16: VHF RF Power Amplifiers
The use of valves is still very much in vogue when high power is needed for the
VHF and UHF bands. Although solid-state amplifiers are available, some leave a lot to be desired. The need for a low voltage high current DC supply somewhat precludes their use above a certain power level. If the amplifier is a 500W PEP type using 12V devices, the power supply needs to supply about 80A with the typical efficiency that true linear devices achieve of about 50%. The linearity it is possible to obtain with the lower voltage devices is poor compared with higher voltage types. A 12V transistor inherently is not a linear device above a certain power level. 28V devices are better, but when very high power is required they fall quite a bit short of valves in the linearity stakes. Consequently, those amateurs who use high power on VHF / UHF are mostly using valves such as the Eimac 4CX250 series as they provide adequate gain with simple circuits and they can also tolerate a fair bit of intelligent abuse when the going gets tough.
Many of the commercial amplifiers, however, have failed to heed advice from the valve manufacturers and some are real shockers when it comes to IMD performance. Often they can be improved but they shouldn’t need the owner to fix all the short cuts taken when it was designed.
Constructing a high power VHF or UHF amplifier is not a trivial exercise, so it pays to take heed of advice from those who have gone before so that some of the mistakes are not repeated. Some of the classic amplifier designs built by discerning amateurs over the years are today somewhat dated in the approach and can be improved by utilising better techniques. One of the classic designs is known as the ‘Weasel’ and is a dual valve push-pull 2m amplifier designed in the 1970s by two US amateurs [1]. One later had a new callsign of W1SL, hence the Weasel name. In its day the W1SL design was a big jump in technology, but today it is showing its age and a better method is possible.
The one big problem with the W1SL design, and others from the same period, is the necessity of using cross coupled neutralising to tame the amplifier. This is because the grid network is a high impedance type and it is very susceptible to anode-grid feedthrough signals. The grid network in the W1SL is far too high an impedance and it makes the tuning extremely critical. In the days when it was in vogue the driver power was limited to a few watts and hence it was necessary to utilise what little drive was available to the best advantage. Today most 2m transceivers have a far greater power output and a lower impedance grid network can be used to advantage. It is similar to the grounded grid HF amplifier, the power to drive to full output is closer to the full output power of the driving transmitter.
Choice of valve
The choice of the valves is a bit limited today but the old stalwart from Eimac, the 4CX250 series, is still a good choice when a reasonable amount of power is desired with good linearity. Some of the amplifiers, such as the Weasel by W1SL, are push-pull circuits and these are probably the most difficult to get working correctly. If the need is for an amplifier of 500W output we need to use two 4CX250 valves to attain this amount of power. Despite what some people have written, a good 4CX250 valve in a well-designed circuit is capable of a fair amount of power with good linearity. However, this will only occur if the power supply is designed to bring out the best of the valve.
The 4CX250 valve from Eimac data sheet parameters is capable of ~300W PEP output at 175MHz when operated in Class AB1. Although they can be driven much harder to produce more power in Class B or C, the limits of the linearity are largely defined by the cathode emission. For a power output of 500W two valves are needed along with the airflow bases and it makes very little difference if they are operated in push-pull or parallel. In both cases each valve is supplying half of the output power.
Push-pull or parallel operation
Of the two choices, the parallel circuit offers a simpler circuit with much less drama in commissioning. In a push-pull amplifier, the necessity of attaining a good amplitude balance with a true 180º phase difference for the grid drive and the anode tank circuit is often difficult. Richard Knadle, K2RIW, when he designed his 70cm amplifier, opted for parallel operation as it has definite benefits.
The often-punted advantage of push-pull operation that it suppresses the even harmonics better than a parallel amplifier is a poor excuse. Indeed, a properly designed and well balanced push-pull circuit will add a few more dB of even order harmonic suppression, but it does nothing for the odd order harmonics, which are often 10dB or more above the even ones. In frequency multiplier design a common method is to use a push-pull topology for a tripler to suppress the even order products and to enhance the odd order products, hence easing the filtering required.
However, many of the previously published designs for amateur push-pull amplifiers do not deliver good even harmonic suppression. This is because they overlook one important factor, that of grounding to RF the centre tap of the anode tuned lines. In most cases the RF dead point at the centre tap of the anode line is simply fed via an RF choke and allowed to float above ground. In the ARRL Handbook, edition 32, published in 1955, there is this important statement about harmonic outputs of various amplifiers: “For equal operating conditions, there is little or no difference between single-ended and push-pull amplifiers in respect to harmonic generation. Push-pull amplifiers are frequently trouble makers on even harmonics because with such amplifiers the even harmonic voltages are in-phase at the ends of the tank circuit and hence appear with equal amplitude across the whole tank coil, if the centre of the coil is not grounded. Under such circumstances the even harmonics can be coupled to the output circuits through stray capacitance between the tank and coupling coils. This does not occur in a single-ended amplifier if the coupling coil is placed at the cold end of the tank.”
If one considers the anode tank circuit of a typical push-pull amplifier, such as the W1SL, the reason is pretty obvious. The anode lines equate to λ/4 at resonance at the fundamental frequency. But at the second harmonic the anode line appears as a λ/2 and so the RF voltage at the so-called ‘dead’ end of the line is the same as appearing at the anode for the second harmonic, that is it is can be many hundreds of volts potentially. At the fourth harmonic the line equates to a length of a full wavelength and behaves the same as the λ/2 case. If the HT feed point is via a choke this point floats above ground and it will radiate the even harmonic power. Conversely, if the centre tap is grounded by a low reactance decoupling capacitor the even harmonic currents will flow to ground and be suppressed to a greater extent.
When designing a solid state linear amplifier in my professional work often a problem was getting the odd order harmonics down to acceptable levels. In cases such as these we often switched to parallel operation, as the suppression of all harmonics is more a factor of the accurate balance and optimising the linearity of the devices than anything else. In parallel or push-pull operation, if one device has more gain than the other it will tend to saturate earlier and generate harmonics and hence IMDs. For this reason, it was the norm to fit each device with its own bias control so that the optimum idle currents could be set individually to maximise the linearity.
If you need to suppress harmonics more, a low pass filter is the best option. When the specification demands all harmonics are –60dBc or even –80dBc down, which some systems demand, push-pull or parallel operation is not going to make any great difference. In reality the dBc figure required is entirely dependent on the absolute power level of each harmonic and this is laid down in official specifications. If the harmonic power level must not exceed 1mW and the amplifier is a 1kW type, then the dBc figure required is one millionth of the output power, or
–60 dBc. Achieving this in the amplifier is impossible and an additional LPF is normally required.
The secret of designing extremely linear amplifiers is to design an amplifier of three or four times the power required and then to run it at one third or one quarter of its potential peak power. IMD generation follows an odd order power law, that is why they are called third order, fifth order, seventh order etc (IMD3, IMD5, IMD7 etc). If at its full rated linear power output (that is well below the 1dB compression point) the amplifier produces, say, -30dBc IMD3, if the power is turned down by 3dB (half the power) the third order products should drop by 9dB and the fifth by 15dB. The seventh order will drop by 21dB and so on all the way up the IMD orders. If the power is again reduced by half we can expect the IMDs to drop another 9dB, 15dB and 21dB etc. Some transmitters, such as colour television broadcast types, demand IMD figures of better than –55dBc so as not to cause distortion on the picture. Very often, it is not possible to see the IMDs produced by these transmitters as they are in the noise floor on a spectrum analyser.
THE 4CX valve series
The 4X250B was developed by Eimac (Eitel-McCullough) from the original design of the 4X150A, with a part ceramic construction and glass seals. The original 4X150, introduced in 1946, used all glass-metal construction, but soon changed to part ceramic and part glass. It was later updated to the 4X150A / 7034 part number. The 4X150D / 7035 was the 26.5V filament option. In the early Eimac data sheets the power output at 175MHz was quoted as 300W, that is twice the anode dissipation value of 150W. This was for Class C operation, where the efficiency is much higher than Class AB1.
Several other manufacturers also made versions of the original 4X150 and later valves from Eimac under licence, these included RCA, MOV, Mullard / Philips / Valvo / Amperex, STC, GEC, English Electric, Siemens, Svetlana etc. The later 4CX250B / 7203, introduced in 1962, is a full ceramic-metal construction and is the CV6137. The 26.5V filament option was the 4CX250F / 7204. Eimac tend not to give the IMD figures for their versions of the 4X250 and 4CX250, but they do for some other valves, notably the larger 4CX350 series. The original 4X250 and 4CX250 were not exclusively specified for linear operation, although in the tentative data sheet Eimac does mention Class AB1 but seem to drop it until much later in 1970 when operating conditions for linear amplification again appear. Numerous design changes over the production cycle made improvements to the cathode and other internal parts which better suited linear operation in the later production versions. Another variant of the 4CX250 are the G and the K / M which are both coaxial valves and require a different socket.
Eimac Part Numbering
The ‘4’ means it is a tetrode and the ‘X’ in the part number denotes it is an external anode valve. The ‘C’ in the part number denotes it is of ceramic construction. The number 150 or 250 denote the CCS anode dissipation in watts. The ‘B’ at the end of the part number denotes the filament voltage, in this case 6V. There is also the ‘F’ version, which has 26.5V filaments, otherwise the two types are identical to all intents and purposes. The alternative numbers for the ‘B’ and ‘F’ are the 7203 and 7204 / 8621 respectively. All of these are interchangeable apart from the filament voltages. For the ‘B’ filament types the recommended voltage is 6V AC or DC at 2.6A for operation up to 300MHz, but they require a reduction of the filament voltage above this frequency due to cathode back bombardment which raises the cathode temperature.
The CCS rating is the Continuous Commercial Service where the valve is operated at 100% of its rating 24 hours a day and it is normally derated to extend the life between replacement. The Intermittent Commercial and Amateur Service rating (ICAS) increases some of the ratings on the assumption that operation is only intermittent and not 100% time on transmit. Hence, we can increase some of the rating figures, as the life of the valve is not reduced too severely when it spends less than half the time transmitting. The CCS rating is generally about 75% of the ICAS rating.
