced distortion
If an amplifier has a large variation in the input impedance when the drive is varied it is possible for this large impedance swing to have an effect on the driving stage. This is most often observed in RF linear amplifiers that utilise grounded grid triodes. The input terminal of the grounded grid triode is the cathode whilst the control grid is grounded to RF, either directly or via a DC blocking capacitor. The types of valves that are commonly employed for this type of amplifier are generally known as Class B zero-bias types. Examples of these valves are the 811 series, 572B and 3-500Z.
All of these grounded grid triodes display high values of grid current when fully driven. Typically the grid current will peak at about 30 to 40% of the anode current. This means for a triode indicating an anode current of 300mA when fully driven, it has a grid current of at least 100mA. If the cathode impedance is measured under no drive conditions the value we measure is several hundred ohms or higher. However, as soon as grid current begins to flow, the cathode input impedance falls to a low value and as the drive is increased to maximum it gets progressively lower.
This means that the driving stage is presented with a widely varying load impedance. If the driver stage is a valve type this is not generally a serious problem as the pi tank network can be adjusted to provide an adequate amount of power. However, the modern HF transceiver no longer uses valves, instead it uses broadband transistor amplifiers. These have no operator adjustments to match the transmitter to the load and depend heavily on the load being a relatively constant 50Ω load with low VSWR.
Although many types have an ATU included that can match over a fairly wide range of antenna impedance, this is not the case with a grounded grid amplifier. In an antenna mismatch condition it does not change with power level, so the ATU can provide a low VSWR match to the transmitter at any power output level. In the case of the grounded grid linear amplifier the impedance does change with power level, usually by a factor of 5:1 or more, depending on the drive level. Although it is possible to find a good match at full drive power by using the ATU, when the drive level is reduced the VSWR increases.
The HF push-pull broadband amplifier types using solid-state devices with ferrite wound transformers are particularly sensitive to reactive mismatch. When operated into a 50Ω dummy load or a well-matched antenna they behave correctly. But into a severely mismatched load they can exhibit high IMD products. These are presented to the input of the external linear amplifier and are simply amplified. Very often the culprit is claimed to be the linear amplifier. When the amplifier is switched out of circuit and the transmitter is now driving the well-matched antenna the IMD products fall to low levels. But in reality it is not the linear amplifier at fault but the driving transmitter.
This can be simply proved by connecting a directional coupler between the transmitter and the linear amplifier and feeding the sampled signal into a spectrum analyser. When the linear is switched into circuit the transmitter generates high IMD products because it does not like working into such an awful load impedance.
The writer has spent many hours investigating this type of problem. Some of the commercial HF linear amplifiers that use grounded grid triodes are not good, even when driven by a source immune to self IMD generation. In many cases the input matching networks to the cathode are far from optimum for source invariable matching. The worst types have no matching networks at all, they simple couple to the cathodes with a DC blocking capacitor. Others, that do at least attempt to utilise a matching network, design it for a loaded Q that is far too low to be effective.
Of the various valve types in common use, the 811 series are the worst. This valve originally entered production in about 1935. The later 811A had some tweaks to the design to allow use up to 30MHz in Class C RF amplifiers, not linear amplifiers – note! These are small low power dissipation valves and are easily over-driven by an unskilled operator. The 811 was never designed as a linear RF amplifier, it was originally intended for Class B audio amplifier duty where high power was needed. RCA arbitrarily selected a harmonic distortion value of 8% to categorise the valve. 8% distortion might be acceptable for public address amplifier service but it is far from being ideal for SSB amplification. Assuming that when used as an RF linear amplifier it still achieved 8% distortion, this equates to a third order IMD of about
–22dBc. To attain a more acceptable measurement of –30dBc means the power output cannot be any more than about 50% of the full rating.
Screen Grid Supply Distortion
As has already been touched upon, the screen grid type of valve has an extra grid that behaves in a similar fashion as the control grid. By varying the screen grid positive voltage the anode current can also be varied. In AM anode and screen grid modulated transmitters the inclusion of the screen grid allows fuller depth of modulation to be achieved. Hence, any variation of the screen grid voltage causes extra modulation. In SSB linear amplifier service this means that to ensure the most linear transfer curve the screen grid voltage must be stabilised to a very tight figure. If the screen grid voltage changes under drive extra non-linear mechanisms occur.
