Книга: Homo Roboticus? Люди и машины в поисках взаимопонимания
Назад: Глава 6 Сотрудничество
Дальше: Глава 8 …и последнее
Глава 7
На помощь
Осенью 2013 г. в выходные дни в лаборатории робототехники стояла мертвая тишина. Саму лабораторию можно было принять за обычную механическую мастерскую в Новой Англии, забитую железками и станками. Марк Райберт, бородатый робототехник и один из ведущих разработчиков шагающих роботов в мире, стоял перед небольшой внутренней выгородкой, нежно именуемой «мясохранилищем», и наслаждался картиной. Помещение было завалено оборудованием, но в дальнем конце к потолку словно туши были подвешены семь внушающих впечатление гуманоидных роботов. Безголовые и неподвижные роботы выглядели, конечно, жутковато. Без декоративной оболочки они были кибернетическими скелетами из стали, титана и алюминия. Каждый из них мерцал призрачными синими светодиодами, подсвечивавшими помещенный в груди компьютер для управления двигателями. В каждой из снятых «голов» находился другой компьютер, отвечавший за контроль датчиков в теле и сбор данных. В собранном виде роботы имели рост 180 см и весили 150 кг. В реальности их движение было не таким грациозным, как на видео, но в них несомненно чувствовалось достоинство.
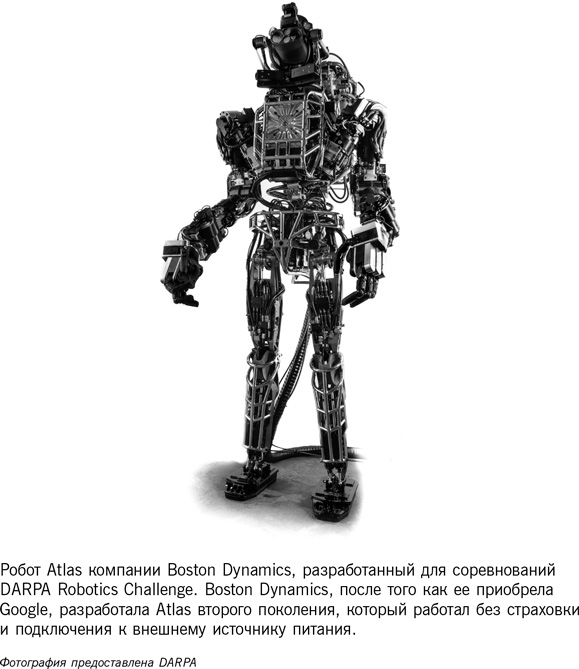
Все это происходило за неделю до того, как DARPA объявило о заключении контракта с Boston Dynamics, компанией Райберта, на разработку роботов Atlas как общей платформы для нового вида соревнований Grand Challenge. Эти соревнования ставили целью создать поколение мобильных роботов, способных действовать в среде, слишком опасной для людей. Boston Dynamics, которую в том же году купила Google, уже имела глобальную репутацию создателя шагающих и бегающих роботов, построенных главным образом для Пентагона.
Несмотря на финансирование со стороны военных, Райберт не считал, что его фирма занимается созданием оружия. Почти всю свою карьеру он посвятил одной из самых сложных проблем в мире искусственного интеллекта и робототехники: строительству машин, движущихся по пересеченной местности с легкостью животных. Если исследователи искусственного интеллекта на протяжении десятилетий пытались моделировать человеческий интеллект, то Райберт пытался воспроизвести ловкость и изящество движений человека. Он давно считал, что создание подвижных машин – более трудная задача, чем многие другие аспекты искусственного интеллекта. «Воспроизвести ловкость прыгающей с ветки на ветку белки или взлетающей и садящейся птицы, – говорил Райберт, – так же сложно, как и создать интеллектуальную программу».
Роботы Boston Dynamics, получившие имена LittleDog, BigDog и Cheetah, вызвали оживленную и временами истеричную интернет-дискуссию о сходстве современных роботов с Терминатором. В 2003 г. компания заключила первый контракт с DARPA на создание четвероногого робота. Пять лет спустя на YouTube можно было увидеть BigDog, идущего по пересеченной местности, несущегося по льду и не падающего от сильного пинка. Под завывания двигателя нетрудно было представить, как такая штуковина гонится за вами по лесу. Это видео посмотрели более 16 млн человек, и их реакция была инстинктивной. Для многих BigDog олицетворял зловещих роботов из научной фантастики и Голливуда.
Райберта, который обычно ходил в джинсах и гавайской рубашке, забавляло, когда его представляли в образе «Доктора Зло». Прямые контакты со СМИ были не для него – он предпочитал «убойные» видеоклипы. При этом он не оставлял без внимания комментарии, а они говорили о том, что многие не видят общей картины: мобильные роботы вот-вот станут неотъемлемой частью нашего мира. В одном из интервью Райберт заметил, что его критики упускают главное. «Похоже, люди действительно боятся, – сказал он британскому техническому журналу. – На YouTube из десятка тысяч откликов на видеоклипы с BigDog примерно треть приходится на испуганных, которым кажется, что роботы охотятся на них. Однако надо не бояться, а гордиться тем, что мы сумели приблизиться к подвижности людей и животных и сделать нечто так похожее на живое». По его словам, еще одна категория зрителей демонстрирует притворный шок, а на деле восхищается зрелищем в стиле научной фантастики.
Соревнования DARPA Robotics Challenge (DRC) определили спектр возможных отношений между людьми и роботами еще более отчетливо, чем Grand Challenge для беспилотных автомобилей. Они предвещали мир, в котором роботы станут партнерами людей, будут танцевать с ними, обслуживать их или же полностью заменять. На первых соревнованиях DRC в 2013 г. роботы практически полностью управлялись людьми на основе данных, поступавших от датчиков по проводам. Роботы Atlas компании Boston Dynamics с ограниченным набором таких способностей, как умение ходить и двигать руками, предоставлялись в распоряжение 16 соревнующихся команд, а те должны были самостоятельно запрограммировать их для выполнения конкретных задач. Осенью, когда Boston Dynamics выполнила заказ DRC, и во время предварительных соревнований во Флориде в конце года роботы выглядели сравнительно медленными и неуклюжими.
Однако в «мясохранилище» казалось: только подай команду, и они будут действовать с ловкостью человека. Это напоминало сцену из фильма 2004 г. «Я, робот» (I, Robot), где полицейский в исполнении актера Уилла Смита с оружием в руках идет через огромный склад с бесконечными колоннами замороженных антропоморфных роботов, ожидающих активации. На экране крупным планом показано, как глаза одного из жутких автоматов следят за движущимся полицейским.
За несколько десятилетий до этого Райберт, только начинавший учиться в магистратуре Массачусетского технологического института, намеревался специализироваться в нейрофизиологии. Однажды он с преподавателем зашел в Лабораторию искусственного интеллекта и увидел у одного из исследователей на столе разобранный на части манипулятор. Райберт был зачарован и с того момента мечтал стать только робототехником. Несколько лет спустя новоиспеченный инженер Райберт получил работу в Лаборатории реактивного движения NASA в Пасадене. Однако там он чувствовал себя чужестранцем на чужой земле. Роботы и занимавшиеся ими сотрудники были определенно гражданами второго сорта по сравнению со звездами агентства, астронавтами. Выпускнику Массачусетского технологического института досталась должность младшего инженера в скучнейшем проекте.
Чтобы не растерять знания, Райберт начал изучать работы Айвена Сазерленда, который к 1977 г. уже был легендой среди компьютерщиков. Проект Sketchpad из диссертации Сазерленда в Массачусетском технологическом институте в 1962 г. стал крупным шагом вперед в сфере компьютерной графики и интерактивных вычислений. В 1968 г. он с Бобом Спроулом разработал первый шлем виртуальной реальности. В 1974 г. Сазерленд основал в Калифорнийском технологическом институте кафедру информатики и оказал поддержку физику Карверу Миду и инженеру-электрику Линн Конвей в разработке новой модели проектирования и производства интегральных схем с сотнями тысяч логических элементов и элементов памяти. В 1980-х гг. их работа открыла путь к созданию современной полупроводниковой промышленности.
Сазерленд фактически пришел в робототехнику еще в 1950-е гг. в средней школе вместе со своим старшим братом Бертом. Этим двум парням повезло, их учил статистик и пионер компьютерной сферы Эдмунд Беркли, написавший в 1949 г. книгу «Гигантские мозги, или Думающие машины» (Giant Brains, or Machines That Think). В 1950 г. Беркли сконструировал Simon, который, хотя и состоял из множества реле и имел память на четыре двухбитовых числа, мог считаться первым персональным компьютером. Под руководством Беркли братья Сазерленд работали над созданием находящего дорогу в лабиринте похожего на мышь робота, и Айвен в рамках научного проекта средней школы сделал память на магнитном барабане, способную хранить 128 двухбитовых чисел, за что получил стипендию в Технологическом институте Карнеги.
Поступив в колледж, братья продолжили работу над «механическим животным». Они упорно совершенствовали свою «зверушку» на базе транзисторов с сухой батареей по образцу механической белки Беркли по имени Squee. Им очень хотелось запрограммировать зверушку так, чтобы она могла играть в пятнашки.
В 1970-е гг. как заведующий кафедрой информатики Калифорнийского технологического института Сазерленд переключился на компьютерную графику и, казалось, потерял интерес к созданию роботов. Когда Райберт побывал на лекции Сазерленда, его зацепили размышления преподавателя о будущих возможностях в этой области. Райберт вышел из аудитории воодушевленным и попробовал пробиться к Сазерленду через окружавшую заведующего кафедрой бюрократическую стену: он послал ему несколько вежливых электронных писем, а также оставил сообщение у секретаря.
Первые обращения остались без ответа. Это раззадорило Райберта, и он придумал план. В течение следующих двух с половиной недель он каждый день в 14:00 звонил в офис Сазерленда. Каждый день секретарь отвечал и принимал сообщение. Наконец рассерженный Сазерленд перезвонил ему. «Что вам нужно?» – прокричал он. Райберт объяснил, что хочет работать с Сазерлендом, и у него есть предложения. Когда они наконец встретились в 1977 г., Райберт выдвинул три идеи, и Сазерленд, узнав о концепции одноногого шагающего, фактически прыгающего робота, сказал: «Сделайте вот этого!»
Сазерленд стал для Райберта первым человеком со связями. Он отвел Райберта в DARPA (где Сазерленд работал в течение двух лет сразу после Ликлайдера) и в Национальный научный фонд. В результате им выделили четверть миллиона долларов на исследования. Сначала они работали над шагающими роботами в Калифорнийском технологическом институте, но несколько лет спустя Сазерленд убедил Райберта перейти вместе с ним в Университет Карнеги – Меллона.
Там Райберт создал замечательную коллекцию роботов, которые прыгали, ходили, извивались и даже кувыркались. У него с Сазерлендом были смежные офисы, и они вместе написали статью о шагающих машинах для Scientific American в январе 1983 г. В 1981 г. Райберт основал в Университете Карнеги – Меллона Лабораторию шагающих роботов, а затем перевел ее в Массачусетский технологический институт, когда работал там преподавателем с 1986 по 1992 г. После ухода из института он учредил компанию Boston Dynamics. Лабораторию шагающих роботов возглавил другой молодой преподаватель, Гилл Пратт, который продолжил разработку шагающих машин и технологий, позволяющих роботам взаимодействовать с людьми.