In the RSGB VHF-UHF Manual, edited by George Jessop, G6JP, published in 1972 there is this comment on the 4X150 valves: “In order to achieve the legal limit of 400 watts peak RF output with linearity, it is necessary to use larger valves. The 4X150 series of tetrodes are the obvious choice because of their efficiency up to 500MHz. Although these types are of quite an old design, they are likely to be used for at least another decade.” G6JP would never have imagined that some four decades after those words were written the 4X150 and the later 4CX250 series would still be in use and made, albeit in much smaller volumes that in 1972.
4CX250 Data
Looking at the various manufacturers’ data sheets for the 4CX250 series shows a broad agreement on the operating parameters. Eimac was the original designer but many other manufacturers made the 4CX250 series, sometimes giving it different part numbers. (The Mullard version is the QV2-250B, the Valvo version is the QEL2-275 etc). The Eimac version was available in several variants, these being mainly the filament voltage and some had internal ruggedised mechanics for high shock and vibration military service. The 4CX250R / 7580W is the specially qualified (high vibration) version, built for military applications requiring Class AB1 operation, which only affects its ability to carry on working under high shock and vibration loads. Not the sort of thing that amateurs normally require. Part of the upgrade for the ‘R’ version was an improved cathode structure, which gave a little more emission and hence output power. This change was carried over into the other valves as a normal production revision.
An oddity we don’t see much today was the 4CS250. This used a Beryllium Oxide electrical insulator and heat transfer block on the anode so it could be bolted to a heat sink to dissipate the heat generated. This valve has no finned anode radiator as the others do. (The English Electric version is the CCS-1.) It was also available in the 4CS250R version for military users.
A further short-lived version was the 4W300B, a liquid cooled version, which entered production in 1955 and was based on the 4X150 valve. It went through several updates and ended up with the 4CX250 internal components but retaining the liquid cooler, although it was discontinued in the mid-1970s (the ‘W’ in the part number denoted a water cooled valve). As can be determined from the 300 in the part number it had an anode dissipation of 300W.
One data sheet from STC Valves in the UK has some extra data, which Eimac did not give. This concerns the IMD performance. In the STC data sheet, full operating parameters of a test amplifier with an anode voltage of 2kV are given. The maximum output power at 175MHz is shown as 325W PEP and the third order IMD is –30dBc, which is quite respectable. The surprising thing is the fifth order IMD figure of
–50dBc for this output power. This rather tends to shoot down those whose opinion is that the 4CX250 is a ‘dirty’ valve. Of course, STC used very good power supplies to achieve this sort of performance and amateurs can also achieve similar results if the power supply is up to scratch. With the wealth of knowledge we have today, it is not too difficult to put into practice.
Combined driver and PA IMD parameters
A further factor is that in order to obtain low overall IMD figures the transmitter IMD driving the amplifier needs to be better than that of the amplifier to achieve these levels of IMD. Not only the driver IMDs are critical but also the harmonic performance needs to be exceptionally good to measure accurately the following amplifier IMD response. If the driver has significant levels of second and third harmonic products it will completely mask any IMD generated in the following amplifier. Very good low pass filtering is therefore normally required between the driver and the amplifier to reject these signals.
If the driver is a solid-state type the SWR matching of the amplifier input must present a low and constant SWR to the driver at all power levels. Solid-state amplifiers are particularly sensitive to reactive loads presented to them as the output stage is normally fixed tuned to deliver maximum power into 50Ω with no operator adjustment possible. Using a solid-state driver to drive a grounded grid amplifier is fraught with problems as the input impedance can vary over a wide range as the drive level changes. In many case the IMD is generated in the mismatched driver, rather than the amplifier, and the amplifier simply amplifies the dirty input signal up to a much higher level. Valve driver stages are far more tolerant of the reactive match presented to them because the operator can adjust the tuning and loading controls to present a good match, and so they do not materially affect the overall IMD performance.
There is a general rule when cascading stages that the driver IMD needs to be 6dB better than the following amplifier, otherwise what you measure is not really the amplifier’s true IMD but that of the driver and amplifier combined. Very few amateur grade 2m transmitters can achieve these sort of low IMD figures, especially the types that utilise 12V transistors and power modules. The old Kenwood TS-700 series of the 1970s, that used 28V transistors with a 20V DC supply, could achieve around –40dBc IMD3 at the 10W output level when correctly aligned. Looking at the recent published test results of modern day popular 2m transceivers it is rare to find any really good ones. One example had the IMD3 at –22dBc, which has to be some sort of a record! These transceivers tend to use 12V block power modules, which are often limited in the linearity possible by the technology used.
Valve bases and chimneys
Eimac supplies several varieties of bases, a low frequency base with or without screen decoupling designed for operation up to 30MHz, a UHF base with better screen decoupling and less inductance and two different bases for operation at VHF. In fact, Eimac does not make the bases, these are made by E F Johnson. In American parlance they are called sockets, hence the SK prefix for the part number. The two VHF bases are virtually identical apart from the connection pins. The
SK-600A has none of the pins connected to ground, whereas the SK-610A has the four cathode pins grounded by rivets to the bottom shielding ring. The screen grid decoupling capacitor is nominally 2,700pF ±500pF with a maximum voltage rating of 1kV DC. Ceramic chimneys used when blowing air from the base upwards through the anode cooler are the SK-606. The base pins are shown in the diagram and photo above and are listed in Table 15.1. Note that there is no pin 5 fitted and Eimac states that this pin is “An internal connection and must not be used”. The reason that no pin 5 terminal is fitted is that it is only used during manufacture to ignite the getter material whilst evacuating the envelope, and thereafter serves no useful purpose.
Pin number | Function |
1 | Screen Grid |
2 | Cathode |
3 | Heater |
4 | Cathode |
5 | Not fitted |
6 | Cathode |
7 | Heater |
8 | Cathode |
Table 15.1: Base pin connections for the SK series of valve bases
You will notice there is no mention of the control grid terminal, g1. This is because it doesn’t use the normal octal pins, but the centre boss of the base / socket and has a tapped hole to attach the grid network.

The SK-600A base.

The SK-600A base. Pin 5 is not fitted.
An oddity of the SK-600 / 610 bases is that if you measure between pin 1 and the metal shell you will find it is completely open circuit, and shows zero capacitance. Pin 1 is the screen grid terminal and has the decoupling capacitor. Pin 1 connects only to the valve and the connection to the screen grid ring, which in turn contacts the fingers on top connected to the decoupling capacitor, by a short metalised portion on the bottom of the valve. To measure the capacitance of the screen grid without a valve plugged in you have to connect between the finger-stock on the top of the base and the metal shell of the base. The picture of the Eimac 4CX250 pins shows the short metal bridging track between pin 1 and the screen grid ring. (The early STC versions do not have the metal bridge visible, it is an internal connection.) If purchasing used bases ensure that the decoupling capacitor is intact and not short or open circuit! A faulty decoupling capacitor is not visible from the outside of the crimped metal shell.
The reason for the SK-600A base / socket having all the pins floating is that Eimac also makes other tetrodes and triodes that use the same socket and these can be configured for either grounded cathode or grounded grid. Having the pins floating allows different connection schemes to suit the different valves. One option is to connect the heaters (pin 3 / 7) in either series or parallel. This allows operation on either 6V or 12V supplies when the ‘B’ version is used. The ‘F’ / ‘G’ version, being 26.5V heaters, is best connected in parallel.
Note that on the surplus market there are some odd varieties of bases to be found for the 4CX250 series. One in particular is often touted as a genuine VHF base. This is true, but it was especially designed for the US Air Force airborne pulse jammers using four 4X150 valves to generate 10kW peak pulse power and was designed to make the valve very unstable, by feedback from the screen grid to the control grid, just what is required for a self excited power oscillator! These bases have a Y-shaped metal strap that holds the valve in the base and they should not be used for linear amplifiers.
The British versions of the Eimac airflow sockets are of two generic styles. One was made by AEI and has a ceramic chimney retained by three spring clips which lock the chimney in place. The other manufacturer was Vactite, whose model has a PTFE construction and a separate PTFE chimney. Both types have the screen grid decoupling capacitor internally fitted.

View of the base pins of the 4CX250 with the external-bridging strip.
Grounded Grid Operation
The 4CX250 series is not designed for, and should not be used for, grounded grid operation. The grid dissipation is only 2W and attempting to operate in grounded grid will fry the delicate grid structure. Attempt this at your peril, and be prepared for a massive flashover inside the valve! Eimac issued this design note regarding grounded grid operation: “Certain tetrodes do not perform well when connected in the grounded grid circuit... These tubes are characterised by high perveance, together with extremely small spacing between the grid bars, and between the grid structure and the cathode. Thus, while performing in excellent fashion in a grid driven circuit, this family of tubes is unsuited for grounded grid operation. Tubes of the 4-65A, 4X150 (which includes the 7609), 4CX250 (which includes the 8930), 4CX300, 4CX350, 4CX1000A, and the 4CX1500 families are in this class.” Perveance is a term used in electron stream flow and relates to how the electrons are attracted to positive charged items. If a valve has high perveance it needs very little positive charge on the control grid to attract a large number of electrons. It is measured in mA per volt. A control grid with high perveance will need very little positive charge to intercept electrons in large quantities and this leads to a high value of grid current.

AEI airflow base with chimney.
Grid Current
Because the input signal amplitude for Class AB is much greater than Class A, the increasing positive half of the input waveform moves the operation from Class A into the Class B region for high input signals. In Class AB operation the conduction angle is greater than for the Class B mode and values of greater than 180º are utilised. AB1 or AB2 are simply a means to define how much, if any, grid current will flow during the positive half cycle of the driving signal.
Why the push-pull amplifier is a poor choice
If the push-pull amplifier is a better design than a single ended type, why are there no push-pull amplifiers made for HF linear applications? Not one of the popular HF amplifiers using valves made today is a push-pull type, they are all single ended with one or more valves connected in parallel. The last HF amplifier design using push-pull I was able to find in a publication appeared in the ARRL Handbook before WWII and this was a Class C type for CW operation on 20m (a single band design) of fairly low power output using tetrode valves. The actual answer is that it is too complicated to arrange all the grid and anode switching in band switched HF push-pull amplifiers. The ever present possibility of instability with all the various wires and switches makes it a challenge to accomplish. Push-pull operation is best reserved for single band amplifiers.