Some of the classic HF transceivers of earlier days used a hybrid approach. These were largely solid-state for the receiver and transmitter up to the driver stage. Thereafter the power amplification stages utilised valves. Often this was a 12BY7 driver and either a pair of 6JS6C or a pair of 6146 valves to obtain about 100W PEP output. Sadly, many of these HF transceivers omitted any sort of stabiliser for the screen grid supply of the PA valves. Consequently the screen voltage wobbled all over the place as the transmitter was driven. Not only that but the valves were allowed to be driven into a small amount of grid current before the ALC circuitry backed off the drive.
The grid bias supply was also a non-stabilised type, often a crude potential divider network using high value resistors. This aggravated the grid voltage shift under peaks of drive signal. As the mains voltage varies so does the anode, screen grid and control grid supplies. If the current drawn from the ac mains is high on speech peaks then it also suffers a small change and this is reflected in the anode, screen grid and control grid voltages. A variation of the anode voltage of about 10% maximum is not normally a concern but the other voltages wobbling around certainly are a concern.
Case Study
The writer modified a Kenwood TS-820 transceiver to see what improvement could be obtained by fitting firstly, a screen grid shunt stabiliser and, later, a grid bias stabiliser. This was prompted after considerable experiments had been made on 4CX250 and QQV06-40 VHF amplifiers, where significant improvements to both the IMD and the power output had been achieved.
The screen grid of the 6146 was lowered from the original Kenwood design of about +300V to a more suitable value of +175V. (RCA recommends that the 6146 screen voltage should not exceed +200V for best linearity. It seems the designers were unaware of this factor or chose to ignore it.) The fitting of just the screen grid shunt stabiliser lowered the IMD third order product by ~10dB at full output. Although the Kenwood TS-820 and TS-830 figures were pretty good before the modification, they were then exceptionally good. The worst case was –37dBc IMD3 at an output power of 120W PEP. Lowering the screen grid voltage allowed about an extra 15W PEP by simply adjusting the ALC circuit values to allow a little more grid current to flow. The anode voltage swing was improved by lowering the screen voltage, before lowering the voltage a virtual cathode effect was very noticeable.
The grid bias was next tackled and a shunt stabiliser designed and fitted. After this was adjusted there was no measurable shift in DC grid voltage when driven. Before the modification the DC shift measured at peak drive was almost 20V, moving the operating condition almost into Class C. This now eliminated the virtual anode effect and the grid RF voltage was noticeably more like a true sinusoidal waveform. Before, flat topping was very apparent. This allowed more grid current to flow on the peaks and, as a consequence, extra output power.
The 12BY7 driver valve was also fed from the 6146 screen shunt stabiliser and this improved matters even further. The driver was contributing some of the IMD products that were visible. The overall result was at 100W PEP the IMD3 figure fell below –40dBc. The IMD5 products almost disappeared into the spectrum analyser noise floor at around –55dBc.
valve and solid-state amplifiers COMpared
With the trend to utilise solid-state amplifiers, the amount of IMD generated needs to be considered. Although the solid-state approach removes the need for nasty high voltages and the need for the operator to know how to adjust the amplifier, the valve amplifier is still superior. As already mentioned, solid-state amplifiers cannot tolerate very much in the way of over-driving and to do so generates excessive IMD products. Below the 1dB compression point both types are pretty similar and have comparable IMD performance for the lower order IMD products. But the IMD products of the higher orders – 7th, 9th, 11th etc – do not fall away rapidly as the valve amplifier IMDs.
While the close-in IMDs of the two types are much the same, by the 7th order the valve transmitter’s IMD are disappearing into the spectrum analyser noise floor and anything lower than this cannot be measured. The solid-state transmitter IMDs fall away in a more gradual way and the products up to 15th order are visible above the spectrum analyser noise floor. An illustration of the differences can be seen in Fig 6.7, which is for two similar output power amplifiers driven with the same clean two-tone test signal.