Если Райберт положил начало разработке шагающих машин, то его коллега по Университету Карнеги – Меллона Рэд Уиттакер почти единолично создал «полевую робототехнику», машины, способные свободно перемещаться в окружающем мире. Идея соревнований беспилотных автомобилей DARPA берет начало в далеком от реальности плане Рэда Уиттакера построить машину, для которой не существует препятствий. Нынешнее поколение мобильных спасательных роботов уходит корнями в его первые разработки три с половиной десятилетия назад.
Карьера Уиттакера началась с аварии на атомной электростанции Три-Майл-Айленд 28 марта 1979 г. Он только что получил степень доктора философии, когда произошло частичное расплавление активной зоны одного из двух ядерных реакторов. Авария показала, насколько отрасль была неподготовлена к потере контроля над ядерным топливом. Лишь через полдесятилетия построенные Уиттакером и его студентами роботы добрались до наиболее поврежденных областей реактора и помогли с дезактивацией.
Время Уиттакера пришло, когда две гигантские строительные компании, потратив $1 млрд, не смогли проникнуть в цокольное помещение поврежденного реактора, чтобы осмотреть его и начать дезактивацию. Уиттакер отправил на Три-Майл-Айленд первого робота Rover, которого его команда собрала за шесть месяцев в апреле 1984 г. Робот представлял собой шестиколесное устройство, снабженное подключенными к контроллеру прожекторами и камерой. Его опустили в цокольный этаж, где он преодолел препятствия в виде воды, грязи и обломков и передал первые изображения последствий аварии. Робот был позже модифицирован для проведения осмотра и сбора проб.
Успех этого проекта стал определяющим для стиля Уиттакера – «ничего невозможного нет» – при решении серьезных проблем. После бюрократических проволочек, затянувшихся на несколько лет, его первая компания Redzone Robotics поставила робота для проведения дезактивации на Чернобыльской АЭС на Украине после катастрофы в 1986 г. В начале 1990-х гг. Уиттакер разрабатывал робота для марсианского проекта NASA. Робот получился большим и тяжелым, поэтому вряд ли стоило рассчитывать на его участие в первом полете. Уиттакеру нужен был не менее грандиозный проект на Земле. Когда беспилотные транспортные средства стали демонстрировать обещающие результаты, исследователи из Университета Карнеги – Меллона решились выпустить машины на улицы Питтсбурга. Ну а если попробовать проехать через весь штат? На взгляд Уиттакера, такой «гранд-тур» мог бы доказать, что роботы готовы действовать в реальном мире, а не только в лаборатории. «Дайте мне два года и полдесятка аспирантов, и мы сделаем это», – заявил он New York Times в 1991 г. Полтора десятилетия спустя Тони Тетер из DARPA подтвердил эту идею, поддержав первые соревнования Grand Challenge для беспилотных автомобилей.
Хотя в начале 1990-х гг. робототехники стали делать значительные успехи в создании полезных роботов, этому предшествовали десятилетия разочарований. Техническая неготовность к решению проблемы АЭС «Три-Майл-Айленд» сначала бросила тень на робототехническую индустрию. В 1980 г. в июньском номере журнала Omni Марвин Мински опубликовал пространный манифест с призывом к развитию технологий телеприсутствия – роботов, снабженных видеокамерами, дисплеями, микрофонами и громкоговорителями, которые позволяют оператору дистанционно «присутствовать» где угодно. Мински указывал на недостатки мира робототехники:
На Три-Майл-Айленд реально необходимо телеприсутствие. Я потрясен неспособностью атомной промышленности справляться с неожиданным. Мы воочию наблюдаем несообразную негибкость современной технологии при действиях в аварийной ситуации и проведении ремонтных работ на этом реакторе. Технический персонал по-прежнему не может провести тщательный осмотр поврежденного реактора из-за угрозы получить годовую допустимую дозу облучения всего за несколько минут. Стоимость ремонта и энергетические потери оцениваются в $1 млрд; телеприсутствие могло бы сократить эти затраты до нескольких миллионов долларов.Серьезная проблема сегодня заключается в том, что АЭС не приспособлены для телеприсутствия. Почему? Технология все еще слишком примитивна. Кроме того, при проектировании АЭС не предусматривается даже возможность установки средств телеприсутствия, когда они появятся. Замкнутый круг!
Отсутствие беспроводной связи было главным препятствием для создания роботов с дистанционным управлением в то время. Но Мински также обращал внимание на то, что сообщество робототехников мало интересует воспроизведение умения человека брать предметы, манипулировать ими и маневрировать. Он низко оценивал состояние имевшихся в распоряжении операторов атомной станции автоматизированных манипуляторов, говоря, что они «немногим лучше, чем плоскогубцы» и им далеко до рук человека. «Если бы люди имели чуть больше технической смелости и попытались приблизить эти руки к человеческим, взяв за образец строение ладони и пальцев, мы могли бы сделать АЭС, заводы и другие опасные предприятия намного более безопасными».
Конечно, критиковать легко, но, когда статью перепечатали в 2010 г. (три десятилетия спустя) в IEEE Spectrum, оказалось, что отрасль добилась на удивление малых успехов. Таких манипуляторов, к созданию которых призывал Мински, по-прежнему не существовало. В 2013 г. Мински сетовал, что даже в 2011 г., когда расплавился реактор АЭС «Фукусима», не было робота, который помог бы в чрезвычайной ситуации. Ясно просматривалось также его негативное отношение к тому, что научное сообщество по большей части придерживается подхода Рода Брукса, который предполагает получение сложных форм поведения путем соединения простых компонентов.
Одним из тех, кто соглашался с Мински, был Гилл Пратт, сменивший Марка Райберта на месте директора Лаборатории шагающих роботов в Массачусетском технологическом институте. Пратт, позднее работавший преподавателем и деканом в Колледже Олина в Нидеме, штат Массачусетс, пришел в DARPA в начале 2010 г. как руководитель двух масштабных программ. Одна из них, Autonomous Robotic Manipulation (ARM), предусматривала создание рук для роботов, об отсутствии которых сожалел Мински. Она ставила задачу создать руку, подобную человеческой, для выполнения множества функций: захватывание предметов, работа с созданными для людей инструментами, использование фонаря. Другой задачей ARM было соединение человеческого мозга с роботизированными конечностями, которые дадут получившим увечья солдатам и инвалидам новую степень свободы. Параллельный ARM проект, названный Synapse, фокусировался на разработке биотехнологических компьютеров, способных лучше преобразовывать машинное восприятие в действия.
Пратт был представителем новой волны, захлестнувшей DARPA вскоре после того, как администрация Обамы назначила Регину Дуган директором агентства вместо Тони Тетера. Тетер разорвал исторически тесные связи DARPA с академическим сообществом и стал работать с закрытыми военными подрядчиками. Дуган и Пратт стремились устранить нанесенный ущерб и быстро восстанавливали отношения с университетскими городками. Исследование Пратта до прихода в DARPA было направлено на создание роботов, способных двигаться за пределами лаборатории. Проблема заключалась в том, как сделать, чтобы роботы могли управлять теми относительно небольшими усилиями, с которыми приходится сталкиваться в реальном мире. Он пришел к выводу, что эту задачу лучше всего решает прокладка из упругого материала между частями робота и зубчатой передачей, приводящей их в движение. Фактически это было копирование биологических сухожилий, расположенных между мышцей и суставом. Упругий материал растягивается, и по степени его растяжения можно определить, какая сила приложена. До этого непосредственная механическая связь между частями рук и ног роботов, обеспечивавшая силу и точность, была слишком негибкой и потенциально опасной для передвижения в непредсказуемом реальном мире, населенном уязвимыми и склонными к агрессивным действиям людьми.
Пратт поначалу не задумывался о сотрудничестве человека и робота. Его интересовало, как пожилые люди обеспечивают свою безопасность при перемещении в мире. Как правило, они пользуются ходунками и инвалидными креслами. При исследовании взаимодействия людей с используемыми ими приспособлениями стало ясно, что защиту при контакте с жесткими препятствиями людям обеспечивает податливость. Будь роботы более податливыми, заключил Пратт, люди могли бы работать рядом с ними, не боясь получить травму.
В лаборатории робототехники Родни Брукса проводилось тестирование одного из первых антропоморфных роботов Cog, созданных в 1990-е гг. Аспирант Мэтт Уильямсон проверял руку робота. В результате ошибки в коде рука периодически шлепала по испытательному стенду. Брукс, оказавшийся в какой-то момент между роботом и стендом, принял шлепок на себя и стал первым человеком, которого ударил робот. К счастью, шлепок был легким, и Брукс остался цел. Исследования Пратта позволили сделать шаг вперед и в сфере биомимикрии, и в сфере сотрудничества робота и человека. Брукс сделал «эластичные приводы» главным средством обеспечения безопасности людей, работающих рядом с роботами.
Когда Пратт пришел в DARPA, он ясно понимал, что, несмотря на десятилетия исследований, большинство роботов все еще остаются в лабораториях не только из соображений безопасности людей, но и из-за неготовности программного обеспечения роботов к функционированию в непредсказуемой окружающей среде. Он работал в DARPA немногим больше года, когда 12 марта 2011 г. на АЭС «Фукусима» обрушилось цунами. Работникам станции какое-то время удавалось держать ситуацию под контролем, но из-за сильной утечки радиации им пришлось покинуть станцию прежде, чем они смогли безопасно остановить реакторы. DARPA в определенной мере участвовало в ликвидации кризиса, поскольку гуманитарная поддержка и помощь при бедствиях входят в компетенцию Пентагона. (После терактов 9/11 агентство предоставляло роботов для поиска выживших во Всемирном торговом центре.) Чиновники DARPA взяли на себя координацию действий и привлекли американские компании, которые помогали устранить последствия аварий на Три-Майл-Айленд и в Чернобыле. Японии предоставили американских роботов – им предстояло проникнуть в помещение и провести ремонт, но к тому времени, когда персонал электростанции освоил управление ими, было слишком поздно, чтобы избежать худшего. Это обескураживало больше всего – Пратт был уверен в том, что быстрое применение роботов наверняка помогло бы и ограничило урон. «Самое большее, что смогли сделать роботы, – это помочь оценить масштабы потерь и измерить уровни радиации. Момент, когда существовала возможность уменьшить масштаб бедствия, был упущен», – писал он.
Эта неудача привела DARPA к идее организовать соревнования Robotics Challenge, о которых объявили в апреле 2012 г. Спонсируя грандиозные соревнования масштаба проводившихся Тетером состязаний беспилотных автомобилей, Пратт рассчитывал подстегнуть появление инноваций, которые способствуют развитию автономных машин для работы в опасных для людей условиях. Командам предлагалось построить и запрограммировать роботов для выполнения восьми задач, которые возникают при авариях на АЭС. Впрочем, большинству не нужно было создавать роботов с нуля: Пратт заключил контракт с Boston Dynamics на поставку антропоморфных роботов Atlas, ставших общей платформой для быстрой реализации идеи.
В темноте можно различить синеватое свечение немигающего глаза, всматривающегося в вечерний мрак. Этот свет излучает сканер сетчатки, который использует глаз для идентификации, как своего рода цифровой отпечаток пальца. Такие дорогостоящие электронные стражи еще не стали привычным явлением, но они уже появились на сверхсекретных объектах. В их присутствии кажется, будто находишься под пристальным взглядом эдакого кибернетического Цербера. Сканер не единственная часть системы информирования и безопасности. Сам дом – парк робототехнических чудес. В холле автоматическая рука бьет молотком в большой гонг, сообщая о новом посетителе. Там повсюду ездящие, летающие, ползающие и шагающие машины. Посетителю все это напоминает сцену из фильма «Бегущий по лезвию», где детектив Рик Декард приезжает в дом генного инженера Джея Себастьяна и оказывается в окружении странных синтетических существ.