In a push-pull amplifier not only is the balance critical to obtain stable operation, and to ensure each valve does its proper share of producing the correct power output, but there is also one other vital factor to consider. Each 4CX250 will require an anode load which is a pure resistance. In its data sheet Eimac states that a 4CX250 operated on an anode supply of 2kV (with a screen grid voltage of +350V) when driven to its full output power exhibits an anode resistance of 4kΩ. This means the tank circuit impedance of a push-pull amplifier at resonance is not 4kΩ but is in fact 8kΩ. The transformation ratio required to get from 8kΩ to 50Ω is hence 160:1 and that is becoming a little difficult to achieve. It also means that effectively the two valves are now connected in series as far as the tank circuit is concerned, so the peak-peak RF voltage across the anodes’ tuning capacitor plates is now double that of one valve. All these factors have to be somehow countered and when you compare the parallel to the push-pull circuit it is far easier to connect the valves in parallel. It eliminates the tricky balancing, ensuring that we have exactly 180º phase difference with exact amplitude balance, and greatly simplifies the matching networks, because the anode impedance is lower by a factor of four. Push-pull anode tank circuits also leave you with no choice but to use a coupling loop to extract the output power. These are difficult to get right when first commissioning an amplifier and never seem to couple equally between the two halves of the tank circuit. The original GW3ZTH push-pull amplifier used a Pawsey stub arrangement, which although it worked well when the valves were operated in Class C gave much reduced power when biased in Class AB1.
Richard Knadle, K2RIW, in his description of the 70cm amplifier using 4CX250s in parallel made these comments: “Most designers of transmitters for the higher frequencies have felt that push-pull was necessary in order to minimise the effects of tube and circuit capacitance. Except where a true resonant cavity or properly designed strip-lines are used, this is still true. In conventional coil and capacitor circuits especially, push-pull has a marked advantage over parallel on frequencies near the maximum at which these techniques can be used. But with the strip line, the inductance can be made as low as desired, simply by making the line wider.
“Any number of tubes can be put in parallel and resonated, so long as the intertube resonances (push-pull modes) can be controlled. In this amplifier the parallel grid and plate networks force the RF voltages on the two tubes to be identical. If one tube has higher emission than the other, it may draw slightly higher current, but this is of little consequence because it happens to be the condition under which the amplifier will produce the greatest output with this pair of tubes”.
A major problem of the push-pull circuit is the necessity of having both valves with very similar emissions and hence gain, ideally the two valves should be exactly the same but it is very rare to find two valves which are exactly identical. Out of a batch of, say, 1000 valves perhaps five or 10 pairs could be found which are very similar. You can purchase specially selected matched pairs of valves, which although not identical are close, but these tend to be more expensive than two arbitrarily chosen from a batch.
To pair up valves into almost identical emissions is a tedious and time consuming process, which you pay for in the increased cost. And there is no guarantee that the matching will still hold after a few hours of operation! Valve emission and transconductance matching is a static test comparing the anode current versus grid voltage and only a few points on the anode constant current curve are normally plotted. The constant current curves that Eimac and other manufacturers publish are the average of a large sample of valves and only represent average values. They are good enough for general designing but the result from two different valves will show some variance, even from valves from the same batch.
design of parallel connected anode network
In order to design a suitable anode network to transform from the valve anode to the antenna connection of 50Ω requires examining the valve data sheet to extract some facts. Fortunately the Eimac data for the 4CX250 is quite comprehensive and all the required parameters are tabulated. Other manufacturers (Mullard, STC, Siemens etc) also supply comprehensive data on the valve which agrees well with the Eimac data.
Firstly, we need to know the anode to ground capacity value (often quoted as output capacitance) and also the load resistance at the chosen operating condition. Eimac gives the anode capacitance as typically 4.5pF and the load resistance with an anode supply of 2kV at maximum rated output of 300W in Class AB1 is 4kΩ. For lower anode voltages the resistive load is lower, for example with 1.5kV it is 3kΩ and with 1kV anode voltage it is 2kΩ. All of these values are for operation in Class AB1 with a screen grid supply of +350V. There will be slight variations between valves but the differences are normally quite small. As long as the anode network has an adequate tuning range there is nothing to be concerned about in this variation.
The design starts by allowing some extra stray capacity between the anodes and ground as this will occur in practice. The ceramic chimney adds about 1pF to the anode capacity value and the proximity of the enclosure metalwork adds a little more. Eimac, as with all manufacturers, determines the capacity values in a special shielded fixture on a cold valve at a frequency of 1MHz, that is with no supply voltages applied. There is a very small variation when the valve is at operating temperature, but it is normally a percentage or so, so we can take the values as given.
The typical figures for the 4CX250 in grounded cathode operation are:
Output capacitance Ca 4.5pF
Input capacitance Cgk 15.7pF
Feedthrough capacitance Cag 0.04pF
The feedthrough capacity is very low because a tetrode valve has an inherent internal barrier to return signals from the anode to the control grid, due to the screen grid acting as a sort of grounded grid. What is not obvious from the Eimac data sheet at a cursory glance is the actual value of the feedthrough capacitance, the 0.04pF figure is for an ungrounded screen grid, but Eimac gives the correct value when it is operated with a grounded screen grid of 0.01pF, i.e. when it is mounted in an SK-600 type socket. By contrast, a similar rated triode valve will have a value for Cag of a much greater value, perhaps as much as 10pF. Hence, to ensure stability at high frequencies it is usually necessary to operate it in grounded grid configuration to reduce the feedthrough capacitance. The alternative way of cancelling out the inherent feedthrough signal in a triode is to apply external neutralisation components.
Paralleling valves
Paralleling two valves doubles the anode to ground capacity and halves the anode load resistance, so the values we will be working with are Ca = 2 x 4.5pF + strays and a value of 12pF will normally cater for this. The resistive load will be approximately 2kΩ at maximum output power. To transform from the 2kΩ anode load down to 50Ω is a transformation ratio of (2000 / 50) = 40:1, which is quite a large jump in impedance for normal networks to achieve with minimum loss in the network. We can, however, utilise the characteristics of a shortened quarter wave transmission line to assist with this problem.
A quarter wave line when shorted at one end behaves exactly the same as a parallel resonant tuned circuit and exhibits an impedance which is purely resistive and an infinite value. When the length is shorter than 90º (less than λ/4) the line appears as an inductive reactance and when the line is longer than 90º (more than λ/4) it appears as capacitive reactance. To bring a line which is shorter than λ/4 to resonance needs a shunt capacitor to be added. By having the anode connected at one end, which has an inherent output capacitance to ground plus the tuning capacitor, the line can be brought to parallel resonance by adjusting the length of the line by positioning the shorting point to ground. For a particular impedance line of a known electrical length it is possible to calculate the electrical length in degrees and hence the physical length required.
This means we only need to measure physical dimensions and to make the line from some suitable strip metal of high conductivity. The highest conducting material is silver, but this would be far too expensive. The next best material is copper, which is also expensive and would react violently with the aluminium metalwork due to the great dissimilarity in electrolytic potential, causing rapid corrosion of the aluminium. The preferred material is aluminium as it is highly conductive, only a little inferior to copper, does not suffer from electrolytic corrosion problems when in contact with the aluminium metalwork, relatively inexpensive and available in a wide variety of standard profiles and thickness. Brass is another possible choice being slightly inferior to aluminium in conductivity, but brass is a copper / zinc alloy and also suffers from severe electrolytic corrosion problems with aluminium, and it is more expensive. For this amplifier design a 3mm thick strip of aluminium is required, which can be sheared from a larger plate using a guillotine.
Strip Line transmission lines
A strip line is a rectangular conductor suspended an equal distance between two conducting grounded plates of greater width. The dielectric is air, which has a very low loss. It is also commonly known as ‘Tri-Plate’. To employ a true strip line means that the bottom plate and the top plate of the anode compartment need to be the same distance from the line, which is inconvenient as it limits the mechanical construction. A variation is often used where the top plate is omitted, or placed a much greater distance away from the line so its effect is minimised. This is called Micro Strip (Fig 16.1) and it is commonly used for printed circuit fabrication. It can also be utilised for air dielectric lines.

Fig 16.1: Strip Line and Micro Strip Line details.
Examining the physical dimensions of the 4CX250 valve shows that if it is mounted vertically on a flat panel in the normal SK-600 airflow base the middle of the anode cooler ring is approximately 25mm above the ground plane surface. This is quite handy as we can use a suspended line running parallel to the ground plane surface at about the same height.
To determine the exact height and width we need to look at the properties of a parallel line over an infinite ground plane surface. The simplest way is to examine a chart (Fig 16.2).

Fig 16.2: Chart of strip line impedance versus d and W.
Examining the graphs we can determine what width line is required for a particular impedance with a known spacing. The value of d/W was derived to lie in the region of 0.35 to 0.4 with a sensible width of line. As a first stab at deriving the line physical length a value for d/W of 0.385 was chosen as this gives an impedance of 80Ω. Terman has shown that the impedance of a strip line of 77Ω has the lowest loss per unit length and deviating away from this ideal case introduces some extra loss in tank circuit efficiency. However, the increased loss is normally quite small and can be overlooked for a non-critical design. The exact impedance used is not therefore very critical as long as the length of the line can be varied and the anode tuning capacitor has sufficient range to bring the network to resonance.
Armed with these facts the network was built on a software analysis program from Compact Software® and the software was used to iterate through various practical values to find a perfect match. This is determined by assigning the values of load resistance and anode capacitance connected to ground on one end of a transmission line whilst looking into the other end of the line through the tap point where the 50Ω output will be. Limits were set for the value of electrical length of line to be not greater than 90º and not less than 20º, and the anode tuning and loading capacitors values were limited to practical values, to force the software to work around these values. From past experience the values chosen were judged to be realistic.