If the two-tone spacing is ~1kHz, the splatter the solid-state transmitter generates is spread over ~7kHz either side of the centre frequency; that is it occupies at least 14kHz of spectrum. By comparison, the valve transmitter occupies only 3kHz either side of the main signal and falls away rapidly.
However, some linear amplifiers using grounded grid triodes are similar to the solid-state type because of the high grid current flowing in the triodes. By comparison a grounded cathode tetrode amplifier without any grid current is some 20dB better. This is because the tetrode inherently has a better transfer characteristic and is more linear. If some grid current does flow, as long as it is not excessive, the IMD performance is not degraded significantly. In fact, with a small amount of grid current allowed on the peak of the driving cycle, the IMDs can dip slightly. But if the drive is increased beyond this point they begin to rise dramatically. Hence, it is imperative that any external linear amplifier must be within the linear operating range. A simple way to ensure this is to use automatic level control (ALC).
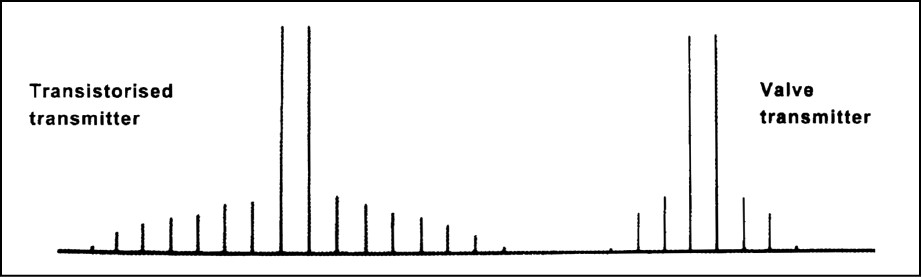
Fig 6.7: Comparison of IMD products.
Automatic Level Control
ALC is a feedback loop between the external amplifier and the driving transmitter. Essentially, it works in the same way as receiver automatic gain control (AGC). In a receiver the RF and IF gain stages are controlled by varying the gain such that a constant amplitude signal is presented to the detector stages. This means that a signal which is fading (i.e. varying in amplitude) is held at a steady value and the net result is that reception is improved.
In an ALC loop the transmitter has similar gain adjustable stages in the low power sections. Without an external amplifier the transmitter output stage output is detected in level and the gain stages adjusted to prevent the drive exceeding a certain level. This ensures that the output signal has low IMD products. The problem is that most external amplifiers need less drive than the transmitter is capable of generating, so they can easily be over-driven and this generates high IMD products.
In a correctly adjusted external ALC loop a small sample of the amplifier output is detected and it generates a DC voltage proportional to the output power. For historical reasons the DC output voltage is a negative going voltage: in the early days all transmitters used valves and to reduce the gain in a valve amplifier the grid voltage of the low power stages was changed to a more negative voltage. So the external linear amplifier ALC output voltage is a negative going voltage of between 0V and about –9V. This is sufficient to completely bias off the gain stages, so the average ALC voltage is generally a little less than this, perhaps between –4V and
–6V.
When this feedback signal is connected to the driving transmitter the amplifier output power controls the level of drive possible. If the ALC is correctly adjusted it is impossible to over-drive the external amplifier.
To adjust the ALC, firstly a small amount of drive is applied and the amplifier loaded up to the full rated output. Then the ALC cable is plugged in and drive is again applied whilst monitoring the output power. The drive is set to produce the wanted output power. The amplifier ALC adjustment is then used to make the output power just begin to reduce the output power. Thereafter the drive can be increased to maximum and whatever level the ALC has been set to will hold the amplifier at this maximum output power.
As most amplifiers have an input–output slope which tends to curl over near the top of the power range it is prudent to set the ALC to a level about 20% lower than the actual rated power. This ensures that the amplifier cannot exceed this power and it is below the 1dB compression point. 1dB is 20% in round numbers. For example, if the amplifier is rated by the manufacturer at 600W PEP it should not be driven any higher than 480W PEP to ensure good IMD performance.
If the amplifier has been tested and the IMD performance is known accurately at different power levels the exact upper power point can be more accurately determined.