В реальной жизни это логово принадлежало Энди Рубину, бывшему инженеру Apple, который перешел в 2005 г. в Google, чтобы возглавить новое направление бизнеса – производство смартфонов. В то время мир считал Google неудержимой компанией, глядя на то, с какой скоростью она превратилась в одного из лидеров компьютерных технологий. Однако основателей Google очень беспокоило то, что их преимущество в области поисковых систем и только что полученное монопольное положение могут оказаться под угрозой в результате быстрого перехода от настольных компьютеров к мобильным. На смену настольным компьютерам шло поколение более миниатюрных машин, приближалось то, что станут называть эпохой пост-PC. В Google опасались, что, если Microsoft сможет распространить свое доминирование в сфере настольных компьютеров на развивающийся мир телефонов, они окажутся за бортом и потеряют монополию в поисковых системах. Apple еще не представила iPhone, поэтому никто не знал, что очень скоро господство Microsoft в сфере настольных компьютеров окажется под вопросом.
Пытаясь оторваться от преследователей, Google приобрела небольшой стартап Рубина в расчете создать собственную операционную систему для переносных устройств. Google представила Android в ноябре 2007 г., через 10 месяцев после появления iPhone. На протяжении половины следующего десятилетия Рубин успешно вытеснял не только Microsoft, но и Apple, BlackBerry и Palm Computing. Он создал операционную систему с открытым исходным кодом и бесплатно предлагал ее компаниям, которые прежде выкладывали Microsoft круглые суммы за лицензии на Windows. Microsoft не могла конкурировать с бесплатным программным обеспечением. К 2013 г. программное обеспечение Google доминировало в мире мобильных телефонов с точки зрения рыночной доли.
В начале своей карьеры Рубин работал инженером-технологом в Apple Computer после непродолжительного сотрудничества с Zeiss в Европе, где он программировал роботов. Через несколько лет Рубин покинул Apple вместе с элитной группой инженеров и программистов и занялся созданием одного из первых карманных компьютеров в General Magic. Попытки General Magic объединить персональную информацию, компьютеры и телефонию оказали большое влияние на новый мир мобильных компьютеров, но закончились провалом.
В 1999 г. Рубин с двумя друзьями, которые также работали в Apple, основал в Пало-Альто компанию Danger, Inc., производителя смартфонов. Название компании отражало давнее увлечение Рубина роботами. (В научно-фантастическом телесериале 1960-х гг. «Затерянные в космосе» (Lost in Space) робот – опекун мальчика говорил «Опасно, Уилл Робинсон!» всякий раз, когда возникала проблема.) Danger создала один из первых смартфонов Sidekick, который был выпущен в 2002 г. Он приобрел немало поклонников из-за выдвигающейся наподобие выкидного лезвия ножа клавиатуры, загружаемого программного обеспечения, электронной почты и резервного копирования персональных данных в «облако». Если большинство деловых людей сохранили привязанность к своим BlackBerry, то молодежь и хипстеры перешли с PalmPilot на Sidekick.
Рубин был членом уникальной «группы братьев по оружию», прошедшей в 1980-е гг. через Apple Computer, – поколения молодых инженеров-компьютерщиков, которые выросли в Кремниевой долине как ученики Стива Джобса. Очарованные харизмой Джобса и его преданностью нестандартным решениям как средству «изменения мира», они пустились в собственные технологические поиски. «Братья по оружию» были проявлением того эффекта, который Macintosh Джобса оказал на всю Кремниевую долину, и многие из них остались друзьями. Лучшие и самые яркие представители Кремниевой долины искренне верили, что принесут новый технологический прорыв миллионам людей.
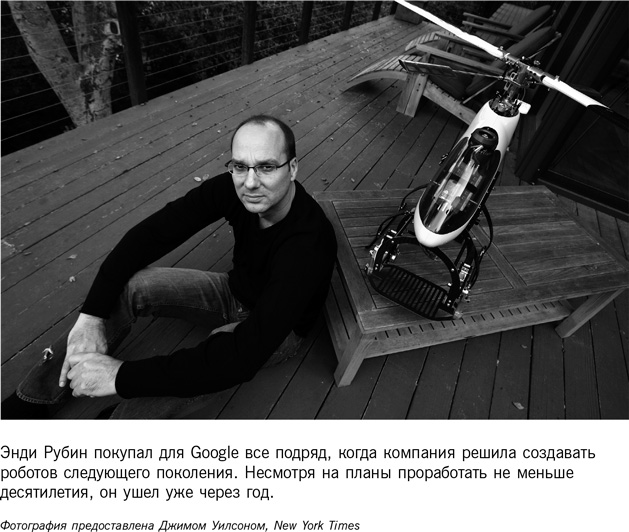
Но страсть Рубина к роботам была необычной даже по меркам его одержимых технологиями друзей. Занимаясь телефонами в Google, он купил манипулятор за $80 000 и стал экспериментировать, полный решимости научить его делать кофе-эспрессо, однако проект застопорился на год из-за того, что один этап процесса требовал большей силы, чем мог обеспечить манипулятор.
Еще в прежние времена Рубин приобрел доменное имя в интернете android.com, и друзья подшучивали над ним, называя «андроидом». В его доме на холмах возле Пало-Альто свидетельства приближающегося мира роботов были всюду, поскольку Энди Рубин и здесь видел что-то, о чем еще не задумывалось большинство других в Долине. Довольно скоро он получил возможность доказать это широкой публике.
Весной 2013 г. в офис генерального директора Google Ларри Пейджа в Маунтин-Вью пришло странное электронное письмо с предупреждением о том, что вторжение инопланетян уже началось. Как только Пейдж прочитал сообщение, к нему ворвались двое крупных мужчин и велели следовать за ними, сказав только, что повезут его в Вудсайд, элитный район, где живут руководители компаний и венчурные капиталисты Кремниевой долины.
Это была вечеринка-сюрприз по случаю сорокалетия Пейджа, организованная его женой Люси Саутуорт, доктором биоинформатики из Стэнфорда. На вечеринке собралось 150 человек в костюмах инопланетян, включая соучредителя Google Сергея Брина в женском платье. В цокольном этаже просторного особняка, где проходила вечеринка, манипулятор захватывал одну за другой небольшие коробки с сувенирами и бросал их в благодарную толпу. Это был стандартный промышленный робот японского производства с пневматическим захватом, приводимым в действие шумным компрессором. Робот мог «видеть» сувениры, которые брал. В качестве глаз, в действительности единственного «глаза», использовался такой же датчик Microsoft, как и в игровой приставке Xbox, позволявший различать жесты игроков.
Бросающий коробки робот был опытным образцом, разработанным Industrial Perception, Inc., небольшой командой из гаража буквально через дорогу от Googleplex в Пало-Альто. Когда робот, ставший интернет-сенсацией после размещения на YouTube видео с вечеринки, не бросал коробки, он служил прототипом нового класса интеллектуальных устройств, которые могли взять на себя столь разнообразные задачи, как погрузка и разгрузка машин, упаковка товаров на складах, работа на сборочных конвейерах и пополнение товарами полок бакалейных магазинов.
Наделение роботов способностью понимать, что они видят, было только частью проблемы. Распознавание шестигранных коробок оказалось не столь непреодолимой проблемой, хотя решить ее удалось лишь недавно. Идентификация предметов на полках бакалейного магазина, например, намного сложнее, и даже сегодня она не по зубам лучшим программистам. На вечеринке в честь Пейджа робот Yaskawa не испытывал трудностей с отысканием коробок с подарками, в каждой из которых лежала юбилейная футболка. Однако упаковывать коробки пришлось людям, поскольку робот пока не в состоянии справиться с неуложенными футболками.
Манипулятор компании Industrial Perception был не единственной интеллектуальной машиной на вечеринке. Робот, обеспечивавший телеприсутствие, находился на танцполе. В Вудсайде наступила полночь, а изобретатель Segway Дин Кеймен управлял роботом из Нью-Гемпшира, где было три утра.
Этого робота, названного Beam, предоставил другой стартап, Suitable Technologies, расположенный всего в нескольких кварталах от Industrial Perception. Обе компании вышли из лаборатории робототехники Willow Garage, финансируемой Скоттом Хассаном, однокашником по Стэнфорду и другом Пейджа. Хассан был первым разработчиком поисковой системы Google еще в рамках исследовательского проекта Стэнфорда. В Willow Garage он собирался построить антропоморфного робота как платформу для исследований. Компания разработала и выпустила в свободный доступ операционную систему для робототехнического оборудования, а также антропоморфного робота телеприсутствия PR2, который использовался рядом университетов.
Таким образом, на вечеринке у Пейджа были представлены технологии и искусственного интеллекта, и усиления интеллекта: один из роботов заменял людей, а другой расширял их возможности. Позже в том году Google приобрела компанию Industrial Perception для новой робототехнической империи Рубина.
Компании, вышедшие из Willow Garage Скотта Хассана, вновь ставят вопрос о «конце работы». Чем занимаются Пейдж и Хассан, не созданием ли поколения технологий, которые разрушат экономику, вытесняя и офисную братию, и производственных рабочих? С точки зрения замены людей укладчик коробок компании Industrial Perception, который сможет загрузить или разгрузить грузовик, является значительным шагом к уничтожению одного из последних бастионов неквалифицированного живого труда. Складские работники, портовые рабочие и грузчики занимаются тяжелой, низкооплачиваемой и неблагодарной работой. Они поднимают упаковки, которые могут весить больше 20 кг, выдыхаются примерно через шесть секунд, часто травмируют спину и заканчивают трудовую деятельность инвалидами.
Инженеры Industrial Perception выяснили, что для получения контрактов со складами и логистическими центрами нужно продемонстрировать способность роботов перемещать коробки с четырехсекундными интервалами. Еще до того, как компанию поглотила Google, они были очень близки к этой цели. Но, с точки зрения американских рабочих, картина выглядит иначе. В FedEx, UPS, Walmart и почтовых отделениях США, где занято большое количество низкоквалифицированных работников, на первом месте стоит не стоимость рабочей силы и не стремление заменить рабочих дешевыми машинами. Они и так сократили немало рабочих мест. Компании волнует другое – старение рабочей силы и дефицит трудовых ресурсов. Возможно, в узком секторе погрузки и разгрузки грузовиков роботы появятся как раз вовремя. Без ответа остается более серьезный вопрос: станет ли наше общество помогать своим работникам после нового разделения труда в результате автоматизации?
В конце 2013 г. на ничем не выделяющемся складе позади мебельного магазина в Норт-Майами группа молодых японских инженеров начала ежедневные тренировки, продолжавшиеся весь месяц до DARPA Robotics Challenge. Они учились под руководством известного робототехника Масаюки Инаба, который сам был лучшим студентом основоположника японской робототехники Хиротика Иноуэ. Иноуэ начал заниматься робототехникой во время учебы в магистратуре в 1965 г., когда его консультант предложил разработать манипулятор, поворачивающий заводную рукоятку.