The bare bones of the matching network is shown in Fig 16.3. The anode tuning capacitor is moved away from the anode end to a point beyond the DC blocking capacitor, so the tuning capacitor doesn’t have any high DC voltage on it. This means it is tapped down the line and to obtain the same frequency variation in the tuning means the capacitance needs to be greater than a tuning capacitor at the anode end of the line. The short section of line between the anodes and the blocking capacitor is very short, just long enough to include the DC blocking components and to cater for the anode cooler clamps to attach the valves to the beginning of the line, in practice it is about 35mm from the DC block to the centre of the anodes.

Fig 16.3: Equivalent circuit of anode network.
The DC blocking capacitor can be placed anywhere convenient along the line. It is preferable to have Cb close to the anode as then the RF current flowing is low, because the impedance at the anodes is the highest. If the DC block were placed much closer to the grounded end the RF current would be far higher. As we recall, the transformation ratio from the anode load of 2kΩ to 50Ω is 40:1, the RF current at the anode is about 16% of the current at the 50Ω point, assuming the line has zero loss. At 1kW output this is only ~0.7A.
At an operating frequency of 145MHz the free space wavelength is 2.068m and hence a quarter wavelength is 517.24mm. The guided wavelength in a conducting material is slightly shorter but not so much to cause a problem as the length can be readily adjusted to suit the application. The total length of the line from the grounded end to the centre of the anodes is only ~45º in electrical length (λ/8) and not a true quarter wavelength of 90º, because the anode shunt capacity is high. As you move along the line from the valve anodes towards the grounded end the RF voltage becomes progressively lower and the current increases. The exact tapping point for the output was initially estimated and allowed to float within a narrow range of dimension, as it was known from experience that the value was going to be about 1/5th of the length away from the shorted end. The software analysis program can work either in electrical length in degrees or the physical length and after some intitial iterations to home in on the critical factors it was changed to physical lengths as it was easier to relate to than electrical length.
The components CA and RA represent the anode capacity and the effective anode load resistance at the operating level desired. (CA includes the added stray capacitance.) The inclusion in the simulation circuit of the anode DC feed choke (RFC) and its associated decoupling capacitor CD complete the network. Note: the value of RFC and CD does have a marked effect on the impedance seen at the valve anodes: without this component the analysis is not correct. The total anode capacitance when the choke is included needs to be higher than without it because the inductive reactance cancels part of the capacitance and to compensate the anode tuning capaitor needs to be larger to correct this extra inductance.
Anode Choke
At resonance the AC voltage across RFC is very high, typically 3.2kV peak-peak when the anode DC supply is 2kV, and this causes a current to flow to ground through this component. Normally the value of RFC is chosen so that the reactance of the inductor is at least five times the anode load at resonance. This implies that the RFC needs a reactance of at least 10kΩ, which equates to rather a large value in µH, and hence a large number of turns. The danger is that there may be a spurious resonance which could cause the choke to burn up. But as the anode to ground capacity is high this same capacity appears across RFC and we can select the value so that RFC is broadly parallel resonant at a frequency somewhat below the operating frequency. In this mode the choke is still inductive as it hasn’t passed through its natural resonant frequency. Eimac issued a useful engineering bulletin on choke selection parameters which highlights this problem. If the parallel resonant dynamic resistance is chosen correctly, it will be many times the anode load resistance, be insignificant, and so can be discounted in the analysis. Part of the analysis was concerned with adjusting the value of RFC to minimise its effect.
The final choice of the line impedance was selected to be ~100Ω as with a lower Z the line becomes physically too long and too wide. By increasing the Z of the line, which means a narrower line, the required physical length decreases considerably. The final length from the centre line of the 4CX250 anodes to the shorted end is 220mm, which gives a nice compact unit. This allowed a first approximation of the length of the anode compartment to be of the order of 300mm. The width of the line with the height above the ground plane is only 60mm wide. For an 80Ω impedance line the width is over 80mm wide and the length 325mm in total length, which makes the anode box much larger. In simple terms “less is more”.
The curves assume that W is much greater than d, over an infinite ground plane, but the practical considerations of designing a suitable compartment to fit the valves into and allow adequate clearances dictated a width of the panel to be about 180mm. So the line is not over an infinite ground plane but somewhere in the middle of the possible range. The curves can only be considered as a good estimate with reasonable accuracy. If you wanted to measure the exact value of Z an infinitely long section of line suspended over an infinite width ground plane could be constructed and then measured, but that is pie in the sky for most constructors!
The equivalent simplified lumped circuit of the anode network is shown in Fig 16.4. The transmission line equates to a low value inductor L with the output tapped near the grounded end.
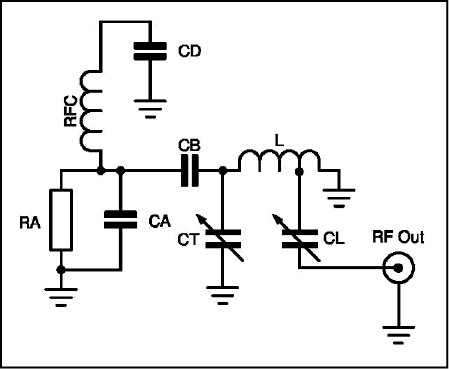
Fig 16.4: Lumped circuit equivalent.
Anode dc blocking capacitor
For safe operation it is necessary to form a DC block between the anodes and the grounded end of the line. This is performed by a very low loss PTFE sandwich capacitor made from two flat plates of 3mm thick aluminium with a piece of 0.25mm (10-thou) PTFE sheet between them. Using the Compact Software program one can easily vary the value of CB to see the effect it has on the matching network. In fact any value greater than about 100pF has virtually no effect: 100pF at 144MHz is a reactance of 11Ω which when compared with the anode load of 2kΩ is insignificant. Smaller values of CB require a little more anode tuning capacitor value than larger values of CB. But the difference is only a picofarad or so. The network will tune the full 2m band and then some. In fact it was found that by just varying the values of CT1 / CT2 and Cload it would tune from 135MHz up to 155MHz with a perfect match to 50Ω. With the blocking capacitor dimensions as defined the capacitor value is over 300pF. The width of the plates is largely determined by the centre to centre spacing of the two valves. The airflow bases have an outside diameter of 72mm so it is not possible to place the valves closer than this dimension. A spacing of 75mm was chosen which allows some wiggle room as the holes in the base plate for the SK-600 sockets are 57mm in diameter to take the bases, which are 55mm in diameter. They can be made slightly larger to allow accurate alignment without placing any stress on the ceramic-metal seals.
Anode tuning capacitors
The anode fine tuning is performed by two dielectric vanes, with no contacts to worry about. The bulk of the anode line capacitance is provided by a disc tuning capacitor which is locked once the optimum setting is found. The extra capacitance required to bring the line to resonance is provided by the fine tuning vanes. The disc tuning capacitor is a 38mm diameter ‘penny on a stick’ type capacitor working against the bottom plate and it is attached to the underside of the anode line close to the blocking capacitor. The shaft for this capacitor is formed from a short piece of M4 studding or a long M4 screw and the disc is attached by a M4 lock nut.
It is important to use a balanced tuning scheme as if only one capacitor were used on one side of the line some field disturbance would occur and the network losses increase. The moving vanes are attached to an insulated rod that runs from the front panel to the back panel and which is mounted above the line. The cross sectional drawing (Fig 16.5) shows the general arrangement. Because there is no DC high voltage on the part of the line where the tuning capacitors are attached they only have the RF signal to cater for. At full output the peak RF voltage will be around 3.2kV peak-peak with a 2kV anode supply.

Fig 16.5: Cross section of the amplifier anode compartment (K2RIW airflow method shown).
The two fine tuning vanes are made from 1.6mm thick glass fibre printed circuit board with the copper removed and a bushing to suit the cross shaft. Without the vane between the capacitor plates the dielectric is air which has a dielectric constant of 1. The presence of the vane increases the dielectric constant by a factor of over 2:1, hence the capacitance rises with the dielectric between the plates. (Fibre-glass board has a dielectric constant of about 4.5 that of air. If the gap between the capacitor plates were completely filled with the dielectric the capacitance would rise by this amount. As the gap between the two plates is greater than the vane thickness the increase is a little lower.) By adjusting the gap between the capacitor plates the rate of change and the maximum value can be controlled to cover the 2m band with some extra if need be.
This shaft can be any suitable stiff insulating material such as tufnol, paxolin or glass fibre of about 6mm in diameter. The front end of the shaft passes through a bushing, a potentiometer shaft bushing would be suitable, broken off a redundant pot, and the rear of the shaft simply passes through a hole drilled in the back panel. A circular disc at the rear end with some draught excluder rubber cut as a large washer is glued on to the inside of the anode compartment to form a friction brake, so the shaft stays at the place it was adjusted. The anode fine tuning capacitor consists of two vertical metal tabs that are both bent from 2mm thick aluminium sheet into a right-angled bracket. One half is bolted to the anode line and the other is taller and bolts to the bottom plate, so the vanes move in the gap between them. The two-grounded brackets require slotted holes in the bottom plate so their positions can be adjusted when setting the amplifier up. The vanes can be slid along the shaft and then locked in place with grub screws, so as to centralise them in the gaps to obtain equal spacing between the two tabs of the capacitor. The end of the vane is radiused and adjusting this radius sets the end stops, on the top cover and the base plate. Adjustment is fine and predictable. Setting the two stator tabs the correct distance apart sets the maximum capacitance when the vane is fully inserted. Both sides should be the same distance apart to preserve symmetry in the RF field.
The total tuning capacitor value required is about 5.1pF for mid-band of 145MHz and 5.25pF for 144MHz, so the variation is very small. The central disc capacitor provides about two-thirds of the total required and the two dielectric vanes provide the remainder. (As there are two tuning capacitors in parallel each one supplies half the required capacitance.) If the tuning capacitor was at the anode, and not someway nearer the grounded end, the value would be much less (about 1.5pF required) and a smaller variation, which is impractical to achieve. In a correctly proportioned anode network, when the anode tuning is swung through resonance, observed on a spectrum analyser, the output power reaches a peak and the harmonics dip to a very low value. This is one of the most sensitive ways of telling if the tank circuit is truly resonant and correctly proportioned.
