Книга: Самоучитель по радиоэлектронике
Назад: 2.8. Источники питания
Дальше: Глава 3 Конструирование и сборка электронных устройств
2.9. Управление двигателем
2.9.1. Изменение направления вращения двигателя
Важное достоинство двигателей на постоянном токе заключается в том, что они могут вращаться в обоих направлениях — в зависимости от полярности питающего напряжения. Благодаря этому радиоуправляемые модели и игрушечные машины могут двигаться вперед или назад, а электрические отвертки, питаемые от аккумуляторов, завинчивают и отвинчивают винты и гайки.
Управление двигателем осуществляется с помощью специального трехпозиционного переключателя (с фиксацией или без в крайних положениях) или двух реле (рис. 2.49).
Первое реле с одним контактом обеспечивает включение и остановку двигателя. Второе реле, имеющее два контакта, позволяет изменять полярность подаваемого на двигатель напряжения и направление его вращения. Управление реле осуществляется с помощью двух логических сигналов. Отметим, что любители радиоуправляемых моделей все чаще применяют электронные вариаторы, выполняющие аналогичные операции без помощи реле и позволяющие регулировать скорость вращения двигателя.
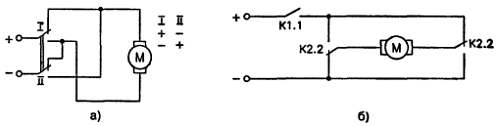
Рис. 2.49. Изменение направления вращения двигателя посредством переключателя (а) и контактов реле (б)
2.9.2. Полная мостовая схема управления вращением двигателя
Полная мостовая схема (Н-образный мост) содержит четыре выключателя, соединенных последовательно-параллельно. Широко распространен электронный вариант моста, где обычно используются транзисторы, работающие в режиме переключения. Такая схема часто служит для управления двигателем постоянного тока и позволяет изменять скорость и направление вращения.
Схема, приведенная на рис. 2.50а, иллюстрирует управление двигателем, который можно привести в одно из четырех различных состояний: вращения в одном или в другом направлении, отключения и принудительной остановки (торможения).
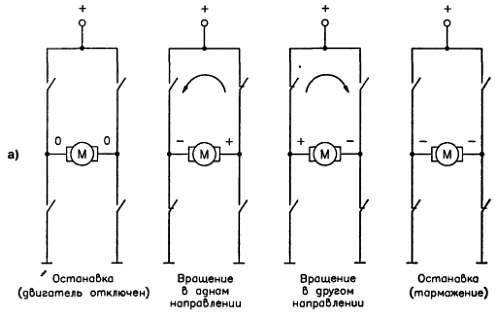
Последний вариант осуществляется путем одновременного замыкания двух нижних выключателей. В результате происходит закорачивание обмотки двигателя. Схема часто используется для управления двигателями в радиоуправляемых моделях. Последовательность сигналов должна быть достаточно точной: нужно избежать одновременного замыкания двух переключателей в одной ветви, что привело бы к закорачиванию источника питания. Чтобы выполнить это условие, для формирования управляющих сигналов обычно применяется специальное устройство. Путем периодического прерывания тока в ветвях моста можно изменять среднее значение тока, протекающего через двигатель, а следовательно, и скорость его вращения.
Другим интересным примером использования полной мостовой схемы является генерация импульсного сигнала, у которого полный перепад уровней равен удвоенной величине напряжения источника питания (рис. 2.50б).
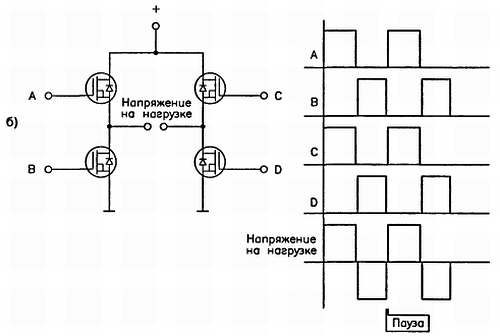
Рис. 2.50. Мостовая схема управления вращением двигателя
Для решения этой задачи периодически чередуют токи в двух противоположных ветвях, выполняя вышеуказанное условие. В зависимости от типа нагрузки, включенной на выходе моста (индуктивной или емкостной), время паузы в подаче сигналов подбирают так, чтобы ток успевал снизиться до прихода сигнала противоположной полярности. Описанная схема может использоваться для подачи сигнала повышенного напряжения на громкоговоритель или в выходных каскадах инвертора,
В качестве переключающих элементов все чаще применяются МОП транзисторы благодаря малому току, потребляемому по цепи управления. Однако переключение мощных транзисторов является непростой задачей, поскольку для этого необходимо располагать управляющим напряжением порядка 10 В относительно истока, который в данном случае является точкой с плавающим потенциалом. Есть несколько возможных решений данной проблемы, в частности подача управляющего сигнала через трансформатор, использование источника питания с незаземленным выходом или применение специализированных схем.