Из-за специфики культуры роботы в Японии получили более позитивный прием, чем в США. Америка разрывалась между образами робота как героического «железного человека» и Терминатора. (Конечно, было бы разумно задаться вопросом о реальном отношении американцев к Терминатору после того, как жители Калифорнии дважды выбирали губернатором сыгравшего его голливудского актера!) Но в Японии в 1950-х и 1960-х гг. мультперсонаж робот Атом, получивший в других странах имя Астробой, сформировал более положительное представление о робототехнике. В какой-то мере это объяснимо: Япония – стареющее общество, и японцы полагают, что им нужны автономные машины для ухода за престарелыми.
Японская команда, взявшая название Schaft, родилась в лаборатории JSK, которую доктор Иноуэ создал в Токийском университете в начале 2013 г. с целью участия в DARPA Robotics Challenge. Ей пришлось уйти из Токийского университета, который по традиции после окончания Второй мировой войны не допускал участия университетской лаборатории в мероприятиях, финансируемых американскими военными. Команда взяла название выступавшей 1990-х гг. в жанре электро-индастриал-рок японской музыкальной группы. Рубин нашел этих исследователей через Марка Райберта.
Объявление о том, что Google приобрела Schaft, вызвало серьезное негодование в Японии. Робототехника была гордостью страны. Японцы не только добились отличных успехов в создании шагающих машин, но и в течение многих лет успешно продавали самых современных роботов, которые стали чуть ли не потребительскими товарами. Sony в 1999 г. представила собаку-робота Aibo и предлагала все новые ее версии до 2005 г. После Aibo был создан и рекламировался 60-сантиметровый робот Qrio, но в продажу он не поступил. И вот теперь Google снимает сливки с десятилетий японских исследований.
В реальности, несмотря на то что японцы доминировали в создании манипуляторов первого поколения, другие страны быстро догоняют их. Программное обеспечение для роботов следующего поколения и искусственного интеллекта разрабатывается в основном в США. В 2012 и 2013 гг. и Кремниевая долина, и Шоссе 128 вокруг Бостона вновь стали центрами активности в сфере робототехники.
Соглашаясь присоединиться к расширяющей робототехнической империи Рубина, исследователи Schaft испытывали смешанные чувства. Сильны были опасения, что теперь, когда они маршируют под барабаны Google, придется забыть о мечте попробовать силы в соревнованиях Пентагона. «Не берите в голову! – сказал им Рубин. – Вы обязательно будете участвовать в соревнованиях». Не успели высохнуть чернила на контракте с Google, а японские инженеры уже готовились к соревнованиям. Они сразу же начали работать над тремя прототипами машин и подготовили макеты каждой из восьми задач соревнования: пересеченная местность, дверь, трубопроводный вентиль, лестница и т. д., чтобы немедленно приступить к испытанию роботов. В июне, когда чиновники DARPA оценивали прогресс каждой группы, тщательность подготовки команды Shaft поразила Гилла Пратта – на тот момент у остальных команд еще и конь не валялся!
В сентябре два члена команды Schaft поехали на предварительную встречу DARPA, проводившуюся в Атланте параллельно с посвященной антропоморфным роботам конференцией Humanoids 2013. Они привезли видео, чтобы продемонстрировать свои успехи. Хотя японцы почти не говорили по-английски, видео поразило всех как удар молнии. Из него следовало, что они решили все проблемы программирования, в то время как конкуренты все еще осваивали программирование роботов. Два молодых инженера ушли со сцены, оставив других участников в шоке. Пару месяцев спустя на складе в Майами команда воссоздала испытательную трассу из фанеры. Хотя на носу уже был декабрь, душная, ненастная погода Майами и комары изводили исследователей. Приглядывавшего за командой местного охранника искусали так, что он попал в больницу с сильнейшей аллергией.
Ребята из Schaft установили станцию управления на длинном столе во вместительном здании. Работа с роботом была предельно простой, пользователи управляли машиной с помощью пульта от Sony Playstation PS3, прямо как в видеоигре. Оператор робота позаимствовал звуковые сигналы из игр Nintendo и добавил свою специальную звуковую обратную связь. Исследователи повторяли каждое задание много раз, пока робот не проходил маршрут на «отлично».
Гоночную трассу Homestead-Miami Speedway не удивить рычащими машинами. Когда она принимает гонки NASCAR, трибуны заполняют старые добрые парни с Юга. Но в декабре 2013 г. соревнования Robot Challenge окружала совсем другая атмосфера. Райберт назвал это «Вудстоком роботов». Он приехал, чтобы контролировать качество технической поддержки, предоставляемой Boston Dynamics, и устроить шоу с участием нескольких финансируемых Пентагоном четырехногих роботов. Эти машины периодически то проходили, то пробегали вдоль трассы на глазах у нескольких тысяч изумленных зрителей. Во время соревнований DARPA также устроило ярмарку роботов с несколькими десятками участников, которая привлекла заметное число посетителей и массу представителей СМИ.
Публично объявив о создании робототехнического подразделения Рубина за несколько недель до Robotics Challenge, Google лишь подчеркнула рост влияния робототехники на все аспекты жизни общества. В начале месяца в программе «60 минут» прошел телесюжет о Джеффе Безосе и Amazon, в котором Безос приводит Чарли Роуза в лабораторию и показывает дрон-октокоптер, разработанный для беспилотной доставки товаров Amazon «через 30 минут». Репортаж вызвал новую волну дискуссий о растущей роли роботов в обществе. Складирование и дистрибуция коммерческих товаров давно стали масштабным бизнесом в Соединенных Штатах, и Amazon быстро превратилась в доминирующего низкозатратного игрока. Google собиралась соперничать с Amazon в сфере доставки всех видов товаров, и это означало автоматизацию складских процессов и приближение центров дистрибуции к потребителям. Ну а если склад находится недалеко от потребителя, например в нескольких кварталах в большом городе, почему бы не использовать дроны на «последней миле»? Казалось, будто научная фантастика стала реальностью, и ошеломленный Роуз не задавал острых вопросов.
Google, однако, представила собственный проект доставки с помощью дронов. Всего через несколько дней после феерии Amazon в программе «60 минут» New York Times сообщила об амбициях Google в сфере роботов, которые затмили то, что Безос обрисовал в телевизионных новостях. Рубин оставил должность главы подразделения по разработке телефонов на Android весной 2013 г. Хотя поговаривали, что он проиграл в борьбе за власть и вышел из фавора, на деле все было не так. Генеральный директор Google Ларри Пейдж открыл корпоративную чековую книжку и отправил Рубина в поход за покупками. Рубин потратил сотни миллионов долларов на приобретение талантов и лучших достижений в сфере робототехники. Google помимо Schaft получила Industrial Perception, Meka Robotics и Redwood Robotics, группу разработчиков антропоморфных роботов и манипуляторов из Сан-Франциско во главе с одним из лучших студентов Родни Брукса, а также Bot & Dolly, разработчика систем камер, использовавшихся для создания спецэффектов в кинофильме «Гравитация» (Gravity). Boston Dynamics была вершиной покупательского бума.
Приобретение Google тесно связанной с военными компании R & D породило множество домыслов. Многие предполагали, что Google, купив военную робототехническую фирму, может стать производителем оружия. Ничто не могло быть дальше от истины. Во время разговоров с технологами приобретаемых компаний Рубин рассуждал о роботах, которые могут справиться с задачами персонала службы доставки UPS и FedEx. Если Безос мечтал о доставке потребительских товаров по воздуху, то из грузовика службы Google Shopping Express к вашей двери должен был выходить робот. Рубин давно поддерживал тесную связь с Терри Гоу, генеральным директором гигантской китайской производственной компании Foxconn. Роботы вполне могли заменить какую-то часть миллиона «животных» Гоу.
Google выбрала исключительно удачный момент для обнародования своих планов. Robotics Challenge в декабре 2013 г. были пробой, а заключительный этап ожидался в июне 2015 г. DARPA устроило на первых соревнованиях два «заезда» – один для команд с собственными роботами, а другой для команд с роботами Atlas компании Boston Dynamics. Предварительный этап стал презентацией нового направления деятельности Google. Рубин с небольшой свитой прибыл в аэропорт Майами на корпоративном самолете Google G5, где его ждали два автобуса с кондиционерами, арендованные для мероприятия.
Соревнования включали восемь самостоятельных заданий, которые предстояло выполнить за два дня. У команд с роботами Atlas было не так много времени на программирование и тренировку, и это сказалось на результатах. По сравнению с ловкими четвероногими демонстрационными роботами Boston Dynamics участники соревнований выглядели медлительными. Еще одним свидетельством не слишком высоких достижений было то, что роботов страховали чем-то вроде лонжи во избежание повреждения в результате падения.
DARPA также предоставляло небольшой перерыв при выполнении теста на вождение, чтобы помощники могли усадить робота в автомобиль и соединить его с рулем и тормозами перед поездкой по короткой трассе с препятствиями. Даже лучшие команды, включая Schaft, преодолевали трассу с частыми остановками, чтобы сориентироваться. Такая медлительность поразительно напоминала робота Shakey, созданного десятилетия назад в SRI. Роботы по-прежнему не были автономными. Управлявшие ими люди находились в гаражах, а роботы выполняли свои задачи на поле внутри трассы. Для связи использовалась волоконно-оптическая сеть, по которой видеоинформация и данные с датчиков поступали на рабочие станции операторов. Чтобы усложнить задачу команд и создать ощущение реального кризиса, DARPA через регулярные интервалы нарушало передачу данных. Это привносило заминки в движение даже лучших роботов, и присутствовавшие корреспонденты мучались в поиске менее избитых метафор, чем «ожидание, пока вырастет трава» и «ожидание, пока высохнет краска», при описании действа.
Так или иначе соревнования DARPA Robotics Challenge достигли поставленной цели: выявить ограничения существующих роботизированных систем. По-настоящему автономные роботы еще не стали реальностью. Даже прыгающие и бегающие машины Boston Dynamics, выступавшие на асфальтированной трассе, контролировались операторами через беспроводную связь. Вместе с тем было ясно, что настоящие автономные роботы появятся очень скоро. Если соревнования автономных автомобилей в 2004–2007 гг. значительно ускорили развитие беспилотников, то Robotics Challenge приблизили реализацию мечты Гилла Пратта о роботе, который может работать в опасной среде, и созданного Энди Рубином образа робота Google для автоматизированной доставки. Трасса Homestead-Miami также показала, что есть два подхода к определению облика приближающегося мира людей и роботов. Один – симбиоз человека и машины, проповедуемый Джозефом Ликлайдером, другой – все более широкое вытеснение людей машинами. Как говорил Норберт Винер еще на заре эры компьютеров и роботов, одна из будущих возможностей безрадостна для людей. Выход из этого тупика показал Терри Виноград, ставивший человека в центр проекта.
На трассе Homestead-Miami начало темнеть, и бегавший туда-сюда робот-бык стал походить на призрак. Механизм быка мягко рычал, двигая его механические ноги взад и вперед, а ящик на боку отбивал стаккато. Оператор вел робота с комфортной скоростью. С наушниками и полным коммуникационного оборудования ранцем, он держал пульт, как для видеоигр, но значительно большего размера. Хитроумное устройство пробежало мимо гаражей, где группы инженеров и программистов сосредоточенно работали с роботами после дневных соревнований.