Output coupling
In many other designs the output is taken via a coupling loop which needs to be moved in relation to the tuned line to find the correct position. This is a tedious operation and may entail some hazards if performed with the amplifier powered up. It was considered one of the worst aspects of the alternative designs and not one to be employed.
The output tap on the anode line is fixed at 40mm from the grounded end; this should be the optimum tapping point for a 50Ω load. The grounded end of the shortened transmission line carries a very high RF current and it needs to provide a very low resistance contact to the bottom plate. (Calculations show that at the 1kW output level the RF current to ground at the shorted end is of the order of 40A.) Three M4 screws pass through the line and are tapped into the shorting block on the bottom and the top of the line. Alternatively, a longer M4 bolt can pass through the anode plate, the shorting block and the bottom plate, and nuts could be used to clamp the assembly together. The metal surfaces should be clean and shiny, without any burrs, before clamping the end down. The tap point is made in the centre of the line, to preserve the symmetry of the current flowing in the line, and this can be a solder tag with a screw and a piece of stiff wire soldered to it. This passes through the bottom plate via a PTFE insulating bush and attaches to one side of the variable loading capacitor. This capacitor must be mounted on an insulating bracket and the control shaft must also be of an insulating material, same as the anode-tuning shaft. The nominal value when resonated into a 50Ω load will be about 22pF, so a 35pF maximum capacitor should be suitable. This capacitor also carries a high RF current, so a good quality, low loss, air variable is required. At 1kW output the current in 50Ω is 4.5A.
The end of the line closest to the DC blocking capacitor is supported on two 12mm diameter insulated pillars the same height as the shorting block so the line is parallel to the base plate. The line has two holes in it and an M4 screw is used in a tapped hole on each end of the pillar. An alternative attachment is a tubular pillar with a nylon screw passing through the line, pillar and the base plate with a nut on the top or bottom. The selection of the material for the insulating pillar should take into account that this is a portion of the line with a high RF voltage to ground as it is adjacent to the tuning capacitor tabs. PTFE, PEEK, tufnol, paxolin, fibreglass or a ceramic (steatite) pillar would be a good choice.
Cooling choices and anode compartment design
Cooling of the valves will depend on the choice of how the air is to be blown through them. Conventional cooling with the airflow bases can be by pressurising the lower compartment which houses the grid input network, or by the K2RIW method that dispenses with the usual ceramic chimneys and pressurises the anode compartment. If blowing into the grid compartment the resistance to airflow through the base is much higher and requires a blower with sufficient airflow against the high backpressure. This method requires the SK-606 ceramic chimneys. With this arrangement the top cover can be a perforated metal sheet, but if the anode compartment is pressurised it must be a solid sheet with two holes to allow the PTFE chimneys to vent the hot air. The second method offers much less resistance to the air-flow, does not require the expensive SK-606 chimneys and offers better cooling if the blower is marginal in providing sufficient volume against a high backpressure – it is also much quieter! A further advantage of pressurising the anode compartment is that a lot of air will flow all over the anode line and this increases the cooling by a significant amount. The choice will determine which compartment requires the cut out for the blower in the rear panel. No matter which compartment is pressurised it will require a suitable conducting mesh to prevent signal leakage where the hole for the blower is cut out.
Airflow and the Blower
In the data sheet for the 4CX250 valve Eimac gives data for the volume of cooling air required. At the full anode dissipation of 250W it requires a minimum of 6.4 cubic feet per minute at sea level and the backpressure across the socket and air cooler is given as 0.82-inches of water gauge. For two valves the volume required doubles, so the need is for a blower that can supply at least 12.8 cubic feet per minute at the pressure of 0.82 inches of water gauge. To allow for some possible additional restriction a pressure of ~1-inch water gauge would be prudent. 1 cu ft/min = 28.32 litres per minute, and so the volume required is 362.5 l/min: the blower must be able to supply at least this amount of air. The pressure converted from inches of water to metric units is 0.204 kPa. It is prudent to select a blower which has a little reserve capacity, to cater for any leakage, and so choosing one with at least
400 l/min is wise. To move this volume of air against the backpressure requires quite a powerful motor, about 1/6th horse-power is needed. This requires a 125W motor, which on an AC supply of 230V will draw about 0.5A, so the motor is quite large.
Anode line and box details
The anode transmission line is fabricated from aluminium plate and angle and isn’t particularly critical as far as dimensions go, a millimetre here or there isn’t going to stop the amplifier tuning up, it will just need slightly different capacitor settings. Similarly there is no reason the anode and grid compartments cannot be changed in size if it suits the constructor, as long as the anode circuit is kept the same. The internal height is shown as 80mm but it could also be 90mm or 100mm without affecting the operation. All the flat sheets are made the same size of 300mm x 180mm and they all have the same pattern of holes around the edges for screws to attach them to the upper and lower compartment sides. If using the K2RIW cooling system, then after the middle plate is marked out and the holes centre punched, clamp two of the sheets together so they are lined up and drill all the necessary holes. This ensures the holes for the bases and the top cover air exit holes are correctly lined up. Separate the two and mark the top cover so it can be identified later and then clamp the bottom cover – which has no holes except the screws around the edges – and spot through with the drill and then deburr all the holes. Open up the holes for the airflow bases and the top cover air exit holes to suit the chimneys. Fit a piece of metal gauze over the two air exit holes to prevent RF radiation but allow a free flow of air.
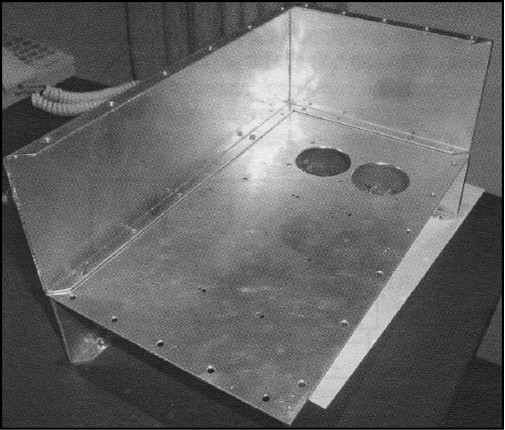
A set of metalwork for the 2m dual valve amplifier showing the fabrication method.
The top and bottom sides are best made as two L-shaped pieces with the flanges bent up as a pair. The flanges on the side plates for the covers should allow plenty of material for the fixing screws, a dimension of 12mm will satisfy most requirements. Temporarily bolt one pair together to make a rectangular box for the anode compartment and place the middle plate on it, carefully line it up and spot through all the fixing screws around the edges. Repeat for the bottom flange and then deburr all the holes. It is best to fit pressed inserts to take machine screws for the top and bottom covers rather than using self-tapping screws. The middle plate is sandwiched between the top and bottom compartment with screws that pass through all the pieces with normal nuts and washers well tightened. These holes can be made slightly larger to allow correct alignment when the screws are fitted.
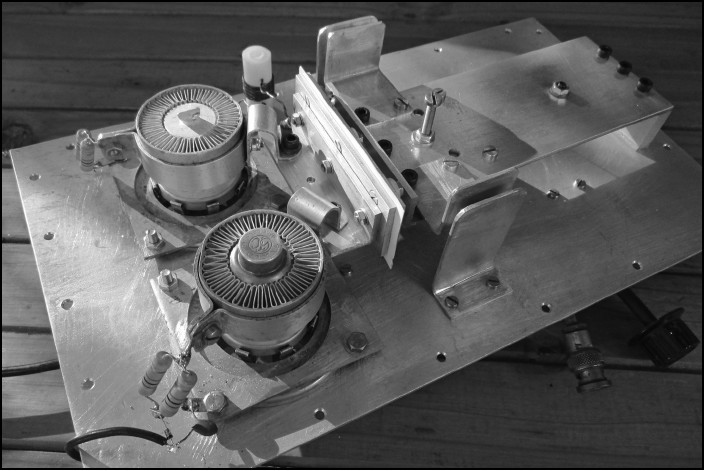
A view of the anode end of the line showing the anode clamps and straps.
An alternative method of construction is to use plain flat sheets and angle stock with plenty of screws to ensure an RF tight compartment. But a professionally folded up box just looks better than a Heath Robinson job with screws everywhere. Using the L-shaped panels is a boon whilst constructing an amplifier as one half can be removed allowing free access to the parts when wiring up the internal bits, especially when it comes to drilling extra holes to mount additional items in the boxes or fitting connectors etc.
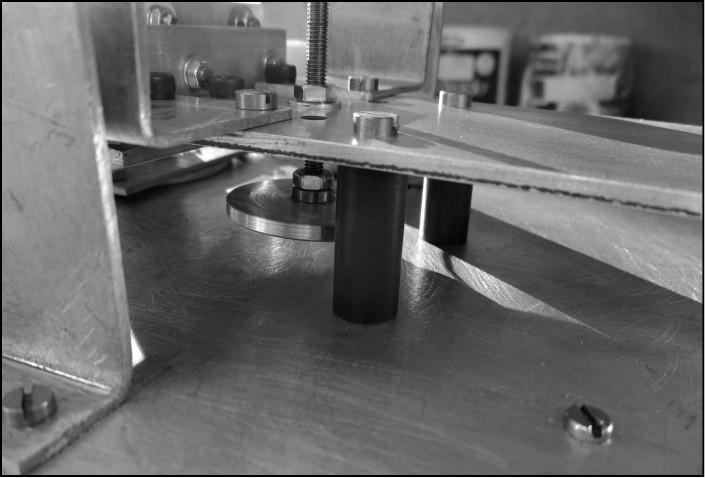
View under the anode line showing the coarse tuning capacitor.
