Книга: Универсум. Общая теория управления
Назад: 5.3. Адаптивная схема управления
Дальше: 5.5. Интеллектуальная схема управления
5.4. Предикционная схема управления
Работа предикционной схемы управления (или схемы «предиктор-корректор», рис. 5.10) подчиняется алгоритмам, которые составляются внешним по отношению к ней интеллектом – суперсистемой (СУ).
При этом СУ не только обобщает опыт прошлых событий (первая точка на оси времени – П, рис. 5.11) и предусматривает обработку ряда возможных ситуаций, способных повлиять на траекторию ОУ (вторая точка на оси времени – Н), но и способна произвести предикционный расчёт траектории достижения цели (третья точка на оси времени – Б).
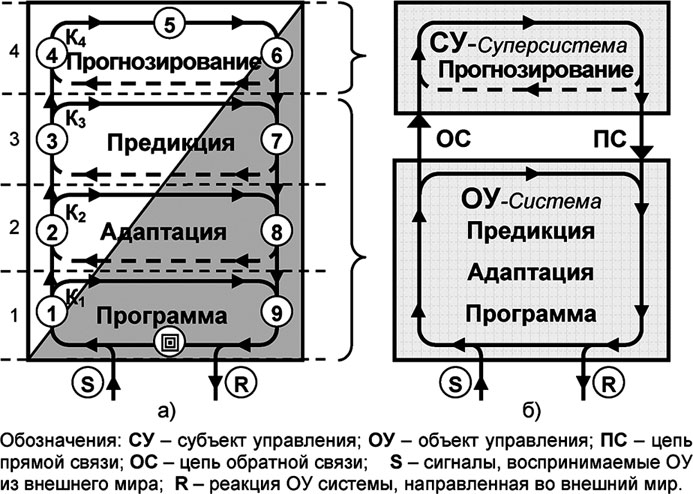
Рис. 5.10. Субъектно-объектная схема предикционного управления
На основании информации о прошлом и ситуации, разворачивающейся в момент полёта ракеты, включая учёт поведения цели, система управления теперь строит экстраполяционный прогноз будущей траектории цели (точка Б) и ведёт ракету к «упреждающей» точке пересечения траекторий. Внешний интеллект, направляющий ракету на цель во время пуска, теперь может осуществлять ещё менее точный (но более долгосрочный) прогноз её поведения, поскольку система управления ракетой сможет не только адаптироваться к более широкому спектру изменений в окружающем мире, но и учесть различные манёвры цели.
Применительно к универсумному описанию вариабельный прогнозный расчёт траектории условным «Преобразователем информации» можно описать как подключение «Алгоритма-сторожа», в котором:
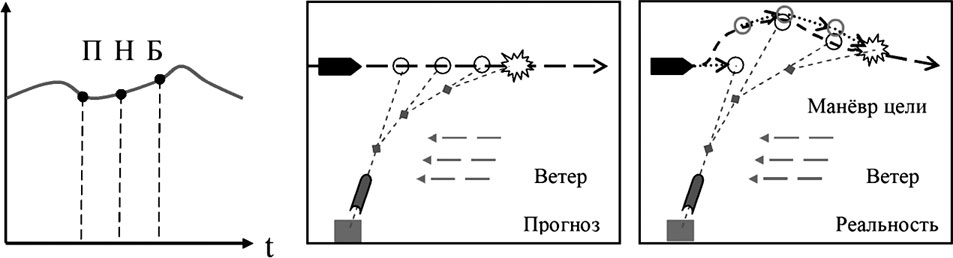
Рис. 5.11. Функционирование систем по схеме «предиктор-корректор»
1) расчётный вариант прогноза носит не окончательный, признанный правильным, а вероятностный характер поэтому помещается в некий «Карантин» – временное хранилище полезных стереотипов;
2) следующее использование прогнозного расчёта может привести к иному варианту достижения цели, при этом лучший вариант достижения целевой функции сохраняется (или замещает худший) в «Карантине»;
3) из «Карантина» в «Память» (т. е. на адаптивный уровень управления) окончательно записывается только тот вариант достижения цели, который статистически достаточно устойчиво, точно и оптимально приводит к успешному взаимодействию системы со внешней средой.