Соревнования DRC напоминали сцену в баре из фильма «Звездные войны. Эпизод IV: Новая надежда». Большинство роботов Boston Dynamics были гуманоидами, что объяснялось просто: двуногие лучше взаимодействуют с созданной человеком средой, чем другие формы. На соревнованиях присутствовали и более странные создания, например «трансформер» из Университета Карнеги – Меллона, похожий на роботов из японских научно-фантастических фильмов, и пара паукообразных шагающих машин. Самым привлекательным был робот Valkyrie из NASA, который напоминал женщину-штурмовика Империи из «Звездных войн». К сожалению, Valkyrie оказался одним из трех неудачно выступивших роботов – он не выполнил ни одного задания. У инженеров NASA было мало времени для доработки своей машины из-за отсутствия финансирования в связи с приостановкой деятельности федерального правительства.
На двухдневном мероприятии явно блистал робот команды Schaft. Его разработчики, примерно десяток японских инженеров, были единственной командой, которая почти идеально выполнила все задания и победила на первых соревнованиях Robotics Challenge. Робот Schaft допустил единственную ошибку: он попытался пройти через захлопнувшуюся от порыва ветра дверь. Порывы ветра несколько раз вырывали дверную ручку из захвата японского робота, прежде чем он протянул вторую руку, чтобы зафиксировать пружинный доводчик.
Пока шли соревнования, Рубин занимался переселением своих японских робототехников в просторный, площадью 2800 м² офис на самом верху небоскреба в Токио. Чтобы разработчики не мешали другим арендаторам, в данном случае адвокатам, Google купила два этажа в здании и превратила один из них в буфер для звукоизоляции.
В преддверии Robotics Challenge несколько конкурирующих команд и Boston Dynamics выпустили видео с демонстрацией способностей Atlas. В большинстве роликов роботы ходили по ровной поверхности, показывали умение держать равновесие и поворачиваться. Но в одном из них с участием прототипа Atlas робот поднимался по лестнице и пересекал участок с ямой, делая большой шаг и опираясь руками о стены. Он двигался со скоростью и ловкостью человека. Сцену тщательно срежиссировали, а роботом (он не был автономным) дистанционно управлял оператор. Выводы, однако, были очевидны – «механическая часть» уже позволяет роботам перемещаться в реальном мире при наличии соответствующих программ и датчиков.
Несмотря на неоднозначную реакцию публики на ролик, команде Schaft он понравился. После победы, к удивлению членов команды, робот-бык Boston Dynamics подбежал к их гаражу, плюхнулся на землю и отключился. Все столпились вокруг него и открыли ящик на боку. В нем была дюжина шампанского и поздравление от инженеров Boston Dynamics. Они стремились побыстрее установить контакт с новичками, с которыми им предстояло работать над будущим мобильным роботом Google.
Инженерам Google хотелось произвести эффект. В ходе планирования демонстрации достижений Boston Dynamics на гоночной трассе руководители одной из компаний Рубина придумали, как лучше представлять их в течение двухдневных соревнований. Самым интересным на них оказалось не наблюдение за роботами, выполняющими задания. Настоящими хитами стали четвероногие роботы LS3 и Wildcat, которые сновали туда-сюда по трассе. Робот LS3, похожий на быка без головы, рычал, двигаясь решительным шагом. Время от времени сотрудник Boston Dynamics толкал машину, но робот ловко отклонялся и быстро восстанавливал равновесие, будто ничего и не было. Google первоначально хотела организовать что-то более внушительное. Что, если показать робота-собаку, преследующую робот-автомобиль? Это было бы зрелищно. Но в DARPA зарубили идею. Такое действо смахивало на рекламу Google, да и реакция на нее могла быть не самой лучшей. В конце концов, если роботы могут гоняться друг за другом, что им стоит погнаться еще за кем-то?
Команда Schaft быстро расправилась с шампанским. Эта ночь была бурной для молодых японских инженеров. Один из исследователей, бродивший, пошатываясь, с бутылкой шампанского в руке, на следующий день оказался в больнице с жестокой головной болью. Значение победы Shaft было предельно ясно группе из трех десятков робототехников, собравшихся перед гаражом Schaft. Новая команда Рубина имела общую цель. Скоро машины будут постоянно находиться среди людей и неизбежно возьмут на себя значительную часть тяжелой работы. Создание роботов, способных делать все от приготовления кофе до загрузки грузовиков, было вполне под силу инженерам.
Робототехники Google не сомневались, что в конечном счете машины заменят людей. При достаточной вычислительной мощности и хороших программах инженеры, казалось, могут смоделировать любые качества и способности человека, включая зрение, речь, чувственное восприятие, подвижность, а может быть, и самосознание. Разумеется, для них было немаловажно сознавать, что их работа несет благо обществу. Хотя в краткосрочной перспективе вытеснение людей вело к конфликтам, они считали, что в конечном итоге автоматизация повысит общее благосостояние человечества. Именно этого хотел добиться Рубин. Тем вечером он в стороне от толпы тихо разговаривал с несколькими инженерами, собиравшимися отправиться в новое путешествие, чтобы ввести роботов в мир. Рубин крупно выиграл уже на старте, и это говорило о надежности его команды. Он поспорил с Ларри Пейджем на свою годовую зарплату, что команда Schaft выиграет соревнования DARPA. К счастью для Пейджа, годовой оклад Рубина составлял всего один доллар. Впрочем, как и у многих руководителей Google, его реальное вознаграждение было намного, намного выше. Однако спустя год после основания робототехнического подразделения компании Рубин ушел из компании. Он приобрел репутацию одного из самых элитных технологов Долины, но, по его собственному утверждению, ему было интереснее создавать новые проекты, а не управлять ими. После его внезапного ухода в конце 2014 г. до создания царства роботов, которое он намеревался построить, было еще очень далеко.
После соревнований в Хомстеде Энди Рубин пояснил, что его конечная цель – создание робота, способного выполнить любое из конкурсных заданий после простого нажатия на кнопку. В конечном счете этому не суждено было осуществиться. Несколько месяцев спустя Google отозвала Schaft с финала, чтобы сосредоточиться на поставке роботов Atlas второго поколения для других команд.
Сегодня лабораторию робототехники Google можно найти в самом сердце Кремниевой долины на Саут-Калифорния-авеню, отделяющей Колледж-Террас, традиционный студенческий район, когда-то наполненный бунгало, а теперь приобретающий все более фешенебельный вид, от Стэнфордского технопарка, который можно с полным основанием назвать местом рождения Долины. Занимающий около 280 га на землях бывшей фермы семьи Леланда Стэнфорда-младшего, технопарк был детищем декана Стэнфордского университета Фредерика Термана, убедившего своих студентов Уильяма Хьюлетта и Дэвида Паккарда остаться на Западном побережье и начать собственное дело там вместо более традиционной карьеры на Востоке в крупных электронных компаниях первой половины прошлого столетия.
Стэнфордский технопарк давно превратился из производственного центра в район корпоративных кампусов. Под сенью Стэнфордского университета приютились штаб-квартиры, исследовательские центры, адвокатские конторы и финансовые компании. На Саут-Калифорния-авеню и Хановер-стрит в 1970 г. находился исследовательский центр Xerox Corp., где небольшая группа исследователей создала компьютер Alto. Smalltalk, программное обеспечение Alto, разработала другая группа PARC во главе с ученым-компьютерщиком Аланом Кеем, студентом Айвена Сазерленда в Университете Юты. В поисках конкурентного преимущества перед IBM на нарождающемся рынке офисных компьютеров Xerox намеревалась построить в технопарке лабораторию мирового класса.
Больше чем на десятилетие опередивший свое время Alto был первым современным персональным компьютером с многооконным дисплеем со шрифтами и графикой, позволявшими воспроизводить точную копию того, что получается на печати (т. е. режим WYSIWYG – «что видишь на экране, то получаешь на печати»). Для управления компьютером к нему с помощью кабеля подключали странное катающееся устройство с тремя кнопками, называемое мышью. Для тех, кто видел Alto еще на стадии секретной разработки, он был воплощением идеи Энгельбарта об усилении интеллекта. И это не удивительно. Одним из исследователей был знаменосец контркультуры Стюарт Бранд, фотограф, автор и редактор, вдохновитель выпуска «Каталога всей Земли». В статье для журнала Rolling Stone Бранд назвал PARC «скромным исследовательским центром», а позже ввел в употребление термин «персональный компьютер». В наше время, более четырех десятилетий спустя, настольные персональные компьютеры PARC стали портативными и доступными значительной части населения мира.
Сейчас лаборатория робототехники Google располагается всего в нескольких сотнях метров от здания, где пионеры из Xerox задумали PC. Такая близость подчеркивает символичность идеи Энди Рубина «дать компьютерам ноги и позволить им двигаться». На фоне движения от давней задумки Уильяма Шокли построить «автоматического обучаемого робота» к Xerox PARC и появлению PC, а потом назад, к стартапам Google с их мобильными роботами, близость двух лабораторий лишний раз показывает, как эта индустрия кидается из одной крайности в другую – то расширяет возможности людей, то заменяет их, то переключается с искусственного интеллекта на усиление интеллекта, то возвращается обратно.
Лаборатория робототехники Google не выделяется снаружи ничем примечательным. Однако на лестничной площадке стоит впечатляющая трехметровая стальная статуя, но вот кого… По виду это не совсем робот. Может быть, она изображает какое-то инопланетное существо? А может быть, репликанта? Проект Рубина имел кодовое название «Репликант» – оно, конечно, было навеяно фильмом «Бегущий по лезвию». Цель Рубина состояла в создании и серийном выпуске антропоморфного робота, который мог действовать в реальном мире – доставлять посылки, работать на фабриках, ухаживать за престарелыми, сотрудничать с людьми и, возможно, заменять их. Он намеревался довести до конца то, что начиналось почти полвека назад в Стэнфордской лаборатории искусственного интеллекта (SAIL).
Исследования, начатые SAIL, породили поколение студентов вроде Кена Солсбери. Молодой инженер Солсбери считал себя не столько «создателем искусственного интеллекта», сколько «оператором». Он обучался в традиции Норберта Винера и не считал, что интеллектуальным машинам нужна автономность. У него был достаточный опыт работы в сфере автоматизации, чтобы видеть изменение баланса между человеком и машиной, и он предпочитал сохранять людей в контуре управления. Солсбери хотел построить робота, который, например, мог пожать вам руку и при этом не сломать ее. К счастью для него, роботы обретали автономность медленно. Проблема приближения к человеку, которому достаточно было сказать «возьми вон ту красную тряпку», решению не поддавалась.
Солсбери напрямую столкнулся с парадоксом, описанным Хансом Моравеком, – самые трудные для людей вещи легче всего даются машинам, и наоборот. Этот парадокс был обнаружен исследователями в 1980-х гг., и Моравек упомянул о нем в своей книге «Дети разума»: «Компьютеры сравнительно легко показывают результаты на уровне взрослого человека при проверке умственных способностей или при игре в шашки, но крайне трудно, а то и невозможно наделить их способностями годовалого малыша, когда дело доходит до восприятия и подвижности». Джон Маккарти, бывало, демонстрировал эту проблему, предлагая студентам сунуть руку в карман, нащупать монету и определить ее достоинство. Попробуйте создать робота, который мог бы сделать это! Десятилетия спустя Родни Брукс начинал свои лекции с такого же предложения. Человек делал это легко. Хотя машины могут играть в шахматы, побеждать в «Своей игре» и водить автомобили, в мире осязания и восприятия мало что изменилось.