The depth of the bottom compartment is not critical, it simply needs to have sufficient depth to clear the grid network components and other items that need to be housed under the middle plate. The output loading capacitor, a suitable meter on the front panel, an antenna relay and possibly other relays, heater transformer and a screen stabiliser board could be housed in this largely empty space. A depth of 60mm to 80mm should cater for most needs. If the K2RIW cooling method is chosen some of the air will spill back through the airflow bases and help to keep the grid and cathode pins cool, but there must be an exit for this air in one wall of the compartment. A hole about 25mm diameter or several holes of 6mm diameter drilled in a pattern to allow the air to escape would be suitable. If the normal pressurised grid compartment is chosen the depth will be largely determined by the inlet hole the blower needs.
The coarse anode tuning screw is behind the blocking capacitor section and is a 50mm M4 cheesehead screw. The anode load resistors are also shown connected to the two anode clamps to load the line during the testing. The anode linking straps provide a semi-flexible connection between the valves and the blocking capacitor. The HT feed from the RFC connects to the anode clamp of the nearest valve via a solder tag. No ceramic chimneys are required for this version as the cooling air uses the K2RIW method where the air is fed into the anode compartment.
Choice of screen grid voltage
There is a choice of screen grid voltage to be used in a tetrode valve. In their data sheet Eimac gives the dynamic parameters for a Class AB1 amplifier at a screen grid voltage of +350V, though it is preferable to use a lower screen grid voltage for some applications. The screen grid voltage has an effect on the conductance of a tetrode (gm), its gain figure, and also defines the g1 bias voltage required for a particular idle current. If the screen grid voltage is lowered the grid bias voltage also needs to be lowered to bring the anode no signal current back to the required level. Eimac gives the grid bias voltage as –55V when the anode supply is 2kV and the screen is at +350V. This develops an idle anode current of 100mA. Eimac states in an engineering bulletin: “It has been established from many tests that a ‘zero signal plate current’ (idle or quiescent current) of ~100mA per valve is the optimum for operation in Class AB1 for single sideband duty for lowest IMD generation. In a two-valve amplifier it means the idle current should be ~200mA when no drive is applied.”
At an off load anode voltage of 2.2kV, which is fairly typical for a power supply rated at 2kV at full load, the anode dissipation per valve is 220W, which is almost the total allowed anode dissipation of 250W. Eimac states that the idle current should be 100mA, no matter what the anode supply voltage is: they give figures for 1kV, 1.5kV and 2kV, all showing that 100mA is the optimum value. What does vary is the anode load value and the power output. The typical values are 120W, 215W and 300W for the different anode supply voltages and the load resistance varies from 2kΩ, 3kΩ and 4kΩ for the same anode voltages.
Lowering the screen grid voltage to +250V allows an additional 200V peak-to-peak anode voltage swing. Since it is the peak-peak anode voltage swing that defines the output power when transformed down to 50Ω, a higher voltage swing translates into more output power.
The one downside of this approach is that the valve needs to be driven harder to obtain the same peak anode current, because the conductance is lower with a lower screen grid voltage, but the difference in drive power is small. The linearity also suffers, so it is not recommended for single sideband operation if you want the best IMD figures, but for CW and FM it is a useful way of getting a bit more power output. As most 2m transmitters have far more power than required to drive a 4CX250B to full output (typically only 3W per valve) we often need to lose most of this drive power in grid damping resistors. The grid network design takes this into account.
There are two benefits achieved by using heavy damping. Firstly, the load seen by the driver stage is much more constant; equating to a low SWR across the complete range of drive power, and the stability of the valve is also greatly increased. In the W1SL and similar push-pull amplifiers the grid-tuned circuit is very high impedance and the small but significant feedthrough capacitance of the valves causes a relatively large RF voltage from the anodes to appear across the grids. If not countered by neutralising this can cause the amplifier to become unstable. The other factor is that the transformation from the 50Ω input up to the grids is very large, so just a few watts of drive develop a high driving voltage. This means that relatively low power is needed to drive the valves into saturation and often some sort of attenuator is required to reduce the drive level into the grids. Many push-pull amplifiers using the 4CX250 series need cross-coupled neutralising capacitors between each anode and the opposite grid terminal. These are a nuisance and take a lot of effort to get them properly adjusted.
Operation on CW and FM
Using SSB, the average power input is only about 30 to 40% of the peak power input. This translates into lower anode dissipation as the valve has time to get rid of the heat generated. However, using a continuous carrier such as on FM, means the valves are working at 100% duty cycle and hence dissipating a much higher power. To offset this it is prudent to reduce the screen grid voltage so the anode current cannot be driven as high as when SSB operation is required. A switching method to drop the screen grid voltage from +350V to +250V is beneficial, as linearity isn’t necessary for CW and FM operation. It also often means we wish to reduce the peak anode current, and hence the output power to some lower value. By simply switching the screen grid supply to a lower voltage and leaving the grid1 bias voltage at the SSB operating level means that the idle current is reduced, as is the gain, and this is a simple way of reducing the power output when linearity is not essential.
A suitable screen stabiliser with excellent regulation and the switching to alter the screen grid voltage is shown later.
Grid network
The grid-tuned circuits are very simple to construct and to adjust. The tuning is stable across quite a large portion of the 2m band (144 to 146MHz) and it hardly ever needs to be adjusted except after large frequency excursions. If adjusted to 144.5MHz the input SWR is better than 1.5:1 across 1MHz of bandwidth.
The grid network shown in Fig 16.6 uses a simple L-match network to transform from the 50Ω driver up to the higher impedance of the valve grids. (Although the network looks like a simple L-match in fact it isn’t. In a normal L-match the end of the network with the highest impedance has the capacitor to ground fitted. The high grid capacity of the valves converts the network into a modified version of a pi network with a step up in impedance.) The voltage applied to the grids is consequently much higher than the voltage at the 50Ω input so the grid voltage swing is higher. The exact step up in voltage is about 4:1 when the shunt grid-cathode impedance is taken into account. 10W in 50Ω is an RMS voltage of 22V, so at the grids it transforms into about 70V peak as the drive power is shared equally between each valve. With a grid bias setting of –55V, this is enough to start driving the valves into grid current.
The design of a parallel amplifier is much easier than a push-pull type. In the push-pull amplifier you not only have to ensure that each grid has an equal amplitude signal but is also exactly 180º out of phase, which is not a trivial exercise to achieve. An error of as little of ±1º can have a profound effect. Similarly, an error of ±2% imbalance has a similar effect.
The component values shown in Fig 16.6 are the computed values for resonance at mid-band, 145MHz. Each valve grid is fed via a series variable capacitor to allow setting equal amplitude of excitation. These are adjusted whilst observing the grid current in each valve to obtain the same current. The input passes via a series capacitor of 6p8 to the L-match components; this capacitor serves as an impedance transformer and an additional DC block. This capacitor could also be a small value trimmer capacitor and this is recommended if the best input match is desired. A Philips beehive trimmer of 10pF would be the best choice.

Fig 16.6: Grid tuning network.
Whilst adjusting the prototype amplifier grid network a diode probe was initially used to measure the grid voltage of each valve, after adjusting the tuning for lowest VSWR. Although the diode probe upsets the tuning when touched on each grid pin the RF voltage measured confirmed the matching was working as the simulation predicted with a step up in RF voltage from the input of about 3:1. The diode probe is a peak reading device and with 10W applied to the input a voltage of ~55V was measured at each grid. This measurement was performed with a cold valve; no heater supply was used initially. Later tests with the heaters powered up were made by measuring the grid voltages, as are detailed later.
Each valve has a low value non-inductive resistor in shunt to the grid bias supply with a 1nF feed through capacitor to decouple each leg. The trimmer capacitors in series with each valve allow adjustment of the drive amplitude and these can be 30 to 40pF trimmers with a DC withstand rating of 100V or more. Philips beehive trimmers are the best choice if available. This network is ‘S & F’ type (Set and Forget). It hardly warrants a tuning capacitor knob on the front panel and an access hole on the front or rear panel allows a trimming tool to adjust it if required. The series inductance is nominally 135nH, this at 145MHz has a reactance of 123Ω.
The schematic in Fig 16.6 shows a simplified version of the actual circuit. In practice there are two other small value inductors not shown. These are in series with each grid balancing capacitor and are formed by the length of 1.6mm wire which supplies the capacitors from the centre point. Although these inductors are a low value, with the inherent grid-cathode capacitance of 16pF for each valve they do have some effect but are tuned out by the series capacitors.
The grid swamping resistors absorb most of the excess drive and these need to be adequately rated for the drive power. 2W Allan Bradley carbon composition resistors are suitable but other types may need paralleling of several resistors to attain the correct value, say 3 x 1k5 1W metal film resistors with short leads. Although metal film resistors are more inductive they are still quite low and when several are paralleled the inductance drops. The inductance is in any case swamped by the large grid-cathode value of 16pF in each valve. If the air from the blower is applied to the grid compartment they will receive plenty of cool air and they can dissipate much greater power. With the values shown a drive power of 10 to 15W will drive the amplifier hard into saturation and ALC should be used to back off the drive to prevent over driving. This is simple to arrange with a rectifier circuit connected across the output and set to develop –9V at the required output power. When fed back to the transmitter this ALC voltage controls the transmitter low power stages to decrease the drive level. With a true Class AB1 amplifier, there should never be any significant grid current measurable so trying to obtain ALC from this source is doomed to failure!
Setting the anode and grid networks
This is the biggest problem most amateurs experience when first commissioning an amplifier. Attempting to make adjustments when the high voltage and the blower are running is not only dangerous but traumatic. However, there is a safe and relaxed way of checking the networks will tune without any nasty voltages. In fact for the anode network, you do not need any power supplies at all. This is the way the anode network was analysed using the computer software but we are going to need some test equipment. Fortunately, you probably already have everything you will need: a low power 2m transmitter, a DC voltmeter and an SWR meter. You also need some low inductance resistors to simulate the anode load resistance. The basic circuit is shown in Fig 16.7.
The schematic shows the connection details. The important parts are the capacitor CA and the load resistors connected from the anode to ground. In the example, the predicted anode load is ~2kΩ. We already have the capacitor CA in circuit when the valves are plugged in. The RFC shown connected from the anode to ground is the high voltage feed choke which is decoupled to ground by CD and so is in shunt with the anode to ground.
Fig 16.7: Test set up for adjusting anode network.