Такой «Алгоритм-сторож» позволяет переводить правильные, надёжно проверенные решения в область программно-адаптивного управления (в классических приложениях иногда называемых «системами второго типа») и представляет собой более детальный вариант описания общего процесса генезис-погружения. Можно также отметить, что аналогичный, но менее быстродействующий «Алгоритм-сторож» работает и на программно-адаптивном уровне, переводя удачные алгоритмики отработки внешних факторов в ещё более быстродействующую область действия программной схемы управления (или «систем первого типа»). В самом простом приложении создания технических устройств «алгоритм-сторож» позволяет закладывать в конструкцию систем некий «расчёт на перспективы будущего применения», оставляя в ней пространство для новых, иногда даже не созданных к моменту проектирования экспериментальных узлов.
При наличии возможностей предикции ракета самостоятельно способна попасть в цель с гораздо большей вероятностью, чем это могут осуществить все рассмотренные ранее схемы. В процессе полёта траектория ракеты посредством включённых в её систему управления гибких алгоритмов, сможет не только адаптироваться к запрограммированным для отработки условиям (задавать параметры программно-адаптивным схемам управления, отрабатывающим, например, полёт в условиях бокового ветра), но и «пойдёт на опережение» с учётом любого изменения поведения цели. Предикционный «доворот» траектории в «точку будущего» позволяет осуществить полёт к цели менее затратным, т. е. более оптимальным образом, одновременно увеличивая такой важный параметр предикции, как дальность поражения цели.
Конечно же, и этот алгоритм не гарантирует стопроцентную вероятность попадания в цель, тем не менее, в реальных условиях он будет работать весьма надёжно. Единственный эффективный «конкурент» этому алгоритму – интеллектуальная система управления, размещённая в системе управления ракетой, что, по понятным причинам, далеко не всегда осуществимо.
С точки зрения управления общественными процессами предикционная схема – это подстройка траектории поведения социума посредством упреждающих действий с использованием различных способов адаптивного поведения. Она соответствует так называемому «демократическому» устройству общества, при котором допускается существование нескольких управленческих альтернатив, предлагающих различные варианты развития событий, которыми можно управлять, например, посредством политических решений, PR-технологий, тайной политической полиции и произволом в распределении денежных потоков.
В более общем смысле эта схема управления связана с понятиями «общественное самоуправление» и «эпоха перемен» (социальных, экономических, политических и т. п.), поскольку именно она позволяет рассматривать различные варианты решения возникающих проблем. Задачи адаптация, т. е. сохранения системы на заданной траектории здесь выполняют подчинённый, вспомогательный характер, поскольку в этом режиме управления система может осуществить предикционное изменение траектории «в угоду» не привычно-сиюминутным, а основанным на расчётной, имеющей определённые границы прогностике. Главное в этом режиме – возможность расчёта и выбора максимально эффективного из альтернативных вариантов траекторий поведения.
Весьма важно подчеркнуть то, что переоценка возможностей вариабельной страты в качестве «демократии» как самоценной и самодостаточной «вещи как таковой» абсолютно недопустима, ведь, в конечном счёте, из нескольких альтернативных решений проблемы кто-то на уровне интеллектуального уровня осмысления должен выбрать только одно – то, которое и будет реализовано в реальной жизни.
Цепь ОС предикционной схемы носит достаточно сложный характер, поскольку содержит не только динамические, но и накопленные в системе статистические параметры отклонений поведения системы от заданной траектории. Характер ПС также сложен, поскольку учитывает как поведение системы на основании статистических данных о её прошлом и настоящем состоянии, так и данные предикции. Если в адаптивной схеме сигналы ОС однозначно определяют последующую выработку сигналов ПС, то в предикционной схеме на ведущую роль претендует уже именно ПС. Процесс упреждающего отклонения движения системы от заданной траектории имеет системный характер – сигналы ПС генерируются в СУ, поэтому здесь роль ОС можно считать подчинённой.
Алгоритмика поведения ОУ в критериях условных переходов использует не только динамические значения, но и критерии генерации и выбора наилучших вариантов (структуры условных переходов и case-конструкций), определяющие предикционные (а именно – слабые) манёвры системы. Так, например, игра в шахматы – это в первую очередь предикционный расчёт в критериях условных переходов. Какой шахматист лучше работает по схеме «предиктор-корректор», т. е. осуществляет более глубокий прогноз, тот, в конечном счете, и побеждает в игре.
Следует также отметить, что с «субъективной точки зрения» адаптивной системы управления, которой не свойственна высокодинамичная прогностика, значения критериев выбора траектории, задаваемые предикционной схемой, чаще всего будут казаться ошибочными. Дело здесь не столько в правильности алгоритмик расчёта траекторий движения системы, сколько в различном отношении этих систем к прогностике.