Солсбери представлял поколение студентов, которые вышли из SAIL во время ее расцвета в 1970-е гг. Во время учебы в магистратуре Стэнфорда он превратил манипулятор для совместного с Лабораторией реактивного движения проекта из механического захвата в более похожее на руку человека устройство. Его диссертация была посвящена геометрии манипуляторов, но Солсбери стремился создать что-то работающее. Он не ложился спать всю ночь перед защитой, пока не заставил двигаться все пальцы.
Он получил степень доктора философии в 1982 г., через год после Брукса. Оба в конечном итоге перешли в Массачусетский технологический институт на преподавательскую работу. Там Солсбери вел исследования в области осязания, считая его ключом к решению ряда проблем в робототехнике. Там же он подружился с Марвином Мински и часами спорил с ним о подходах к конструированию рук роботов. Мински хотел усеять руки датчиками, а Солсбери считал, что прочность важнее восприятия, и многие разработки стали компромиссом между этими двумя вариантами.
Как преподаватель в Лаборатории искусственного интеллекта Массачусетского технологического института он работал со студентом Томасом Масси над переносным контроллером, который должен был служить компьютерным интерфейсом, превращающим трехмерные образы в нечто такое, что можно потрогать и почувствовать. Эта технология стирает границу между виртуальным компьютерным миром и реальностью. Масси (позже он стал представляющим Кентукки конгрессменом от Республиканской партии) и его жена, оба инженеры-механики, превратили идею в компанию Sensable Devices, которая создала недорогое тактильное устройство. После академического отпуска, который он взял, чтобы помочь основать Sensable и Intuitive Surgical, расположенный в Кремниевой долине стартап по разработке хирургических роботов, Солсбери вернулся в Стэнфорд, где в 1999 г. создал лабораторию робототехники.
В 2007 г. он со своими студентами Эриком Бергером и Кинаном Вайробеком сделал PR1, или «Персонального робота 1». На машину мало кто обратил внимание. Однако она могла выйти из здания, купить кофе для Солсбери и вернуться. Робот просил Солсбери дать ему денег, затем проходил через три тяжелые двери. Он открывал каждую из них наполовину за ручку и, повернувшись боком, проходил через проем. После этого PR1 шел к лифту, вызывал его, убеждался, что внутри нет людей, входил в кабину, нажимал кнопку третьего этажа и удостоверялся, что лифт доехал до нужного этажа, с помощью визуальных ориентиров. Выйдя из лифта, робот подходил к кофейному автомату, покупал кофе и приносил его в лабораторию, не пролив ни капли и прежде, чем напиток успевал остыть.
PR1 немного смахивал на гигантскую кофейную банку с руками, колесами с электроприводом и стереокамерами вместо глаз. На его создание ушло 18 месяцев и около $300 000. Обычно им дистанционно управлял оператор, за исключением случаев выполнения заранее запрограммированных задач (например, принести кофе или пиво). Он мог держать в каждой руке около 5 кг и выполнять разные работы по дому. На YouTube выложен впечатляющий видеоролик, где PR1 убирает гостиную. Однако им, как и роботом Atlas компании Boston Dynamics, управляет оператор, а видео ускорено в восемь раз, чтобы скорость его движения казалась сопоставимой со скоростью человека.
Проект PR1 вышел из лаборатории Солсбери в то время, когда молодой преподаватель Стэнфорда Эндрю Ын, эксперт в области машинного зрения и статистических методов, работал над аналогичным, но в большей мере сконцентрированным на программном обеспечении проектом под названием «Стэнфордский робот с искусственным интеллектом», или STAIR. Как-то Ын выступал с докладом о STAIR в рамках программы взаимодействия с промышленными компаниями. В числе слушателей находился выпускник Стэнфорда Скотт Хассан, который разработал для Google алгоритм PageRank, основу поисковой системы компании.
«Пришло время создать робота с искусственным интеллектом», – сказал Ын собравшимся и добавил, что хотел бы видеть робота в каждом доме. Идея нашла отклик у Хассана. Сначала он учился по специальности «информатика» в Университете штата Нью-Йорк в Буффало, а затем занимался по магистерским программам по вычислительной технике в Университете Вашингтона в Сент-Луисе и в Стэнфордском университете, но бросил их, так и не получив степени. Оказавшись на Западном побережье, он принял участие в проекте создания архива интернета Брюстера Кейла, который ставил задачей сохранить копию всех веб-страниц в интернете.
За создание PageRank Ларри Пейдж и Сергей Брин рассчитались с Хассаном акциями компании. Другой свой проект по поиску информации E-Groups Хассан продал компании Yahoo! почти за $500 млн. К тому времени он был очень богатым представителем Кремниевой долины, ищущим интересные проекты.
В 2006 г. Хассан поддержал и Ына, и Солсбери и предложил студентам Солсбери работу в Willow Garage, лаборатории по созданию роботов следующего поколения, в частности беспилотных автомобилей. На взгляд Хассана, домашний робот скорее мог найти свое место на рынке, поэтому он нацелил Willow Garage на создание робота PR2, т. е. на разработку технологии, которая была бы пригодна для других более эффективных проектов.
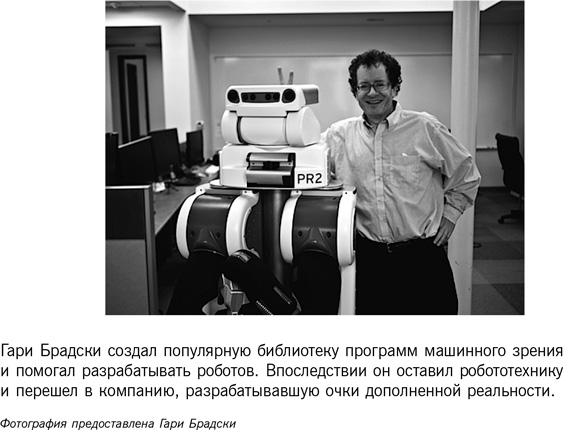
Себастьян Трун начал устанавливать связи в Кремниевой долине во время творческого отпуска в Университете Карнеги – Меллона несколькими годами ранее. В числе его знакомых был Гари Брадски, эксперт в сфере машинного зрения из Intel Labs в Санта-Кларе. Этот самый крупный в мире производитель микросхем разработал производственную стратегию под названием «точная копия» – подход к созданию новых технологий производства микросхем все меньшего размера. Intel отрабатывала новую технологию на предприятии-прототипе, а затем без изменения переносила ее на массовое производство. Такая организация требовала дисциплины, а Брадски был чем-то вроде «дикой утки» (так в IBM называли сотрудников, которые отказывались лететь в общем строю) в строго регламентированной культуре Intel.
Беглец из сообщества биржевых аналитиков на Восточном побережье, Брадски пришел в Intel в 1996 г. и целый год занимался такими скучными и утомительными задачами, как создание библиотеки программ для обработки изображений. После такого испытания его перевели в исследовательскую лабораторию и допустили к интересным проектам. Брадски вырос в Пало-Альто, а потом уехал в Беркли и Бостонский университет, чтобы изучать физику и искусственный интеллект. Однако сидевший в нем предпринимательский дух Кремниевой долины заставил его вернуться.
Некоторое время Брадски писал научные статьи о машинном зрении, но вскоре понял, что они не дают отдачи. Статьи приносили уважение в таких местах, как Беркли, Стэнфорд и Массачусетский технологический институт, но они мало что значили в остальной части Кремниевой долины. Кроме того, до него дошло, что уникальность Intel – ее финансовые возможности. Этим надо было пользоваться. «Я должен сделать нечто большее», – подумал он.
Проработав в Intel год, Брадски познакомился с русскими программистами высшей квалификации, которые сотрудничали с производителем микросхем по контракту, и понял, что они могут быть для него важным ресурсом. В то время популярность движения за программное обеспечение с открытым исходным кодом была на пике. Брадски, имевший опыт работы в сфере машинного зрения, сориентировался и решил создать библиотеку открытых программных средств машинного зрения. Операционная система Linux наглядно показывала, что доступ программистов всего мира к общему набору инструментов значительно облегчает работу каждого. «Я должен дать всем такой инструмент в области исследования машинного зрения», – решил он.
Пока его босс был в творческом отпуске, Брадски запустил свою «Открытую библиотеку машинного зрения» (Open Source Computer Vision – OpenCV), библиотеку программного обеспечения, которая облегчила исследователям разработку приложений для аппаратных средств Intel. Брадски был сторонником стиля, который иногда приписывают адмиралу Грейс Хоппер и которого нередко придерживаются те, кто хочет добиться цели в крупных организациях. Девиз стиля – «Лучше просить прощения, чем спрашивать разрешения». В конечном итоге OpenCV вобрала в себя более 2500 алгоритмов в сфере машинного зрения и машинного обучения. OpenCV также включала программы, которые могли распознавать лица, идентифицировать объекты, различать движения людей и т. д. Первоначальная команда Брадски из нескольких исследователей Intel превратилась в сообщество более чем 47 000 пользователей, и к настоящему времени скачано больше 10 000 000 копий инструментария.
Понимая, что однажды он уйдет из Intel и ему потребуется эффективный набор инструментов для следующего проекта, Брадски разработал второй план. OpenCV должна была стать его визитной карточкой. Разработки в сфере программного обеспечения с открытым кодом пользовались поддержкой в Intel, поскольку компания хотела иметь рычаги давления в непростых отношениях с Microsoft. Эти две компании доминировали в индустрии персональных компьютеров, но часто конфликтовали в вопросах контроля, стратегического направления и – в конечном счете – дохода. Некоторое время Брадски пользовался очень серьезной поддержкой в лаборатории: в какой-то момент в его проекте OpenCV работали 15 исследователей. Это был звездный час в его карьере в Intel.
Руководство Intel премировало его подразделение и сказало: «Хорошо, но нужно идти дальше». «Что вы имеете в виду? – спросил Брадски. – Этот проект на десятилетие». С неохотой он занялся другими вещами, но скрытно продолжил проект OpenCV на стороне. В гигантской полупроводниковой компании на это смотрели косо. Одному из его русских программистов руководство дало на аттестации оценку «необходимо повысить качество работы» по той причине, что тот был связан с проектом.
Брадски расстраивало нежелание Intel оценить проект по достоинству. В 2001 г. Intel ликвидировала занимавшееся фотоаппаратами подразделение, что стало последней каплей. «Опять подход в духе недальновидного бухгалтера, – решил он. – Конечно, это низкорентабельные полупроводники, но это товар, продаваемый в убыток для привлечения покупателей, от которого в конечном счете выигрывает бизнес в целом!» Брадски понятия не имел, что до прихода мобильных компьютеров и смартфонов оставалось всего полдесятилетия, но в тот момент он был прав. Intel не раз бралась за новые идеи и отказывалась от них, прежде чем они могли принести плоды. На фоне разочарования его с легкостью переманил Себастьян Трун, который тогда собирал в Стэнфорде команду для создания беспилотного автомобиля Stanley для соревнований DARPA 2005 г.
Они познакомились в Стэнфорде во время творческого отпуска Труна в 2001 г. Когда Трун в 2003 г. вернулся туда в качестве преподавателя, недовольный ситуацией в Intel Брадски сам собирался взять творческий отпуск в EPFL, Технологическом институте Лозанны, Швейцария. Трун сказал: «Почему бы тебе вместо этого не приехать в Стэнфорд?» Брадски стоял перед трудным выбором. В Швейцарии его ждал научный пир и большой праздник – возможность работать над нейронными сетями и эволюционными алгоритмами обучения. К вечеру он понял, что творческий отпуск в EPFL будет шагом в сторону для того, кто стремится быть предпринимателем. Швейцарская бюрократия обескураживала: чтобы дети могли учиться в частной школе, нужно было договариваться за год, аренда дома в Лозанне выливалась в проблему – один потенциальный арендодатель сказал, что после 22:00 душ не работает, а детям запрещается шуметь!