All that needs to be done is to make up a suitable anode resistor load of ~2kΩ and connect the rectifier diode and the 56Ω resistor. This should have short leads and can be made up of 1W or 2W rating resistors in parallel, two 3k9Ω resistors would be close enough, or four resistors of 8k2Ω (with two resistors paralleled in each half) from the anode clamps to the base clamping screws with solder tags temporarily attached between the anodes and ground with very short leads. The 56Ω resistor dissipates very little power and a 1/4W or 1/2W resistor will suffice. Connect a low power 2m transmitter to the antenna connector with a SWR meter in series to monitor the forward and reflected power. What we are going to do is a
1-port measurement and it is identical to checking the SWR of an antenna. If you have an antenna analyser you can obtain the same result except an antenna analyser only delivers a mW or so, so do not expect to see any detected anode voltage. It is possible to obtain a perfect match but there is no guarantee that the anode resonates with maximum peak voltage, so the SWR meter method is better.
Adjust the coarse tuning capacitor so it is ~3mm above the bottom plate and tighten the lock nut. Set the gaps between the two fine tuning capacitors to 4mm. Connect a DC voltmeter to measure the rectified RF voltage. Apply a small amount of 2m drive at 146MHz, about 2W is OK, and set the SWR meter to full scale on the forward range and then switch to reflected power. Swing the anode tuning vanes through its full range and look for a peak in the detected DC voltage. Adjust the anode coarse tuning to obtain maximum voltage when the vanes are about one third in mesh and then check the SWR reading. Adjust the output loading capacitor to obtain minimum SWR. It should dip to a very low value.
Change the transmitter frequency to 144MHz and check where the fine tuning vanes need to be for maximum anode RF voltage. They should be close to fully meshed. Make a small adjustment to the coarse and fine tuning to obtain this condition.
The spacing between the two anode capacitor plates may need adjusting so that the anode detected voltage rises to a peak when about half to three quarters of the vane is inserted in the gaps at 144MHz. If the gaps are changed move the tuning vanes so they are in the middle of the gap. Moving the plates closer increases the capacitance.
What we are trying to ascertain is that the RF detected voltage rises to a peak at the same time as the SWR is the lowest. The anode tuning and the output coupling capacitor will inter-react as you adjust one or the other, but it should be possible to achieve the correct result: maximum indicated RF voltage with minimum reflected power. If so, it has proved the anode network will tune correctly and you can carry on and finish the rest of the wiring etc to complete the amplifier. You can place the top cover on the anode compartment and press down firmly so it makes good contact and check how much reaction occurs. Note where the two capacitor knobs need to be to get the perfect result. When finally doing the real tests with everything powered up you can set the controls to these as a starting point.
Adjusting the grid network
The grid network uses the same principle but this time we could use the grid currents to see the peak in the drive. There is, however, a simpler method which also allows a perfect balance to be achieved using just a DC voltmeter. Fig 16.8 shows the method.
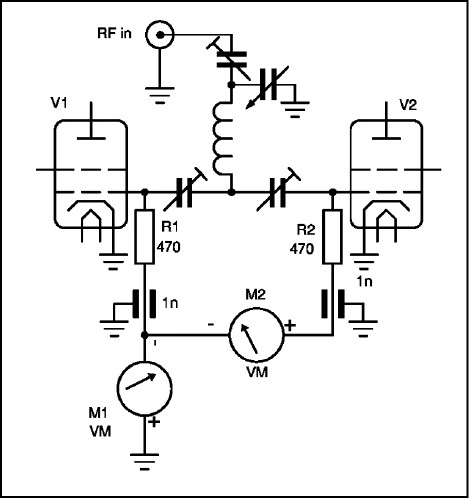
Fig 16.8: Grid drive measuring method.
Connect the SWR meter and the 2m transmitter set to 145MHz to the input and power up the filaments. You will need to blow some air on to the bottom of the valve bases to keep them cool even with just the filaments activated, so rig up a small fan and blow some air into the grid compartment. Remove the wire link between the grid1 feedthrough capacitors so they are separated. Connect a voltmeter (M1) between one of the grid bias feedthrough capacitors and ground and apply a small amount of drive, not more than 5W or so. Adjust the grid input tuning capacitors to maximise the grid voltage, this will show a negative DC voltage as the grid-cathode junction acts as a rectifier diode to large voltages.
The voltage indicated is the actual peak grid voltage the amplifier will experience when driven. On the prototype amplifier a drive power of 10W produced a grid voltage of about –80V. As the bias point for Class AB1 is about –55V, the 10W drive produces a voltage well above the grid current point and will drive the valves hard into saturation at this drive level.
Move the meter probes so that the meter is now connected between the two grid decoupling capacitors, as shown by meter M2. The voltage indicated is the imbalance between the two grids. Adjust the two series grid capacitors to achieve zero voltage and then measure the input SWR. Slight adjustments may be needed to the inductor value, by stretching or squeezing the turns, as well as adjusting the input tuning capacitor and the trimmers to get the grid voltage peak and the minimum SWR to coincide. Change frequency to 144MHz and then to 146MHz and ensure the grid tuning will cover these extremes with a low SWR.
Don’t be too concerned if the SWR isn’t 1:1, as long as it is reasonable it is OK. Any 2m transmitter that is worth its salt shouldn’t be too fussy about a bit of SWR. If it is very high find out why and correct the error. When the final tune up is done with all the voltages connected and you tune for ‘maximum smoke’ at the output minor adjustments will also be necessary, so don’t waste too much time getting it perfect for now. All we are concerned with is the ability to tune with reasonable settings.

Prototype amplifier grid circuit.
The decoupling capacitors’ mounting bracket is bent from 1.6mm aluminium sheet and uses two of the 4mm airflow base clamping screws to attach it to the middle plate. The feed through capacitors are PTFE insulators with 1nF / 1kV disc ceramic capacitors. The input capacitor is a Philips beehive type of 10pF maximum value. The screen grid MOV was not fitted when this picture was taken.
When all the adjustments are done remove the bits added to ensure you don’t switch on with the anode resistors in place: they will vaporise if the high voltage is applied and won’t do the power supply any good!
Screen grid shunt stabiliser
More than anything else, the screen grid supply is the most critical part of the power supply to get right. Because of the peculiar traits of the 4CX series, it requires a stabiliser circuit that can supply a very well regulated voltage. It must be able to supply the necessary current, but it also needs to be able to sink screen current that the valves generate. This is the so-called negative screen current, and is an inherent quirk of these types of valves. In days gone by this parameter was not well understood, but today we now have several good stabiliser circuits that perform well. Essentially, they all function as a shunt regulator that acts like an adjustable high power Zener diode. Zener diodes, however, tend to generate a lot of wide band noise and this can modulate the screen voltage causing a broad band hash on the transmitted signal.
Note that a series regulated supply is not a good option. In this type of supply when the screen grid tries to push negative current from the screen grid back to the supply it sees this as an over-voltage condition and turns off the series regulator pass transistor. This now allows the screen voltage to climb even higher: it is trying to attain the same potential as the anode voltage, and ultimately the screen voltage exceeds the airflow base decoupling capacitor rating and it flashes over, destroying the base. Voltage dependant resistors (VDRs and MOVs) can prevent the voltage climbing too high by ‘Zener-ing’ but they should not have to perform this function. VDRs and MOVs aren’t designed for a sustained high voltage conditions, they have limited power dissipation and will fail under a prolonged high voltage condition. They are purely intended to chop the short duration peaks off the high voltage transient spikes that may occur.
The screen grid stabiliser circuit also allows switching the screen voltage between two different output voltages when SSB and FM operation is required. As well as being able to be commanded remotely between the two different voltages it also eliminated some of the switching relays previously required when switching between transmit and receive.
Screen supply Tx / Rx switching
It is important to power down the valves during receive, as they can generate a lot of broad-band noise in the receiver if left biased up. They also draw a lot of quiescent current, which is wasteful of power. The most important thing is that the screen grid should never be allowed to float, it must always be either solidly connected to ground or to the output of the screen stabiliser.
If the screen grid floats at an indeterminate potential, it will quickly rise in voltage to that of the anode supply. The airflow base contains a decoupling capacitor to hold the screen grid at RF ground potential, needed for stability reasons. However, the voltage rating of the screen decoupling capacitor is only ~1kV (it is prudent not to exceed half this value), and if this is exceeded they will breakdown and be permanently damaged. The cost of an SK-600 base is more than that of a valve, so anything we can do to protect them is worthwhile. It is also prudent to incorporate VDRs connected between each valve screen grid pin and ground with a break-over voltage a little above the screen voltage, usually 400V VDRs (MOVs) are the best choice. These will turn on and clamp any spikes, so protecting the bases and valves.
4CX250 valves and others in the series can experience a flashover, especially if the valve is old and has been subjected to misuse, often due to excessive anode temperature. A flashover is potentially very destructive as normally it occurs between the anode and the closest electrode in the envelope, which happens to be the screen grid. If a big flashover occurs, and there is no additional protection, normally the airflow base internal decoupling capacitor is over-volted and it breaks down. This can have a knock-on effect and the second valve can experience a similar transient and it can also succumb to the huge spike generated on the common screen grid supply rail. A big flashover such as this has the capability of destroying both bases and valves in a few microseconds. Any sort of fusing is useless, the fuse will never rupture quickly enough.
The problem with previous switching methods is that they used a relay contact that switched between the output of the screen stabiliser and the screen grid pin on transmit. During receive, when the relay coil is de-energised, the other relay contact in the SPCO relay shorted the screen grid pin to ground. In principle it sounds a good method, but relays when switching between the two different states are normally ‘break before make’ and momentarily leave the screen grid pin floating until the relay contacts have fully switched. Other problems with relays are the speed in which they switch over, and the possibility that a contact may become tarnished, or hang up and not make a low resistance path. Because of these problems, a different approach was adopted, as well as fitting VDRs as a belt and braces measure.