Поэтому Брадски передумал и отправился в творческий отпуск в относительно либеральный Стэнфорд. Он читал лекции и вынашивал идеи нового стартапа. Его первый проект предполагал создание продвинутой камеры видеонаблюдения, но у партнера были другие планы, и их отношения быстро испортились. Брадски отступил. К этому времени творческий отпуск закончился, он вернулся на работу в Intel и стал руководителем большой исследовательской группы. Управленческая работа доставляла очень много хлопот, и он попытался сократить группу до прежней команды.
Прежде Брадски не обращал внимания на неудовлетворенность других исследователей, но теперь заметил, что недовольные были и в других подразделениях. Он примкнул к подпольной лаборатории недовольных. Как-то при посещении Стэнфорда Трун сказал: «Загляни-ка на нашу автостоянку». Там он показал Брадски секретную разработку, автомобиль Stanley, который готовили к участию во втором состязании DARPA Grand Challenge. Ничего круче этого Брадски еще не встречал и сразу же влюбился в идею. Вернувшись в Intel, он сколотил тайную группу разработчиков, чтобы помочь в создании системы машинного зрения для автомобиля. Спрашивать у кого-либо разрешение он не собирался – технические совещания проводились во время ланча, а по вторникам проходили встречи со стэнфордской командой.
Практически сразу возникли две проблемы. После того как Intel дала обещание не участвовать непосредственно в DARPA Grand Challenge, она стала спонсировать команду Рэда Уиттакера из Университета Карнеги – Меллона. Босс Брадски начал получать жалобы, что Брадски отвлекает людей от их прямых задач. «Это может кончиться увольнением, – сказал босс. – Мы не спонсируем стэнфордскую команду и не занимаемся робототехникой». В качестве поблажки босс разрешил Брадски продолжить работу над проектом лично без привлечения других исследователей лабораторий Intel. Но к тому времени Брадски уже не боялся увольнения. Оно намного все упрощало, и совещания во время ланча участились.
Напряженность в отношениях с Intel достигла кульминации за два дня до гонки. Автомобили и команды прибыли в Примм, небольшой городок с тремя казино на границе Калифорнии и Невады. Брадски позвонил в маркетинговый отдел Intel и сказал, что нужно срочно принять решение, будет ли Intel официально спонсировать автомобиль Стэнфорда. Рекламная наклейка на автомобиль обычно стоила $100 000, но Трун сказал, что команда Брадски очень здорово помогла и они получат статус спонсора всего за $20 000. Сотруднику из отдела маркетинга Intel идея понравилась: спонсирование двух автомобилей удвоило бы шансы Intel поддержать победителя, но он медлил. «Деньги есть, но я не могу самостоятельно распорядиться ими», – сказал клерк.
«Скоро автомобили изолируют, у нас всего полчаса в запасе», – ответил Брадски.
Это сработало. «Хорошо, действуйте», – сказал клерк.
Поскольку это было сделано в последний момент, на автомобиле не осталось места для наклеек за исключением окна пассажира – очень заметное положение. Stanley, украшенный наклейкой Intel, выиграл гонки, так что ход был удачным. Брадски избежал увольнения.
Успеху Stanley в немалой мере способствовала система зрения. Автомобиль был оснащен лазерами, которые отслеживали динамическое облако точек вокруг автомобиля, и цифровыми камерами. Камеры просматривали пространство впереди на достаточное расстояние, чтобы Stanley мог держать скорость и не замедляться. А скорость, понятное дело, необходимое условие победы.
Триумф, однако, длился недолго. У Брадски был небольшой контракт с DARPA на исследование «когнитивной архитектуры» вместе с Труном и Дафной Коллер, еще одним специалистом по машинному обучению из Стэнфорда. Но руководитель программ DARPA объявил о своем уходе, возобновление гранта оказалось под вопросом, и перед Брадски встала проблема поиска финансирования в другом месте. Как и следовало ожидать, Фазу II аннулировали как «излишне амбициозную».
Брадски очень увлекался робототехникой и использовал часть гранта на покупку манипулятора. Покупка стоимостью $20 000 произвела взрывной эффект в юридическом отделе Intel. Там настаивали, что деньги предназначены только для найма молодых специалистов, а не для покупки оборудования, и манипулятор пришлось отдать. Брадски передал его проекту STAIR Стэнфорда, которым руководил Эндрю Ын. Ын подходил к исследованию мира робототехники с идеями машинного обучения. Можно ли создать робота, способного загрузить и разгрузить посудомоечную машину? Манипулятор стал вкладом в совместную работу лаборатории Солсбери и Ына, которая привела к созданию робота PR1.
Бюрократия Intel казалась Брадски все более обременительной. Он понимал, что пришло время уходить, и быстро нашел себе место в израильском стартапе, занимавшемся машинным зрением, в Сан-Матео. Проект OpenCV он забрал с собой. Но стартап оказался не самым удачным выбором. Израильтяне были конфликтными, и Брадски постоянно бодался с техническим директором, бывшим сержантом израильской армии. Обычно его аргументы одерживали вверх, но победа давалась нелегко. Пробыв в новой компании всего год, он снова начал искать работу.
Было трудно искать работу, не привлекая внимание. Он вел переговоры с компанией Facebook, но они не делали ничего интересного в области машинного зрения. «Приходите в любом случае, – сказали ему. – Мы найдем, чем вас занять». Их кадровая служба показалась Брадски очень неорганизованной. На собеседовании ему заявили, что он опоздал. Пришлось предъявить электронное письмо, из которого следовало, что он прибыл вовремя.
«Хорошо, – сказали ему, – час назад вам следовало быть в соседнем здании».
Соседнее здание оказалось запертым и темным. Мелькнула мысль, что это, может быть, такой способ проверки годности к работе и что за его действиями следит камера. Он пинал дверь ногой до тех пор, пока ее не открыли. Вышедший ничего не сказал, но было очевидно, что Брадски разбудил его. Парень оставил дверь открытой, чтобы Брадски мог войти, и молча ушел. Брадски сидел в темном здании и ждал, через некоторое время пришел администратор и извинился за опоздание. Записи о запланированном интервью не оказалось, и он позвонил специалисту по подбору кадров, который, предположительно, все это организовал. После множества извинений и отговорок встреча Брадски с техническим директором Facebook все же состоялась. Несколько дней спустя у него было второе интервью с более высокопоставленным руководителем. Предложение Facebook дало бы ему много средств, но работа там не привлекала. Не нашедший себя в израильской компании Брадски чувствовал, что ему будет скучно в Facebook, где, скорее всего, придется заниматься неинтересными проектами. Поэтому он тянул время. Чем дольше он не соглашался, тем больше Facebook предлагала ему. В тот момент эта работа, наверное, принесла бы ему миллионы долларов, но оставила бы неудовлетворенным.
Однажды Эндрю Ын позвонил Брадски и сказал, что встречается с интересной новой группой робототехников в исследовательской лаборатории под названием Willow Garage. Она была основана Хассаном и больше походила на исследовательскую организацию, чем на стартап. Хассан собирался нанять 70–80 робототехников, чтобы экспериментировать наугад. Это было в духе Кремниевой долины: лаборатории, подобные Xerox PARC и Willow Garage, не были напрямую ориентированы на создание продуктов. Они экспериментировали с технологиями, что часто приводило к неожиданным результатам. Xerox создала PARC в 1970 г., а Пол Аллен финансировал Дэвида Лиддла, чтобы тот создал Interval Research в 1992 г. «по образу и подобию PARC». Идея состояла в том, чтобы «жить в будущем», разрабатывая технологии, которые еще сыроваты, но скоро созреют. Теперь же было похоже, что робототехника созрела для коммерческого применения.
Поначалу Брадски сомневался, стоит ли тратить силы на мимолетное знакомство во время ланча. Ему нужно было обернуться очень быстро, чтобы израильтяне не заметили его отсутствия. Ын настаивал. Брадски знал, что Эндрю обычно не ошибался в таких вопросах, и решил попробовать. Все вдруг встало на свои места. Во второй половине дня Брадски был все еще там, и его уже не волновала судьба стартапа. Он нашел свое место. В конце дня, все еще находясь на автостоянке Willow Garage, он позвонил в Facebook и сказал, что их предложение ему не интересно. Вскоре он ушел и из своего стартапа.
В декабре 2007 г. Брадски стал руководителем группы, занимавшейся зрением для следующего поколения роботов, которое должно было превратить PR1 в PR2. Они построили робота и провели ряд тестов. Хотелось, чтобы робот умел не только доставать пиво из холодильника. Был устроен «марафон» – забег робота на 40 км в офисе компании в присутствии соучредителя Google Сергея Брина. Позже робота научили подключаться к 10 стенным розеткам. «Теперь они могут убежать и постоять за себя», – сообщил Брадски друзьям по электронной почте.
PR2 не был первым мобильным роботом, способным подключаться к электросети. Эта честь выпала мобильному автомату Beast, созданному Лабораторией прикладной физики в Университете Джона Хопкинса в 1960 г., но кроме этого он мало что умел. PR2 был новым воплощением Shakey полстолетия спустя. На этот раз робот был намного более подвижным. Один из восьми PR2, распределенных между университетами, попал к робототехнику Калифорнийского университета в Беркли Питеру Аббилу. Он со своими студентами научил машину складывать белье, хотя и очень медленно.
Хотя команда Willow Garage добилась серьезного прогресса, исследования ясно показали, насколько далеко им до создания машины, способной автономно функционировать в обычном доме. Ветеран робототехники из SRI Курт Конолиге, принятый Брадски на работу в Willow Garage, сказал, что такие проекты растягиваются на десятилетия. Приходится десятки раз прорабатывать каждый шаг, прежде чем все получится как надо.
В конце концов, как и у Пола Аллена, который поставил крест на Interval Research не через 10 лет, как планировалось, а всего через восемь, терпение Скотта Хассана стало подходить к концу. Брадски и Конолиге с тревогой наблюдали, как команда Willow Garage проводит бесконечные мозговые штурмы в поисках идей домашнего робота, которые можно было бы относительно быстро коммерциализировать. Оба понимали, что лаборатории грозит закрытие. Брадски полагал, что знает, кого на самом деле люди хотят иметь дома, – французскую горничную, но это, увы, было неосуществимо в ближайшее время. На встречах с Хассаном Брадски просил разрешить его команде сосредоточиться на производственных роботах, но каждый раз получал отказ. Хассан во что бы то ни стало хотел получить домашнего робота. В конце концов Конолиге махнул рукой на совещания и отправился в плавание на каяке.
Какое-то время Брадски пытался быть командным игроком, но потом понял, что возвращается в мир компромиссов, который он оставил в Intel.
«Какого черта, – подумал он. – Это не для меня. Надо делать то, что хочется».
Брадски начал думать о возможностях применения роботов в промышленности – от перемещения ящиков до сборки изделий с помощью манипуляторов. Встречи с представителями промышленности показывали, что компании очень ждут роботов. Он заявил генеральному директору Willow, что им нужен план B на случай, если задумка с домашним роботом не выгорит. Директор, хотя и с неохотой, все же позволил Брадски сформировать небольшую группу для проработки возможностей промышленного применения роботов.
Соединив манипуляторы с новой технологией машинного зрения, группа Брадски добилась серьезного прогресса, но он старался поменьше говорить Хассану об успехах. Он знал, стоит только заикнуться об этом и проект тут же будет поставлен на коммерческие рельсы. Ему не хотелось выпасть из «гнезда» Willow Garage, прежде чем он будет готов организовать новое предприятие. В начале 2012 г. один из программистов разболтал основателю Willow Garage об их успехах и интересе промышленности к робототехнике. Хассан послал группе электронное письмо: «Завтра я начну финансировать это, встретимся в пятницу утром».
С Конолиге и несколькими другими сотрудниками при финансовом участии Хассана Брадски создал Industrial Perception, Inc., компанию по разработке специализированных манипуляторов для погрузки-разгрузки грузовиков, например машин для доставки посылок. После ухода Брадски в Industrial Perception лаборатория Willow распалась. Из нее вышли пять компаний, несколько команд, занимающихся стандартами для роботов, и консалтинговая фирма. Это был провал – домашние роботы, если не считать роботов-пылесосов, так и остались далекой целью.
Новая компания Брадски начала работу в промышленном районе Южного Пало-Альто. Штаб-квартира находилась в большом гараже и состояла из разделенного на офисы помещения и большого голого пространства, где находились горы коробок, непрерывно переставляемые роботами. К этому времени Industrial Perception привлекла интерес таких гигантов, как Procter & Gamble, которая стремилась интегрировать технологии автоматизации в свое производство и дистрибуцию. Но главное, у Industrial Perception был потенциальный первый заказчик: гигантская компания по доставке посылок UPS серьезно обдумывала замену роботами рабочих на погрузке и разгрузке грузовиков.
Industrial Perception появилась всего лишь на одной выставке Automatica в Чикаго в январе 2012 г. Оказалось, даже такая реклама была не нужна. Год спустя ее офис посетил Энди Рубин. Он разъезжал по стране, разыскивая и приобретая робототехнические компании. Он говорил тем, кого посещал, что через 10–15 лет Google станет мировой службой доставки информации и товаров. Ему требовались машинное зрение и навигационные технологии, а Industrial Perception успешно интегрировала эти технологии в свои манипуляторы, чтобы они могли перемещать коробки. Наряду с Boston Dynamics и шестью другими компаниями Рубин тайно приобрел и Industrial Perception. О сделках, которые Google считала «несущественными», не объявляли более шести месяцев. Даже когда публика узнала о новых амбициях Google, компания очень сдержанно раскрывала свои планы. Как и в случае с автомобилем, Google помалкивала до тех пор, пока молчание не теряло смысла.
Для Рубина, однако, ситуация скоро изменилась. Он пытался добиться от Google разрешения управлять своим новым стартапом, не придерживаясь того, что, с его нынешней точки зрения, было клаустрофобной корпоративной культурой. Проиграв, он в конце 2014 г. покинул компанию и занялся созданием инкубатора новых идей в сфере потребительской электроники.
Подавляющая часть команды Industrial Perception была интегрирована в новое робототехническое подразделение Google. Брадски, однако, и для Google оказался слишком вольной «дикой уткой», что было совсем неплохо, поскольку Хассан все еще имел на него виды. Он представил Брадски Рони Абовицу, успешному молодому робототехнику, который недавно продал компанию Mako Surgical, разрабатывавшую роботов для помощи неопытным хирургам. Абовиц вынашивал еще более масштабную идею, и ему требовался эксперт по машинному зрению.
Абовиц полагал, что он может заново изобрести персональный компьютер и превратить его в идеальный инструмент усиления разума человека. В случае успеха это открыло бы прямой путь к сближению миров искусственного интеллекта и усиления интеллекта. В Mako Абовиц использовал разнообразные технологии для перевода в цифровую форму навыков лучших хирургов и встраивания их в роботизированного помощника. Это позволяло неопытным хирургам использовать шаблонные действия робота для получения стабильно хороших результатов при проведении сложных операций. Другая ведущая компания в этой сфере, Intuitive Surgical, вышедшая из SRI, продавала роботизированные инструменты с дистанционным управлением, которые позволяли хирургам проводить операции с высокой точностью. Абовиц сосредоточился на тактильной обратной связи, пытаясь объединить человека и робота и таким образом расширить возможности хирурга. Помогало то, что специализацией Mako были операции на костной ткани (основным направлением исследований Intuitive по случайности была хирургия мягких тканей). Кость, более твердый материал, было намного легче «чувствовать» с помощью тактильной обратной связи. В такой системе и машина, и человек раскрывали свои лучшие качества, создавая эффективный симбиоз.
Важно отметить, что такой «симбиотический хирург» – не киборг, получеловек-полумашина. Четкая граница между хирургом и роботом здесь не исчезает. В этом случае человек пользуется помощью роботизированного хирургического инструмента. Киборг – создание, в котором грань между человеком и машиной стирается. Абовиц считал, что «сильный» искусственный интеллект, т. е. машина с интеллектом на уровне человека, чрезвычайно труднодостижимая цель, и нужны десятилетия, чтобы добраться до ее, если это вообще удастся. Из своего опыта разработки робота для помощи хирургу он вынес уверенность, что самый эффективный способ создания систем – это использование искусственного интеллекта для расширения возможностей человека.
Продав Mako Surgical в конце 2013 г. за $1,65 млрд, Абовиц занялся реализацией более масштабного проекта – создания стартапа Magic Leap со скромной целью заменить и телевизоры, и персональные компьютеры технологией, известной как дополненная реальность. В 2013 г. система Magic Leap представляла собой громоздкий шлем. Компания хотела уменьшить систему до размера очков и сделать ее во много раз мощнее, чем Google Glass. Вместо Google Брадски пошел на работу в Magic Leap Абовица.
Уже в 2014 г. появились первые свидетельства того, что Абовиц добился существенного прогресса в объединении искусственного интеллекта и усиления интеллекта. Примером служит Джеральд, 15-сантиметровый анимационный персонаж, парящий на фоне какого-то офисного комплекса в пригороде Майами. Его четыре руки мягко машут, а сам он висит в пространстве и кружится перед зрителем. Джеральда на самом деле там нет, это динамическая проекция, напоминающая трехмерную голограмму. Пользователи могут наблюдать за ним через прозрачные линзы, проецирующие то, что ученые-компьютерщики и инженеры-оптики называют «цифровое световое поле», в глаза зрителя. Хотя Джеральд не существует в реальном мире, Абовиц пытается создать не вызывающие дискомфорта компьютеризированные очки, которые позволяют видеть не только подобные Джеральду анимации. В принципе можно проецировать любой визуальный объект, воспринимаемый человеческим глазом. Когда Абовиц описывает систему Magic Leap, он говорит, что она, например, позволит надевшему очки человеку одним взмахом руки создать экран с высокой разрешающей способностью столь же четкий, как и телевизор. Если очки усовершенствовать, они заменят не только наши телевизоры и компьютеры, но и многие другие окружающие нас гаджеты.
Очки представляют собой прозрачную матрицу крошечных электронных излучателей света, которые проецируют световое поле, и, таким образом, изображение попадает прямо на сетчатку. По сути, генерируемые компьютером световые поля имитируют то, что человеческий глаз видит в реальном мире. Это полученная с помощью компьютера версия аналогового светового поля, в которой присутствуют все виды излучения, формирующие изображение в глазу человека. Цифровые световые поля моделируют поведение света в физическом мире. Когда фотоны отражаются от объектов, они ведут себя как потоки света. Эволюция нейрооптической системы человека привела к тому, что хрусталики в наших глазах стали подстраиваться к длине волны естественного света и фокусироваться на объектах. Наблюдая с помощью опытного образца очков Magic Leap, как Джеральд перемещается в пространстве, можно предположить, что в будущем удастся визуально соединить сформированные компьютером объекты с реальным миром. Абовиц утверждает, что технология цифрового светового поля преодолеет недостатки, от которых стереоскопические дисплеи не могут избавиться уже не одно десятилетие. Сегодня эти дисплеи вызывают у пользователей морскую болезнь и не обеспечивают настоящей глубины резкости.
К январю 2015 г. стало ясно, что дополненная реальность больше не является идеей далекого будущего. С большой помпой Microsoft продемонстрировала подобную систему под названием HoloLens на основе конкурирующей технологии. Можно ли представить себе мир, где нет вездесущих жидкокристаллических дисплеев современного мира – телевизоров, компьютерных мониторов, экранов смартфонов? Демонстрация Magic Leap в Голливуде, штат Флорида, наводит на мысль, что дополненная реальность намного ближе, чем кажется. Если это так, то такое достижение изменит также и наше представление об усилении интеллекта и автоматизации. В октябре 2014 г. технология Magic Leap получила значительную поддержку, когда Google вложила в крошечный стартап $524 млн.
Опытный образец очков Magic Leap похож на обычные очки, за исключением тонкого кабеля, который идет по спине пользователя к маленькому компьютеру размером со смартфон. Эти очки не просто отказ от существующих технологий отображения информации. В них широко используются искусственный интеллект и машинное зрение для формирования реальности. Очки неотразимы по двум причинам. Во-первых, их разрешение приближается к разрешающей способности человеческого глаза. Лучшим компьютерным дисплеям еще далеко до этого. В результате мультипликация и картинки намного лучше, чем у сегодняшних бытовых компьютерных игровых систем. Во-вторых, они впервые демонстрируют возможность соединения сгенерированных образов с физической реальностью. До сих пор пределом потребительской компьютерной технологии был графический интерфейс WIMP: окна, изображения, меню и курсор Macintosh и Windows. Очки Magic Leap расширяют возможности персонального компьютера с помощью дополненной реальности и одновременно открывают пути к усилению интеллекта человека.
В мире дополненной реальности «сеть» становится окружающим вас пространством. Камеры внутри очков распознают окружающие объекты, позволяя комментировать и, может быть, изменять их. Например, чтение книги обретает объем: изображения могут плавать над текстом, гиперссылки – оживать, страницы – переворачиваться в ответ на движение глаз, исчезнут ограничения для размеров страницы.
Дополненная реальность – это глубоко антропоцентрическая версия использования компьютеров, соответствующая идее «незаметных» вездесущих компьютеров Марка Вейзера из Xerox PARC. Это будет мир, в котором компьютеры «исчезнут», а привычные предметы приобретут «магическую» силу. Это даст людям множество новых способов взаимодействия с роботами. iPod и iPhone были первыми примерами такого перехода, изменив представления о магнитофоне и телефоне. Дополненная реальность также сделает телеприсутствие намного более осязаемым. Двум находящимся на большом расстоянии людям будет казаться, что они находятся в одном месте. Это радикально изменит сегодняшние видеоконференции и неуклюжих роботов телеприсутствия вроде мобильного робота Beam Скотта Хассана с лицом человека на дисплее.
Гари Брадски оставил мир роботов, чтобы вместе с Абовицом создать то, что потенциально может превратиться в самую эффективную технологию расширения возможностей. Теперь он занимается совершенствованием средств машинного зрения, позволяющих принципиально изменить использование компьютеров, сделать их антропоцентрическими. Подобно Биллу Дювалю и Терри Винограду, он перешел из стана искусственного интеллекта в сообщество усиления интеллекта.
Назад: Глава 6 Сотрудничество
Дальше: Глава 8 …и последнее