Improved screen grid shunt regulator
The shunt stabiliser uses a high voltage MOSFET to draw more or less current from a higher voltage supply through a high wattage dropper resistor. The amount of current the MOSFET draws determines the voltage appearing across the Drain-Source junction. By monitoring this voltage by a potential divider network the reduced voltage drives the MOSFET gate and holds the drain-source voltage constant. (The MOSFET is being used as a variable resistor and not in its usual format as a hard switch, so it is dissipating a fair amount of power.) Part of the potential divider is a variable resistor, which allows setting the exact voltage across the drain-source junction. During receive, when we want to remove the screen grid voltage and ground the screen grid, the supply is switched off by a relay contact. A transistor connected to the relay switched supply turns on a 12V signal, fed via a blocking diode, that turns the MOSFET fully on. This shorts the screen grid to ground with no break caused by moving relay contacts. The instant the switched high voltage is disconnected, the MOSFET is driven hard on.
An alternative to a MOSFET is an IGBT (Insulated Gate Bipolar Transistor) device, as these have higher break-down voltages. The current MOSFET technology is limited to about 800V, although some 1kV devices are now available. The IGBT is a cross between a MOSFET and a conventional transistor with the gate structure of a MOSFET and a bipolar collect-emitter junction. They can handle up to 1.5kV, but all the IGBT devices are high current types and as we only need about 100mA maximum they are not as good a choice, as they are larger and more expensive.
To obtain the two different screen voltages a second variable resistor is switched in or out of the potential divider network and its value determines the other screen grid voltage required.
The MOSFET needs to withstand a maximum of about 400V DC across the drain-source junction and several parts available at low cost satisfy this requirement. The circuit in Fig 16.9 shows a IRF-840 n-channel MOSFET, but many other devices will work satisfactorily. The IRF-840 is rated at 500V, an average current of 8A with a saturated drain-source resistance of 0.85Ω. As with most switching MOSFETs, the gate threshold voltage has rather a wide tolerance, the data sheet gives this as +2V to +4V for a drain current of 250µA at a junction temperature of +25ºC. In practice this isn’t a great concern, although different devices will show a large spread in values, the one we will be using will fall within this range and whatever it happens to be will be constant over a fair range of temperature.
The absolute maximum screen grid dissipation rating of the 4CX250 is 12W, but it is prudent to reduce this value in the interest of enhancing the life of the valve. With a screen grid voltage of 300V applied this equates to 40mA of current per valve. Reducing the screen grid dissipation to a maximum of 9W gives a current of 30mA per valve. The stabiliser hence needs to supply a maximum of ~60mA.
During zero drive condition with the valves biased on this total current flows to ground (plus any negative screen current) via the MOSFET to hold the voltage constant. In this state the MOSFET exhibits a drain-source resistance of
(350 / 0.06) = 5833Ω. When the valves are driven the demand from the valves rises from zero to some maximum peak current. Assume that each valve draws 20mA at the output power set. This means that the MOSFET turns off a little and the 40mA which was flowing to ground is now going to the valves and only 20mA flows to ground in the MOSFET. For a screen grid current of 40mA the MOSFET drain-source resistance is now (350 / 0.02) = 17,500Ω, which is three times higher than the 60mA state. The maximum dissipation in the MOSFET is then one third of that when the amplifier is not being driven.
Under no drive conditions the total 60mA is flowing to ground through the MOSFET at a voltage of, say 350V. This is a power dissipation of 21W. The IRF-840 has a maximum power dissipation of 125W when bolted to a suitable heatsink, the case temperature being held at +25ºC. In a practical design the case temperature will be higher and a good estimate is that the maximum safe dissipation will be about 50W at a case temperature of +40ºC. The estimated dissipation of 21W is nowhere near its full rating and it will run quite cool with an adequate heatsink. MOSFETs can be safely paralleled to increase the power rating, so two devices connected in parallel will double the total power rating if we need more. (If adding a second MOSFET connect both drain terminals together but repeat R9 for the new device so each MOSFET has a 100Ω series gate resistor.)
If the valves demand more than the total shunt current of 60mA the MOSFET is fully turned off and the output voltage begins to drop. This reduces the current available to the valves and they are protected from excess screen grid dissipation. However, this state should never occur in normal operation.
The schematic of the improved screen grid stabiliser is shown in Fig 16.9. It is simple and uses very few components, but some parts require care in selecting the correct types for the job. When subjected to high voltage high value resistors can track and arc so a limit of about 250V is a prudent maximum to use. This also assists with increasing their ability to dissipate the heat generated within them. (If special high voltage resistors of 1W rating are available the value required is twice the individual resistors, a 270kΩ or 330kΩ would be appropriate.) In the diagram the 1/2W resistors on the high voltage side are split into two smaller values and connected in series to cater for these parameters.
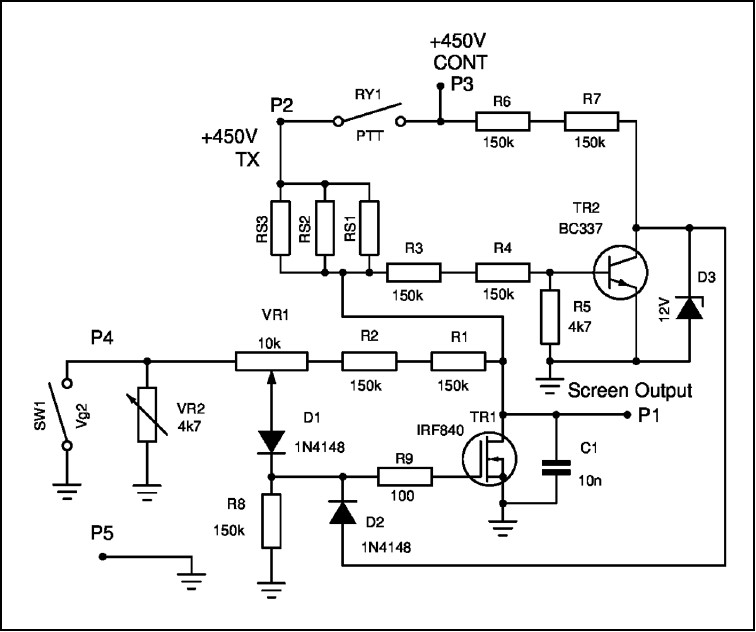
Fig 16.9: Screen grid stabiliser circuit.
Resistor Rs is the main dropper resistor and will dissipate a fair amount of power as heat. This can be made up from standard wire wound resistors of an adequate rating. The resistance required is determined by the current flowing in them and the unregulated high voltage supply. Choosing the supply to be +450V means that when the voltage is set to +350V there is 100V being dropped across the resistor. At a current of 60mA this equates to 6W dissipation and a 10W or higher wattage resistor is prudent. The value required is 1.66kΩ, so a value of 1.5kΩ or 1.8kΩ would normally suffice, or two 3.3 kΩ / 5W in parallel. In the schematic this is resistor RS1 to RS3. This can be made up from series or parallel resistors of a suitable value and wattage, but see the comments later about the switched voltage option. If the screen stabiliser components were placed in the grid compartment and the blower is used to pressurise the grid box they could dissipate about twice their normal rating. If the MOSFET is heatsinked to the metalwork with an insulating washer it will be close to an infinite heatsink.
The unregulated screen supply is switched by a relay (RY1) by the main PTT line so that in transmit it switches the supply to the dropper resistors. A potential divider from the drain of the MOSFET (R1 / R2 in series) feeds a pot (VR1) that supplies a low voltage sample to the gate of the MOSFET. If the drain voltage tries to rise the gate voltage also rises and turns on the MOSFET harder. This draws more current through the dropper resistor, causing an increased voltage drop, and brings the drain voltage back to the set point. The response time is very fast, but it is slowed down a little by a capacitor across the drain to ground to preserve stability in the feedback network. In addition, the inherent gate-source capacity of the IRF-840 is ~1,300pF, which adds some extra smoothing to the feedback network.
When the screen relay is energised by the PTT line a high value resistor (R3 / R4) supplies another potential divider that turns on a small NPN transistor TR2. The collector of TR2 has another high value resistor (R6 / R7) that is fed from the unswitched +450V supply and a 12V Zener which supplies a constant 12V to TR2. However, because TR2 is turned fully on during transmit the Zener is shorted to ground and the collector voltage of TR2 is close to zero. During receive, TR2 is turned off and the 12V is fed via a diode to the gate of the MOSFET to turn it fully on. As the high voltage unregulated supply has been switched off by RY1 it brings the screen grid output terminal to zero volts by a short to ground. The on-resistance of TR1 is 0.85Ω maximum, which is close to zero.
The voltage adjusting pot VR1 has another pot (VR2) in its ground lead and this is used to set the other screen grid voltage of +250V instead of the +350V. This second pot has a relay contact or a single pole toggle switch connected across it to short it out. When SW1 is open the screen grid voltage is +250V and when closed it is +350V. These two pots allow a wide range of setting the operating parameters for different modes. To set up the stabiliser, apply +400V to +450V to the input and short out VR2. Adjust VR1 to obtain +350V. Remove the short across VR2 and set this pot to obtain +250V. If you switch between the two states it will give either +250V or +350V.
Note that the dropper resistor power dissipation when using the +250V setting is about twice the dissipation of the +350V setting, so a suitable wattage resistor needs to be selected. If the +450V supply can also be reduced the original wattage will not greatly increase. If it is not convenient to lower the input voltage the safest choice would be to fit 3 x 10W resistors and this should cater for all needs.
All the other resistors can be 0.5W carbon-film or metal-film. The 12V Zener can also be a 0.5W rating. TR2 can be almost any small signal NPN transistor such as a BC107, 2N2222 etc, as the maximum collector voltage is only 12V. The 10nF capacitor across the output should be 400V DC working or higher. Do not fit any larger value capacitors across the output, apart from VHF decoupling capacitors and VDRs, as these slow down the transient response to rapid changes in the current demand. VR1 and VR2 can be pre-set PCB mount pots of 0.5W rating, preferably multi-turn types for finer adjustment.
REFERENCE
[1] ‘New Ideas for the 2-metre Kilowatt’, by Thomas F McMullen Jr, W1QVF, and Edward P Tilton, W1HDQ, ARRL QST February 1971 (W1QVF later became W1SL).



")


